- Schnittort
-
Der Schnittort (Englisch: cut locus) ist eine abgeschlossene Teilmenge einer semi-riemannschen Mannigfaltigkeit und relativ zu einer anderen Menge in der Mannigfaltigkeit definiert. Der einfachste Fall ist der Schnittort eines einzelnen Punktes. Für Mannigfaltigkeiten wie die Sphäre, den Torus und den Zylinder ist der Schnittort eines Punktes p die Menge der Punkte q, in denen sich mehrere Geodäten treffen, die p und q mit der gleichen kürzesten Länge verbinden. Allgemeiner ist der Schnittort des Punktes p der Abschluss der Menge der Schnittpunkte von p. Prinzipiell ist ein Schnittpunkt q zum Punkt p die Exponentialabbildung eines Vektors aus dem TpM, dessen Länge das Supremum des Intervalls ist, in dem die Exponentialabbildung injektiv ist. Das Konzept des Schnittortes wurde erstmals 1905 von Poincaré untersucht[1].
Inhaltsverzeichnis
Definition
Die genaue Definition der Schnittpunkte ist von der Abstandsfunktion der Mannigfaltigkeit abhängig.
In der Riemannschen Geometrie
Im Fall einer riemannschen Metrik ist der Schnittpunkt der entfernteste Punkt q entlang einer Geodäte bis zu dem diese Geodäte die kürzeste Verbindung von p zu q in der gesamten Mannigfaltigkeit darstellt.
In der Lorentzschen Geometrie
In der Lorentzgeometrie unterscheidet man zwischen dem Nullschnittort, dem zeitartigen Schnittort und dem kausalen (bzw. auch nichtraumartigen) Schnittort. Die Schnittpunkte q zu p im Nullschnittort von p sind die Punkte entlang von Nullgeodäten γ von p ausgehend, für die gilt, dass sie die γ(t) sind bei denen der Parameter t das Supremum des Intervals ist, in dem der lorentzsche Abstand zwischen p und γ(t) null ist.
Für die Definition des zukünftigen zeitartigen Schnittortes betrachtet man Vektoren des Tangentialbündels TM eingeschränkt auf die Menge der zukunftsgerichteten zeitartigen Einheitsvektoren. Dieses Bündel T-1M wird auch Zukunfts-Einheitsbündel genannt. Zu jedem dieser Vektoren v aus der Faser des Bündels über einem Punkt existiert eine einzige zeitartige Geodäte cv der Art, dass ihr Tangentialvektor in diesem Punkt v ist. Die Reichweite der Injektivität der Exponentialabbildung kann man mit diesen Notationen so definieren: Eine Funktion
 für die gilt
für die gilt  , wobei d der lorentzsche Abstand ist und π die kanonische Abbildung aus dem Bündel in die Mannigfaltigkeit, die den Fußpunkt des Vektors gibt. Der zukünftige zeitartige Schnittort von p ist nun einfach die Exponentialabbildung zu allen Vektoren s(v)·v, die in p fußen und für die s(v) zwischen 0 und unendlich liegt, also
, wobei d der lorentzsche Abstand ist und π die kanonische Abbildung aus dem Bündel in die Mannigfaltigkeit, die den Fußpunkt des Vektors gibt. Der zukünftige zeitartige Schnittort von p ist nun einfach die Exponentialabbildung zu allen Vektoren s(v)·v, die in p fußen und für die s(v) zwischen 0 und unendlich liegt, also  . Der kausale Schnittort ist die Vereinigung des zeitartigen Schnittortes mit dem Nullschnittort.
. Der kausale Schnittort ist die Vereinigung des zeitartigen Schnittortes mit dem Nullschnittort.Eigenschaften
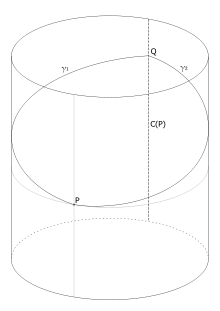 Schnittort C(P) auf der Zylinderoberfläche mit 2 gleichlangen Geodäten γ1 und γ2 der Mannigfaltigkeit, die P mit einem Punkt Q im Schnittort verbinden.
Schnittort C(P) auf der Zylinderoberfläche mit 2 gleichlangen Geodäten γ1 und γ2 der Mannigfaltigkeit, die P mit einem Punkt Q im Schnittort verbinden.
Der Schnittort enthält durch seine Definition über das globale Prinzip des Abstandes Informationen über die Topologie der Mannigfaltigkeit. So sind die Schnittorte eines Punktes auf einer topologischen Sphäre mit riemannscher Metrik Bäume und die Schnittorte auf Tori sind miteinander verknüpfte Ringe. Außerdem sind die Schnittpunkte eng mit dem Prinzip der konjugierten Punkte verknüpft. So gilt in vollständigen riemannschen Mannigfaltigkeiten, dass ein Punkt q des Schnittortes zu einem Punkt p entweder konjugiert ist oder es gibt mindestens zwei Geodäten mit der gleichen kürzesten Länge, die p und q verbinden. Über diese Geodäten gibt es weitere Sätze. Wenn q im beschriebenen Szenario kein konjugierter Punkt zu p ist und gleichzeitig der nächste Schnittpunkt zu p im gesamten Schnittort von p ist, dann gibt es eine geodätische Schleife die beide Punkte enthält. Wenn der Abstand zwischen p und seinem Schnittort, also zwischen p und seinem nächstgelegenen Schnittpunkt, gleich dem Injektivitätsradius der Mannigfaltigkeit ist, dann ist diese geodätische Schleife sogar eine geschlossene Geodäte.
Beispiele
 Die Unterseite eines Seesterns, gut erkennbar sind dunkle Rillen entlang der Arme.
Die Unterseite eines Seesterns, gut erkennbar sind dunkle Rillen entlang der Arme.Das einfachste Beispiel für diese Eigenschaften ist ein Zylindermantel. Die Geodäten in dieser Mannigfaltigkeit sind die Schnitte des Zylindermantels mit einer Ebene (also Kreise und Bögen). Von einem Punkt ausgehend kann man in zwei Richtungen entlang dieser Bögen um den Zylinder herumlaufen. Die rechts- und linksherumlaufenden Geodäten mit gleichem Winkel treffen sich nach gleich langer Strecke entlang einer Gerade längs des Zylinders auf der Rückseite. Diese Gerade ist der Schnittort. Der Punkt des Schnittorts, der dem Ausgangspunkt am nächsten liegt, ist derjenige, der ihm genau gegenüber liegt. Diese beiden Punkte sind also nach dem Satz mindestens mit einer geodätischen Schleife verbunden. Da allerdings beim Zylinder der Injektivitätsradius gleich dem halben Umfang ist, ist die Entfernung von jedem Punkt zu seinem Schnittort auf dem Zylinder gleich dem Injektivitätsradius. Es muss also eine geschlossene Geodäte geben, die den Punkt und seinen Antipoden verbindet. Das ist hier offensichtlich durch den Kreis erfüllt, der durch beide Punkte geht.
Ein Beispiel, an dem die Baumstruktur bei topologischen Sphären gut erkennbar wird, ist die Oberfläche eines abstrahierten Seesterns. Der Schnittort zum Mittelpunkt der Oberseite ist eine sternförmige Anordnung von Strahlen entlang der Arme auf der Unterseite. Also die dunklen Linien im nebenstehenden Bild. Dieser Schnittort enthält die Information über die Anzahl und Länge der Arme, wobei jeder Strahl etwas kürzer als der Arm, an dem er entlangläuft, ist.
Literatur
- J. Beem, P. Ehrlich, K. Easley: Global Lorentzian Geometry, 2. Auflage, Marcel Dekker, New York (1996)
Einzelnachweise
- ↑ Poincaré, H.: Sur les lignes géodésiques des surfaces convexes. Trans. Amer. Math. Soc. 6, 237-274 (1905)


Wikimedia Foundation.