- Remotely Operated Vehicle
-
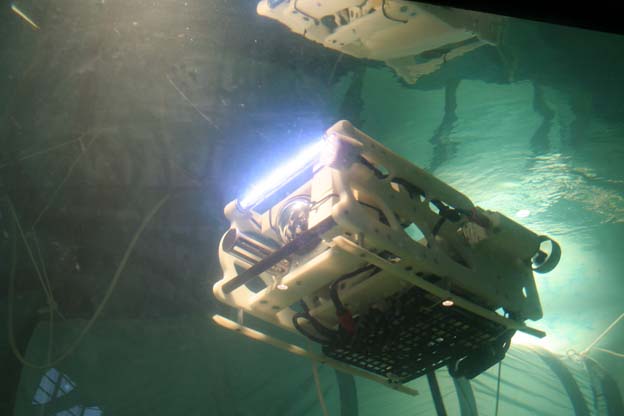
 Ein typisches Mini-ROV (ROV EdVard der Hochschule Bremerhaven) mit CTD Sonde und Kamerasystem
Ein typisches Mini-ROV (ROV EdVard der Hochschule Bremerhaven) mit CTD Sonde und Kamerasystem
Ein Remotely Operated Vehicle (ROV; deutsch ferngesteuertes Fahrzeug) ist ein kabelgeführtes Unterwasserfahrzeug für Anwendungen in Wissenschaft, Industrie und dem Militär.
ROVs werden überwiegend in der Ölindustrie eingesetzt. Wartungsarbeiten, Inspektionen und andere Arbeiten im Offshorebereich werden heute mehrheitlich anstelle von Tauchern oder bemannten Tauchbooten von ROVs durchgeführt. Damit gelingt es, deutlich tiefer zu tauchen und länger unter Wasser tätig zu sein, als es mit Tauchern möglich wäre. Gegenüber den bemannten Booten sind sie nicht nur risikoloser, sondern insbesondere preiswerter einzusetzen, da beispielsweise durch den Verzicht auf die Lebenserhaltungssysteme eine bessere Platzausnutzung möglich ist.
Während ROVs mit einer Kabelverbindung (englisch umbilical wörtlich ‚Nabelschnur‘) zur Energie- und Informationsübertragung an ein Überwasserschiff angeschlossen sind, kommen Autonomous Underwater Vehicles (AUV), ohne eine solche Kabelverbindung aus und führen ihren Energievorrat in Batterien mit sich. Beide Lösungen haben ihre Vor- und Nachteile und dienen unterschiedlichen Zwecken. Rein äußerlich sind ROVs und AUVs leicht zu unterscheiden. ROVs sind meist Rahmen oder Gerüste, die mit verschiedenen Komponenten ausgestattet sind, und tragen eine Vielzahl an Antriebspropellern (engl. thruster), um in alle Richtungen zu manövrieren. Demgegenüber müssen AUVs mit ihrer Antriebsenergie sparsam umgehen und sind deshalb mit einer widerstandsarm geformten Außenhaut verkleidet wie U-Boote oder Torpedos. AUVs werden von Forschungsschiffen zu Beispiel in den Weltmeeren ausgesetzt und tauchen programmiert in die Tiefen ab, um wissenschaftliche oder Vermessungsdaten zu sammeln. Nach einer vorbestimmten Zeit tauchen sie wieder auf und übermitteln diese Daten per Satellit an eine Forschungsstation. Der Datenerfassungszyklus wiederholt sich solange bis das AUV den Auftrag beendet hat und wieder „eingefangen“ wird.
ROVs gibt es in vielen verschiedenen Ausführungen und Klassen, beispielsweise Micro ROVs, Mini ROVs, Work-Class ROVs, Multi-Role ROVs (Multifunktion) und Trencher (Grabenspülung zur Seekabelverlegung). Kleinere ROVs sind meist rein elektrisch und größere werden elektro-hydraulisch betrieben. Micro ROVs wiegen ab 1,5 kg, inklusive Kamera, Antriebe und Leuchten. Trenchersysteme können bis 20 t wiegen. Ein weiteres Beispiel eines ROVs betreibt die niederländische Schwimmbagger-Firma Boskalis. Greifer, die mit Propellern ausgestattet sind, um am Meeresboden eine größere Fläche auszubaggern ohne das Schiff bewegen zu müssen (Zweck: Schutz offshoretechnischer Anlagen vor Eisbergen, die über Grund schleifen). Dieses Beispiel verdeutlicht, dass AUVs durch ihre bedingten Interventionsmöglichkeiten nicht unbedingt als bessere Alternative zu ROVs angesehen werden können.
Beispiele
- Der japanische Tauchroboter Kaikō tauchte 1995 im Marianengraben als erstes ROV zum tiefsten Punkt des Meeres auf 10911,4 m ab.
- Der Scorpio 45 ist ein Tauchroboter, der im August 2005 bei der Befreiung eines manöverierunfähigen russischen U-Bootes der Pris-Klasse vor der Kamtschatka-Halbinsel Berühmtheit erlangte.
- Ein anderer namens Snoop Dog drang 1995 für den Film Titanic erstmals in Räumlichkeiten der 1912 versunkenen Titanic ein und machte so unvergleichliche Aufnahmen.
- Bei der Ölkatastrophe im Golf von Mexiko waren verschiedenste Typen im Einsatz.[1]
Literatur
- Sarah Webster: The Development of Excavation Technology for Remotely Operated Vehicles. in: Robert D. Ballard: Archaeological oceanography. Princeton Univ. Press, Princeton 2008, ISBN 0-691-12940-1, S. 41–64.
- Robert D. Christ: The ROV Manual – A User Guide for Observation-Class Remotely Operated Vehicles. Butterworth Heinemann, Oxford 2007, ISBN 978-0-7506-8148-3.
Weblinks
- Geschichte und Hintergrundinformationen zu ROVs (englisch)
- An der langen Leine – Artikel und Steckbriefe zu prominenten Tauchrobotern auf dem Geowissenschaften-Portal planeterde
- Selbstbauprojekt der Hochschule Bremerhaven
- Selbstbauprojekt Descent303
- ROVs marum.de, abgerufen am 16. Oktober 2011
Einzelnachweise
- ↑ Ölpest - Roboter-Armee am Meeresgrund derstandard.at, 26. Juni 2010
Wikimedia Foundation.