- Inertialsensor
-
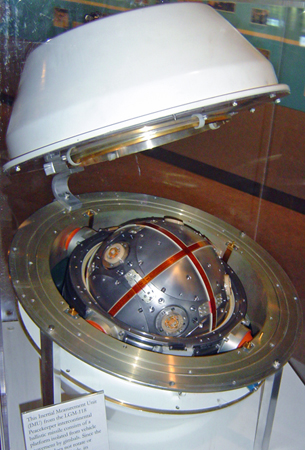
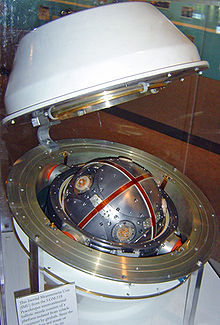 Ältere IMU in einer ballistischen Rakete
Ältere IMU in einer ballistischen Rakete
Inertialsensoren dienen der Messung translatorischer und rotatorischer Beschleunigungen. Durch Kombination mehrerer Inertialsensoren in einer inertialen Messeinheit (englisch: Inertial Measurement Unit (IMU)) können die Beschleunigungen der sechs Freiheiten gemessen werden. Eine IMU ist Hauptbestandteil eines Inertialen Navigationssystems. Heute gebräuchliche Sensoreinheiten mit ausreichender Genauigkeit für Flugnavigation haben eine Seitenlänge zwischen 15 und 30cm und kosten zwischen 30.000 und 80.000 Euro.
Inertialsensoren werden auch in der Bildstabilisierung zur Bewegungsdetektion eingesetzt.
Inhaltsverzeichnis
Entwicklung
Ausgangspunkt für die Entwicklung von Inertialsensoren waren Erkenntnisse aus der Schwingungsmechanik, Physik und der Elektrotechnik. Ihre Entwicklung stellt daher einen multidisziplinären Prozess dar. Ursprünglich wurden Inertialsensoren feinmechanisch hergestellt, heutiger Stand der Technik ist das mikromechanische Fertigen. Zwischen 1990 und 1998 konnte die Leistungsfähigkeit von mikromechanischen Gyroskopen alle zwei Jahre verzehnfacht werden. Weitere Verbesserungen werden durch den Einsatz von adaptiven Filtertechniken erreicht. Beispielsweise lässt sich dazu der Neigungswinkel eines Flugzeuges bestimmen, selbst wenn die Messeinheit durch Querbeschleunigungskräfte beim Anfahren gestört wird.
Technische Bedeutung
Oft kommen bei einem Zusammenspiel mehrerer Inertialsensoren die Stärken dieser Technologie in der Anwendung hervor. Die Kombination unterschiedlicher Inertialsensoren bezeichnet man in der Mikrosystemtechnik als inertiale Messeinheiten (englisch: Inertial Measurement Unit (IMU)). Sie ermöglichen die Erfassung zum Teil komplexer und mehrachsiger Bewegungsvorgänge mit bis zu sechs Freiheitsgraden. Inertiale Messeinheiten werden bei der präzisen Erfassung von Drehbewegungen, Beschleunigungen und Neigungen im Raum eingesetzt. Durch die geringe Baugröße sind die im Sensor auftretenden Signale in der Regel sehr klein und benötigen im Anschluss eine Datenaufbereitung als Schnittstelle zur Weiterverarbeitung.
Sensorik
Inertiale Messeinheiten beinhalten in der Regel die folgenden Sensorarten:
- Drei orthogonal angeordnete Beschleunigungssensoren (auch als Translationssensoren bezeichnet) detektieren die lineare Beschleunigung in x- bzw. y- bzw. z-Achse. Daraus kann die translatorische Bewegung berechnet werden.
- Drei orthogonal angeordnete Drehratensensoren (auch als Gyroskopische Sensoren bezeichnet) messen die Winkelgeschwindigkeit um die x- bzw. y- bzw. z-Achse. Daraus kann die Rotationsbewegung berechnet werden.
Zur Verbesserung der Genauigkeit bzw. um die Drift der oben genannten Sensoren zu korrigieren, werden zusätzlich Magnetfeldsensoren (Kompasssensoren) und GNSS-Sensoren verwendet.
Militärische Bedeutung
Inertialsensoren und -navigationsysteme sind wichtige Bestandteile von Langstreckenraketen oder Marschflugkörpern, insbesondere jene mit kleiner Bauform. Die Sensoren unterliegen deshalb oftmals Ein- beziehungsweise Ausfuhrbeschränkungen.
Literatur
- Zeitschrift: Automobil-Elektronik, August 2008, Artikel: Ausfallsichere Inertialsensoren
- Skript zum Kurs Mikroelektrik und Mikrosystemtechnik, Mikromechanische Inertialsensoren. September 2004, Sebastian Kain
- Datenblatt der Fraunhofer ENAS, High Precision Acceleration Sensor, Dipl-Ing. R. Schmiedel
Wikimedia Foundation.