- Kontaktplan
-
Kontaktplan (Abkürzung KOP) ist eine Methode zur Programmierung von speicherprogrammierbaren Steuerungen (SPS). Im englischen Sprachgebrauch wird er als Ladder Diagram (Abkürzung LD) bezeichnet.
Es handelt sich um eine in der IEC-Norm EN 61131-3 genormte grafische Programmiersprache, die insbesondere für Verknüpfungssteuerungen geeignet ist; in ihrer Darstellung ist sie an Stromlaufpläne angelehnt:
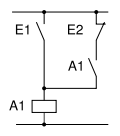 Stromlaufplan
Stromlaufplan
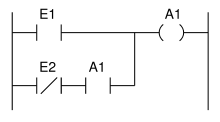 Entsprechender Kontaktplan
Entsprechender KontaktplanWerden die Elemente in Reihe geschaltet, so bedeutet dies eine UND-Verknüpfung. Werden sie parallel geschaltet, so ist dies eine ODER-Verknüpfung. Ein Strich durch das Element bedeutet eine Negierung des Elements.
Eingänge werden dabei als zwei senkrechte parallele Linien dargestellt, Ausgänge dagegen als gegenüberliegende gebogene Linien.
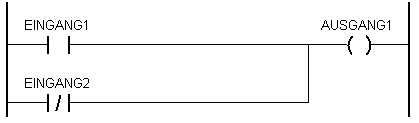
Beispiel: AUSGANG1 = EINGANG1 OR NOT EINGANG2
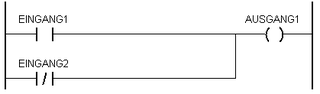 Einfaches Kontaktplanbeispiel
Einfaches KontaktplanbeispielIn fast allen modernen KOP-Sprachen sind aber auch Funktionsblöcke verfügbar, die weit über die eigentliche Verknüpfungssteuerung hinausgehen. So können mit Kontaktplan heute auch komplexe Steuerungsaufgaben realisiert werden.
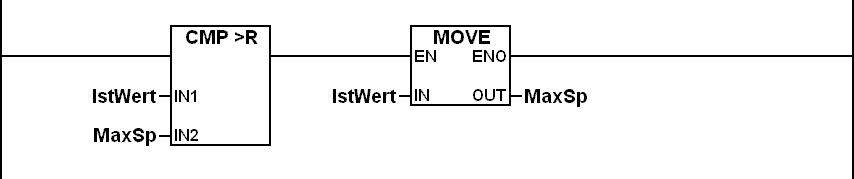
Beispiel: Maximumsuche (KOP-Sprache Step 7)
 Kontaktplan, Maximumsuche
Kontaktplan, MaximumsucheIst die Variable IstWert größer als MaxSp (Maximum-Speicher), wird IstWert als neues Maximum übernommen.


Wikimedia Foundation.