- Vorwärtstransformation
-
Die direkte Kinematik oder Vorwärtstransformation ist ein Begriff aus der Robotik. Sie befasst sich mit der Frage, wie aus den Gelenkwinkeln der Armelemente eines Industrieroboters die Pose (Position und Orientierung) des Endeffektors (engl.: Tool Center Point, TCP) in Bezug auf das Basiskoordinatensystem (BKS) bestimmt werden kann. Sie ist das sachliche Gegenstück zur inversen Kinematik.
Bei seriellen Anordnungen von Strukturbauteilen und Gelenken, wie z. B. bei vielen Industrierobotern, kann die direkte Kinematik durch eine einfache Matrizenmultiplikation der Denavit-Hartenberg-Matrizen (siehe Denavit-Hartenberg-Transformation) berechnet werden:
Lage und Orientierung des TCP-Koordinatensystems TCP kann mit Hilfe dieser Matrix nun relativ zum Basiskoordinatensystem BKS ausgedrückt werden, was gleichbedeutend mit der Lösung des direkten kinematischen Problems ist.
Diese Berechnung kann analytisch und damit auch in Echtzeit auf Maschinensteuerungen erfolgen. Bei Maschinen oder Robotern mit parallelkinematischer Struktur, die nicht durch Denavit-Hartenberg-Parameter beschrieben werden können, ist eine analytische Lösung der direkten Kinematik im Allgemeinen nicht möglich. Analytische Lösungen existieren hier nur unter strengen geometrischen Voraussetzungen.
Die Zusammenhänge versucht folgendes Bild zu verdeutlichen:
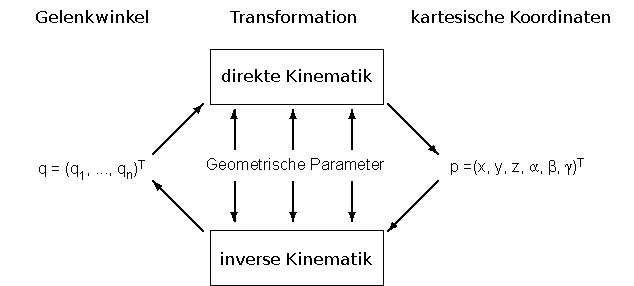
Dabei ist zu beachten, das nur im Falle gleicher Anzahl von Parameter (also in der Regel 6) eine eineindeutige Abbildung möglich ist. Ansonsten spricht man von redundanten Kinematiken.

Wikimedia Foundation.