- Cordic
-
Der CORDIC-Algorithmus (COordinate Rotation DIgital Computer) ist ein effizienter iterativer Algorithmus, mit dessen Hilfe sich viele Funktionen implementieren lassen, wie z. B. trigonometrische, exponential und logarithmische sowie auch die einfache Multiplikation oder Division.
Inhaltsverzeichnis
Motivation
In der Rechentechnik, vornehmlich in der digitalen Signalverarbeitung, benötigt man schnelle Verfahren für die Berechnung von bspw. trigonometrischen Funktionen. Herkömmliche Reihenentwicklungen wie z. B. die Taylorreihe zeigen oft nur mittelmäßige (d. h. langsame, oder gar von den Argumenten abhängige) Konvergenz und schlechte numerische Stabilität. Eine Reihenentwicklung besteht außerdem hauptsächlich aus einer Summe von Produkten welche nur aufwendig zu berechnen sind.
Geschichtliche Entwicklung
Der CORDIC-Algorithmus wurde 1959 von Jack E. Volder präsentiert. In der ursprünglichen Version war es möglich, damit trigonometrische Funktionen wie Sinus, Cosinus und Tangens und die Multiplikation und Division von Zahlen nur durch die in digitalen Schaltungen einfach realisierbare Additionen und Schiebeoperationen (engl. shift-and-add operations) zu bilden. Schiebeoperationen zur Zahlenbasis sind in digitalen Schaltungen sehr leicht durch entsprechende Verschaltung realisierbar.
Volders Motivation war der Ersatz der üblichen und fehleranfälligen analogen Navigationsrechner in Convair-B-58-Bombern durch digitale Rechner zur genauen Positionsbestimmung. Die Anforderung war die Positionsberechnung der mit Überschallgeschwindigkeit fliegenden Bomber in Echtzeit über einer als vereinfacht kugelförmig angenommenen Erdoberfläche.
Mitte der 1960er Jahre wurde der CORDIC-Algorithmus auch in zivilen Anwendungen eingesetzt. Vorläufer der heutigen Taschenrechner wie der Tischrechner 9100 von Hewlett-Packard aus dem Jahr 1968 setzten den CORDIC-Algorithmus zur Berechnung der trigonometrischen Funktionen ein.
Erst 1971 wurde von J. S. Walther der CORDIC-Algorithmus auf die heute übliche Form erweitert und damit auch die effiziente Berechnung von Logarithmen, der Exponentialfunktion und der Quadratwurzel in digitalen Schaltungen möglich.
Anwendungsbeispiele
CORDIC-Algorithmen werden zur Berechnung der wichtigsten Elementarfunktionen in Mikrocontroller-Rechenwerken wie Taschenrechnern eingesetzt. So findet sich auch im arithmetischen Koprozessor 8087 von Intel der CORDIC-Algorithmus zur Berechnung mathematischer Operationen. Weitere Anwendungsbeispiele liegen in der Nachrichtenübertragung. Damit lassen sich beispielsweise effizient Betrag und Phase eines komplexen Signals bestimmen.
Da Multiplizierwerke vor allem in digitalen Schaltungen umfangreich und damit teuer zur realisieren sind, wird CORDIC oft genau da eingesetzt, wo Multiplizierer nicht effizient verfügbar sind. Dies umfasst vor allem den Bereich der digitalen Schaltungstechniken wie FPGAs oder ASICs.
CORDIC ist zwar nicht der schnellste Algorithmus, wird aber seiner Einfachheit und Vielseitigkeit wegen oft eingesetzt.
Funktionsweise (Zweidimensional)
CORDIC kann man im
 , aber auch nur in der zweidimensionalen Ebene betrachten.
, aber auch nur in der zweidimensionalen Ebene betrachten.Dreht man ein Koordinatensystem um den Winkel − Θ, erscheint der Vektor
 um den Winkel Θ gedreht; sein Endpunkt liegt im neuen System bei
um den Winkel Θ gedreht; sein Endpunkt liegt im neuen System bei  und
und  .
.Die Rotation um den Winkel Θ entspricht dem Matrix·Vektor Produkt:

D. h. um auf den eigentlichen Funktionswert zu kommen, muss der Einheitsvektor
um Θ gedreht werden. Dies lässt sich leichter bewerkstelligen, wenn innerhalb der Transformationsmatrix nur noch eine Abhängigkeit von einer Winkelfunktion z. B. tan besteht:
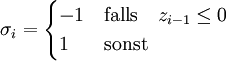
Die Drehung um Θ wird trickreich realisiert als Linearkombination von Teildrehungen um geschickt gewählte Teilwinkel αi.

Eine zu weite Drehung im Schritt i wird kompensiert durch einen Vorzeichenwechsel σi + 1: = − σi. Das gezeigte Verfahren konvergiert und ist numerisch stabil für alle Θ, die sich aus obiger Summe ergeben können. Man führt nun noch eine Hilfsvariable z ein, die für den Drehsinn Verantwortung trägt:

Wenn nur einfachste Bauteile verwendet werden sollen und daher keine Multiplizierer vorhanden sind, muss man alles über Schiebe- und Addieroperationen bewerkstelligen. Dieses wird erreicht durch den Ansatz
 .
.Man erhält damit den folgenden Algorithmus:

mit dem Skalierungsfaktor
 , der während der Initialisierungsphase implizit berechnet wird.
, der während der Initialisierungsphase implizit berechnet wird.


Initialisierung
Vorweg wird eine Tabelle T fester Länge L angelegt mit
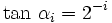
 wobei δ1 = 1 ist. Die folgenden Werte sind:
wobei δ1 = 1 ist. Die folgenden Werte sind:  mit δj = δj − 1 / 2. (Die Werte des Arcustangens lassen sich mit der hier gut konvergierenden Potenzreihenentwicklung bestimmen.)
mit δj = δj − 1 / 2. (Die Werte des Arcustangens lassen sich mit der hier gut konvergierenden Potenzreihenentwicklung bestimmen.)Die Länge L der Tabelle bestimmt die erreichbare Genauigkeit. Führt man alle Drehungen eines Einheitsvektors
 mit den so berechneten Werten hintereinander in gleichem Drehsinn aus, erzielt man eine Gesamtdrehung von etwas mehr als
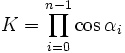
mit den so berechneten Werten hintereinander in gleichem Drehsinn aus, erzielt man eine Gesamtdrehung von etwas mehr als  π / 2. Der Skalenfaktor K wird mit einem Aufruf im Vektormodus (s. u.) berechnet, indem man die Verlängerung des Einheitsvektors ohne Skalierung berechnet.
π / 2. Der Skalenfaktor K wird mit einem Aufruf im Vektormodus (s. u.) berechnet, indem man die Verlängerung des Einheitsvektors ohne Skalierung berechnet.Rotationsmodus
Der Ausgangsvektor
wird in jedem der Schritte so gedreht, dass der Winkel z = Θ gegen Null geht. Es werden stets alle L Teildrehungen ausgeführt, mit ggf. wechselndem Vorzeichen. Da der Kosinus eine gerade Funktion ist, spielt das Vorzeichen bei der Skalierung keine Rolle. Nach Reskalierung sind die Komponenten des erhaltenen Endvektors  und
und  . Der Konvergenzbereich ergibt sich zu
. Der Konvergenzbereich ergibt sich zu  , also bei genügend großem n etwa zu
, also bei genügend großem n etwa zu  , d. h. er erstreckt sich über mehr als den vierten und ersten Quadranten.
, d. h. er erstreckt sich über mehr als den vierten und ersten Quadranten.Vektormodus
Der vorgegebene Vektor, dessen Polarkoordinaten gesucht werden, wird immer so gedreht, dass sich der Betrag seiner y-Komponente verringert. Der Drehwinkel Θ wird dabei vorzeichenrichtig aufaddiert. Die x-Komponente des Endvektors ist nach Reskalierung der Betrag des Ausgangsvektors. Dieser Modus wird auch benutzt zu Berechnung des Arcustangens aus zwei Argumenten, Start mit
 . Der Konvergenzbereich ist derselbe wie oben. Aus
. Der Konvergenzbereich ist derselbe wie oben. Aus  lassen sich die Funktionen
lassen sich die Funktionen  und
und  unter Zuhilfenahme von
unter Zuhilfenahme von  leicht ableiten.
leicht ableiten.Bereich außerhalb von
 π / 2
π / 2Der Startvektor
bzw.  entspricht einer Vorwegdrehung von π / 2 bzw. − π / 2 (für den Rotationsmodus). Bei einem Startvektor mit negativer x-Komponente im Vektormodus bewirkt man entsprechende Drehungen durch Vertauschen der Komponenten und Änderungen der Vorzeichen.
entspricht einer Vorwegdrehung von π / 2 bzw. − π / 2 (für den Rotationsmodus). Bei einem Startvektor mit negativer x-Komponente im Vektormodus bewirkt man entsprechende Drehungen durch Vertauschen der Komponenten und Änderungen der Vorzeichen.Verallgemeinerung
Die oben benutzten Iterationsformeln
 sind ein Sonderfall der allgemeineren Vorschrift
sind ein Sonderfall der allgemeineren Vorschrift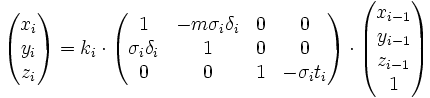 mit m = 1 und δi = 2 − i sowie
mit m = 1 und δi = 2 − i sowie  .
.Lineare Modi
Für m = 0,
![\delta_i=t_i=[1,\;1/2,\; 1/4,\; 1/8\; ...]](/pictures/dewiki/56/80a0dc82016eaab2cee81a98421e600a.png) und k = 1 erhält man
und k = 1 erhält man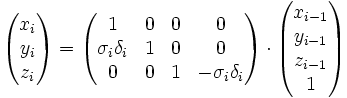 , womit sich Multiplikation und Division durchführen lassen. Eine Tabelle T erübrigt sich hier.
, womit sich Multiplikation und Division durchführen lassen. Eine Tabelle T erübrigt sich hier.Multiplikation: x0 = a, z0 = b, ergibt im Rotationsmodus (z gegen 0)
 für alle − 2 < b < 2.
für alle − 2 < b < 2.Division: x0 = b, y0 = a, ergibt im Vektormodus (y gegen 0) zn = z0 + a / b für alle − 2 < b < 2.
Hyperbolische Modi
Mit m = − 1 werden die Hyperbelfunktionen, ihre Umkehrungen (Areafunktionen), Exponentialfunktion und Logarithmus sowie die Quadratwurzel berechenbar. Einheitskreis bzw. -hyperbel werden durch
 mit m = + 1 bzw. m = − 1 beschrieben. Das zu einem Vektor
mit m = + 1 bzw. m = − 1 beschrieben. Das zu einem Vektor  gehörende Winkel- bzw. Areaargument ist durch
gehörende Winkel- bzw. Areaargument ist durch  gegeben, also
gegeben, alsom = 1, Winkelfunktionen (s.o):
 und
undm = − 1, hyperbolische Fkt.:
 , hier i2 = − 1;
, hier i2 = − 1;  ; und wegen
; und wegen  auch
auch  .
.Das Verfahren ist analog zu dem eingangs gezeigten für die Winkelfunktionen. Erforderlich sind nur eine weitere Tabelle mit
 ,
, ![\delta_i= [1/2,\; 1/4,\; 1/8\; ...]](/pictures/dewiki/55/7899c6164979e2d4cc6eb527c1bb6ad6.png) und die einmalige Berechnung des Skalenfaktors K.
und die einmalige Berechnung des Skalenfaktors K.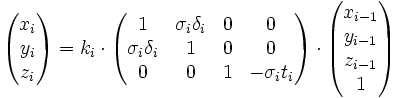
Die Iterationen i = 4,13,40,k,3k + 1 müssen immer wiederholt werden, da der Areatangens Hyperbolicus nicht die Bedingung
 erfüllt, dass somit für die Reihe
erfüllt, dass somit für die Reihe  nicht konvergieren würde.
nicht konvergieren würde.Rotation mit
![[x_0,\; y_0]=[1,\; 0]](/pictures/dewiki/100/dfdb51f2cf110ae7be81500836fd96a6.png) liefert:
liefert:  ,
,davon abgeleitet:
 und
und 
Vektormodus mit z0 = 0 berechnet:
 und den hyperbolischen Betrag
und den hyperbolischen Betrag 
davon abgeleitet:
 sowie
sowie  aus dem Betrag des Startvektors
aus dem Betrag des Startvektors ![[w+1/4,\; w-1/4]](/pictures/dewiki/55/797d319497dad379167168ae30e0e3ec.png)
Der Konvergenzbereich ist in beiden Modi beschränkt durch die maximal mögliche Änderung von z. Alle mathematisch erlaubten Argumente können jedoch durch einfache Umstellungen und Shift-Operationen auf ihn abgebildet werden.
Alternativen
Als Alternativen kommen hauptsächlich schnelle Tablelookup-Verfahren, wie in z.B. DSPs, und Bitalgorithmen, die mit einem ähnlichen Ansatz wie CORDIC die Berechnung vornehmen, in Frage.
Literatur
- Jack E. Volder: The CORDIC Trigonometric Computing Technique. In: IRE Transactions on Electronic Computers. September 1959.
- Jean-Michel Muller: Elementary Functions. Verlag Birkhäuser, 2006, ISBN 0-8176-4372-9.
- D. H. Daggett: Decimal-Binary conversions in CORDIC. In:IRE Transactions on Electronic Computers. Vol. EC-8 #5, pp335-339, IRE, September 1959.
- J. E. Meggitt, Pseudo Division and Pseudo Multiplication Processes. In: IBM Journal. April 1962.
- Vladimir Baykov: Problems of Elementary Functions Evaluation Based on Digit by Digit (CORDIC) Technique. PhD thesis, Leningrad State Univ. of Electrical Eng., 1972.
- Hermann Schmid: Decimal computation. Wiley, New York 1974.
- V. D. Baykov, V. B. Smolov: Hardware implementation of elementary functions in computers. Leningrad State University, 1975, 96p.
- Don Senzig, Don: Calculator Algorithms. In: IEEE Compcon Reader Digest. IEEE Catalog No. 75 CH 0920-9C, pp139-141, IEEE, 1975.
- V. D. Baykov, S. A. Seljutin: Elementary functions evaluation in microcalculators. Radio & svjaz, Moscow 1982, 64p.
- Vladimir D. Baykov, Vladimir B. Smolov: Special-purpose processors: iterative algorithms and structures. Radio & svjaz, Moscow 1985, 288 pages.
- M. E. Frerking: Digital Signal Processing in Communication Systems. 199.
- Vitit Kantabutra: On hardware for computing exponential and trigonometric functions. In: IEEE Trans. Computers. 45 (3), 328-339 (1996).
- Ray Andraka: A survey of CORDIC algorithms for FPGA based computers.
- CORDIC Bibliography Site
Weblinks
Wikimedia Foundation.