- Fahrzeugkoordinatensystem
-
Ein Fahrzeugkoordinatensystem ist ein dreidimensionales, rechtshändiges Koordinatensystem, das die Lage aller Fahrzeugteile bezüglich des Fahrzeugnullpunkts definiert, der bei Kraftfahrzeugen in der Mitte einer gedachten Linie zwischen den Mittelpunkten beider Vorderräder liegt.
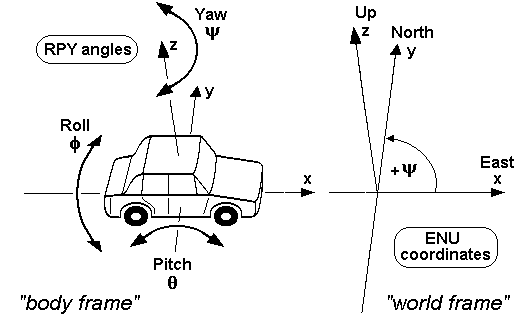
Was die Achsenrichtungen angeht, gibt es dagegen je nach Fahrzeugtyp mehrere Konventionen. Übereinstimmung zeigt sich dabei nur für die positive x-Achse (engl. roll axis), die sowohl bei Raum-, Luft-, Wasser- und Landfahrzeugen stets in deren Flug- bzw. Bewegungsrichtung (engl. heading) zeigt. Bei Landfahrzeugen, die das ENU-System (East-North-Up) als Bezugssystem verwenden, zeigt die positive y-Achse (engl. pitch axis) stets nach links bzw. Backbord und die senkrecht auf der x-y-Ebene des Fahrzeugs stehende positive z-Achse (engl. yaw axis) stets nach oben[1] (siehe auch Roll-Nick-Gier-Winkel#Details).
Ebenfalls gebräuchlich sind aber auch in der x-y-Ebene um 180° gewendete Koordinatensysteme, deren positive x-Achse entgegen der Fahrtrichtung nach hinten zeigt, die y-Achse dementsprechend nach rechts zeigen muss und die z-Achse wieder wie oben beschrieben nach oben weist.
Besonders beim Einsatz von CAE-Techniken (computer-aided engineering, insbesondere CAD und CAQ) ist die Kenntnis der jeweiligen Fahrzeugkoordinaten wichtig, um alle simulierten Bauteile stets lagerichtig zu einem virtuellen Fahrzeug zusammensetzen zu können.
Literatur
- Hans-Hermann Braess, Ulrich Seiffert: Vieweg Handbuch Kraftfahrzeugtechnik. 2. Auflage, Friedrich Vieweg & Sohn Verlagsgesellschaft mbH, Braunschweig/Wiesbaden, 2001, ISBN 3-528-13114-4
Einzelnachweise
- ↑ NavCommand. Software zur Konfiguration und Bedienung von iMAR - Inertialmeßsystemen. Handhabung und Benutzerhinweise. St.Ingbert 2005, S.11-12. http://www.imar-navigation.de/index.php/de/downloads/file/58-navcommand-manual.html
Wikimedia Foundation.