- Satz von der impliziten Funktion
-
Der Satz von der impliziten Funktion ist einer der wichtigsten Sätze in der Analysis. Er beinhaltet ein relativ einfaches Kriterium, wann eine implizite Gleichung oder ein Gleichungssystem (lokal) eindeutig aufgelöst werden kann.
Inhaltsverzeichnis
Begriffsbestimmung
Eine implizit definierte Funktion (kurz implizite Funktion) ist eine Funktion, die nicht in der „einfachen“ Zuordnungsvorschrift y=f(x) gegeben ist, sondern deren Funktionswerte implizit durch eine Gleichung F(x,y) = 0 definiert sind. Dabei ist F eine vektorwertige Funktion, die genauso viele Einzelfunktionen enthält, wie y Komponenten hat. Wird x fixiert, so ergibt sich ein Gleichungssystem in y mit genauso vielen Gleichungen wie Unbekannten. Der Satz über die implizite Funktion beschreibt Voraussetzungen, unter denen die folgende Aussage gilt:
-
- Wenn eine Lösung y0 für einen Parametervektor x0 bekannt ist, dann kann für jeden Parametervektor
 in einer kleinen Umgebung von x0 auch immer eine eindeutig bestimmte Lösung
in einer kleinen Umgebung von x0 auch immer eine eindeutig bestimmte Lösung  des Gleichungssystems F(x,y) = 0 gefunden werden, die in einer Umgebung der ursprünglichen Lösung y0 liegt.
des Gleichungssystems F(x,y) = 0 gefunden werden, die in einer Umgebung der ursprünglichen Lösung y0 liegt.
- Wenn eine Lösung y0 für einen Parametervektor x0 bekannt ist, dann kann für jeden Parametervektor
Diese Aussage des Satzes erlaubt nun, eine Funktion f zu definieren, die jedem Parametervektor
gerade den Lösungsvektor  zuordnet, sodass diese Funktion auf ihrem Definitionsbereich die Gleichung F(x,f(x)) = 0 erfüllt. Der Satz von der impliziten Funktion stellt zudem sicher, dass diese Zuordnung
zuordnet, sodass diese Funktion auf ihrem Definitionsbereich die Gleichung F(x,f(x)) = 0 erfüllt. Der Satz von der impliziten Funktion stellt zudem sicher, dass diese Zuordnung  unter gewissen Bedingungen und Einschränkungen an F, x und y wohldefiniert ist, insbesondere, dass sie eindeutig ist.
unter gewissen Bedingungen und Einschränkungen an F, x und y wohldefiniert ist, insbesondere, dass sie eindeutig ist.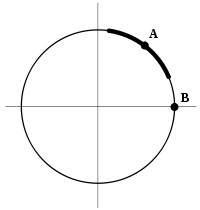 Der Einheitskreis wird als die Menge aller Punkte (x,y) beschrieben, welche die Gleichung F(x,y) = 0 erfüllen, mit F(x,y) = x2 + y2 − 1. In einer Umgebung des Punktes A kann y als Funktion von x ausgedrückt werden:
Der Einheitskreis wird als die Menge aller Punkte (x,y) beschrieben, welche die Gleichung F(x,y) = 0 erfüllen, mit F(x,y) = x2 + y2 − 1. In einer Umgebung des Punktes A kann y als Funktion von x ausgedrückt werden:
 . Bei Punkt B geht das nicht.
. Bei Punkt B geht das nicht.Motivierendes Beispiel
Setzt man F(x,y) = x2 + y2 − 1, so beschreibt die Gleichung F(x,y) = 0 den Einheitskreis in der Ebene. Der Einheitskreis kann nicht als Graph einer Funktion y = f(x) geschrieben werden, denn zu jedem x aus dem Intervall ( − 1,1) gibt es zwei Möglichkeiten für y, nämlich
 .
.Es ist jedoch möglich, Teile des Kreises als Funktionsgraph darzustellen. Den oberen Halbkreis bekommt man als Graph der Funktion
 ,
,
den unteren als Graph von
 .
.
Der Satz von der impliziten Funktion gibt Kriterien für die Existenz von Funktionen wie f1 oder f2. Er garantiert auch, dass diese Funktionen differenzierbar sind.
Satz von der impliziten Funktion
Aussage
Seien
 und
und  offene Teilmengen und
offene Teilmengen undeine stetig differenzierbare Abbildung. Die Jacobi-Matrix
besteht dann aus zwei Teilmatrizen
und
wobei letztere quadratisch ist.
Der Satz von der impliziten Funktion besagt nun:
Erfüllt
 die Gleichung F(x0,y0) = 0 und ist die zweite Teilmatrix
die Gleichung F(x0,y0) = 0 und ist die zweite Teilmatrix  im Punkt (x0,y0) invertierbar, so existieren offene Umgebungen U0 von x0 und V0 von y0 sowie eine eindeutige stetig differenzierbare Abbildung
im Punkt (x0,y0) invertierbar, so existieren offene Umgebungen U0 von x0 und V0 von y0 sowie eine eindeutige stetig differenzierbare Abbildung ,
,
mit f(x0) = y0 so, dass
für alle
 gilt.
gilt.Beispiel
Man wende nun diesen Satz auf das anfangs gegebene Beispiel der Kreisgleichung an: Dazu sind die partiellen Ableitungen nach den y-Variablen zu betrachten. (In diesem Fall ist n=1, also ergibt das eine 1×1 Matrix, beziehungsweise einfach eine reelle Funktion): Die partielle Ableitung der Funktion F(x,y) = x2 + y2 − 1 nach y ergibt
 . Diese Ableitung hat einen Kehrwert genau dann, wenn
. Diese Ableitung hat einen Kehrwert genau dann, wenn  ist. Damit folgert man mit Hilfe des Satzes, dass diese Gleichung lokal nach y auflösbar ist, wenn . Der Fall y = 0 tritt nur in den Punkten x = − 1 oder x = 1 auf. Dies sind also die Problempunkte. Tatsächlich sieht man, dass die Formel sich genau in diesen Problempunkten in eine positive und negative Lösung verzweigt. In allen anderen Punkten ist die Auflösung lokal eindeutig.
ist. Damit folgert man mit Hilfe des Satzes, dass diese Gleichung lokal nach y auflösbar ist, wenn . Der Fall y = 0 tritt nur in den Punkten x = − 1 oder x = 1 auf. Dies sind also die Problempunkte. Tatsächlich sieht man, dass die Formel sich genau in diesen Problempunkten in eine positive und negative Lösung verzweigt. In allen anderen Punkten ist die Auflösung lokal eindeutig.Beweisansatz
Der klassische Ansatz betrachtet zur Lösung der Gleichung F(x,y) = 0 das Anfangswertproblem der gewöhnlichen Differentialgleichung
-
 .
.
Da
in (x0,y0) invertierbar ist, ist dies auch in einer kleinen Umgebung der Fall, d.h. für kleine Vektoren v existiert die Differentialgleichung und ihre Lösung für alle ![t\in [0,1]](a/d9a06fde4663cdd5b1ba693e9127232f.png) . Die Lösung der impliziten Gleichung ist nun durch
. Die Lösung der impliziten Gleichung ist nun durchgegeben, die oben angegebenen Eigenschaften dieser Lösung ergeben sich aus den Eigenschaften der Lösungen parameterabhängiger Differentialgleichungen.
Der moderne Ansatz formuliert das Gleichungssystem F(x,y) = 0 mit Hilfe des vereinfachten Newton-Verfahrens als Fixpunktproblem und wendet darauf den Fixpunktsatz von Banach an. Für die dazugehörige Fixpunktabbildung wird die Inverse A der Teilmatrix
 der Jacobi-Matrix von F im vorgegebenen Lösungspunkt (x0,y0) gebildet. Zu der Abbildung
der Jacobi-Matrix von F im vorgegebenen Lösungspunkt (x0,y0) gebildet. Zu der Abbildungkann man nun zeigen, dass für Parametervektoren x nahe x0 diese Abbildung auf einer Umgebung von y0 kontraktiv ist. Dies folgt daraus, dass T stetig differenzierbar ist und
 gilt.
gilt.Zusammenfassung
Der Vorteil des Satzes ist, dass man die explizite Funktion f gar nicht kennen muss, und trotzdem eine Aussage über deren Existenz und Eindeutigkeit folgern kann. In vielen Fällen ist die Gleichung für y auch gar nicht mit Formeln lösbar, sondern nur mit numerischen Verfahren. Interessant ist, dass die Konvergenz solcher Verfahren meist gleiche oder ähnliche Voraussetzung wie der Satz von der impliziten Funktion (Matrix der y-Ableitungen muss invertierbar sein) erfordert.
Eine weitere wertvolle Schlussfolgerung des Satzes ist, dass die Funktion f differenzierbar ist, falls F(x,y) es ist, was bei Anwendung des Satzes über implizite Funktionen vorausgesetzt wird. Die Ableitung kann sogar explizit angegeben werden, indem man die Gleichung F(x,f(x)) = 0 nach der mehrdimensionalen Kettenregel ableitet:
und dann nach
 auflöst:
auflöst: .
.
Eine ähnliche Folgerung gilt für höhere Ableitungen. Ersetzt man die Voraussetzung "F ist stetig differenzierbar", durch "F ist k-mal stetig differenzierbar" (oder beliebig oft oder analytisch), kann man folgern, dass f k-mal differenzierbar (bzw. beliebig oft bzw. analytisch) ist.
Satz von der Umkehrabbildung
Ein nützliches Korollar zum Satz von der impliziten Funktion ist der Satz von der Umkehrabbildung. Er gibt eine Antwort auf die Frage, wann man eine Umkehrfunktion finden kann:
Sei
 offen und
offen undeine stetig differenzierbare Abbildung. Sei
 und b: = f(a). Die Jacobi-Matrix Df(a) sei invertierbar. Dann gibt es eine offene Umgebung
und b: = f(a). Die Jacobi-Matrix Df(a) sei invertierbar. Dann gibt es eine offene Umgebung  von a und eine offene Umgebung Vb von b, so dass f die Menge Ua bijektiv auf Vb abbildet und die Umkehrfunktion
von a und eine offene Umgebung Vb von b, so dass f die Menge Ua bijektiv auf Vb abbildet und die Umkehrfunktionstetig differenzierbar ist. Es gilt
- D(f − 1)(b) = Dg(b) = (Df(a)) − 1 = (Df(g(b))) − 1
Literatur
- Herbert Amann, Joachim Escher: Analysis II. Birkhäuser, Basel, 1999, ISBN 3-7643-6133-6, S. 230 ff.
- Otto Forster: Analysis 2. 7. Auflage. Vieweg, Wiesbaden 2006, ISBN 3-8348-0250-6, I.8 Implizite Funktionen, S. 86 - 99.
-











Wikimedia Foundation.