- Torpedo
-
 Torpedo in einem U-Boot vor dem Einführen in das Torpedorohr
Torpedo in einem U-Boot vor dem Einführen in das Torpedorohr
Der moderne Torpedo ist eine Unterwasserwaffe mit eigenem Antrieb und einer Sprengladung. Er zündet bei Kontakt oder bei Annäherung an ein Ziel. Der Torpedo ist vor allem als Hauptwaffe von U-Booten bekannt, kann jedoch auch von Überwasserschiffen, Flugzeugen und Hubschraubern aus eingesetzt werden. Verwendung findet er außer auf U-Booten vor allem auf Torpedobooten und Torpedobombern. Aber auch Zerstörer und teilweise sogar Kreuzer und Schlachtschiffe wurden mit Torpedos ausgerüstet. Es gibt auch Seeminen, die Torpedos verschießen. Torpedos wurden auch von Land aus verschossen. Dies geschieht meistens aus sogenannten Torpedorohren. Flugzeuge, Hubschrauber und kleine Torpedoschnellboote werfen spezielle Torpedos ohne solche Starthilfen ab.
Torpedos werden nach ihrem Durchmesser entweder in der englischen Maßeinheit Zoll (") oder in Zentimetern (cm) klassifiziert. Dabei sind Größen von 17–22,5" (ca. 43–57 cm) verbreitet. In der deutschen Marine gab es bis zum Ende des Ersten Weltkriegs vier Größen von 35, 45, 50 und 60 cm. Die Reichsmarine verwendete für die Seeschiffe ab 1927 nur noch einen Durchmesser von 53,3 cm, für die Lufttorpedos 45 cm. Moderne Torpedos haben zum Teil erheblich größere Durchmesser. Länge und Gewicht der Torpedos variieren sehr stark, betragen aber immer mehrere Meter Länge und meistens mehr als eine Tonne Gewicht.
Torpedos können Bestandteile anderer Waffensysteme bilden. Der Mark-46-Torpedo der NATO ist der Gefechtskopf der ASROC-Rakete, die gegen U-Boote eingesetzt wird und wird auch von der Seemine Typ Mark 60 CAPTOR verschossen. Der meistverwendete Torpedo, der nur von U-Booten abgeschossen werden kann, ist der amerikanische Mark 48. Auf den neuen deutschen U-Booten der Klasse 212 A kommt der DM2A4 zum Einsatz.
 amerikanischer, deutscher und britischer Torpedo aus dem 2. Weltkrieg (v.o.n.u.)
amerikanischer, deutscher und britischer Torpedo aus dem 2. Weltkrieg (v.o.n.u.)Inhaltsverzeichnis
Wortherkunft
Das lateinische Wort „torpedo“ bedeutet „Zitterrochen“ und ist auch der wissenschaftliche Name dieser Fischgattung. Der lateinische Begriff ist eine Bildung zu „torpere“, das mit „erstarren machen“ übersetzt werden kann. Dieser Name hat nichts mit der Form der Waffe zu tun, sondern damit, dass Zitterrochen „lähmende Schläge“ austeilen können.
Im Sprachgebrauch der Marine wurde der Begriff zuerst vom amerikanischen Ingenieur Robert Fulton benutzt, der ihn 1800 in Zusammenhang mit seinem U-Boot Nautilus für eine nachgeschleppte Sprengladung verwandte, die Schiffe von unten angreifen konnte.
In den allgemeinen Sprachgebrauch ging das Wort "torpedieren" ein, im Sinne von zerstören.
Geschichte
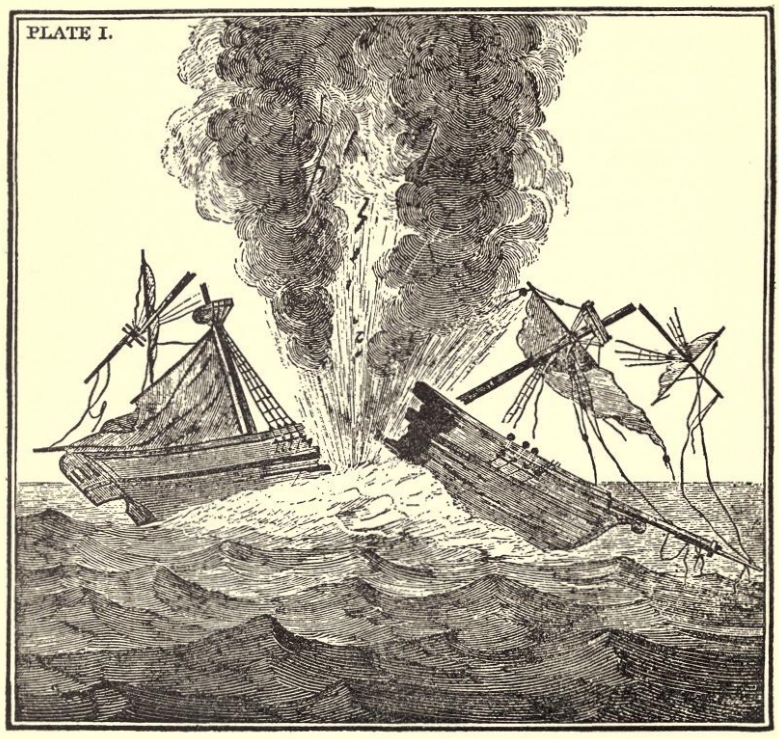
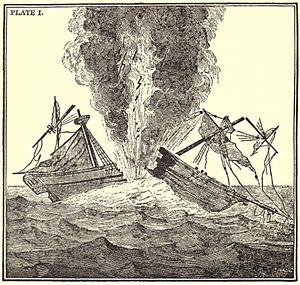 Torpedoversuch 1805, die Brig Dorothea sank innerhalb von zwanzig Sekunden (Robert Fulton)
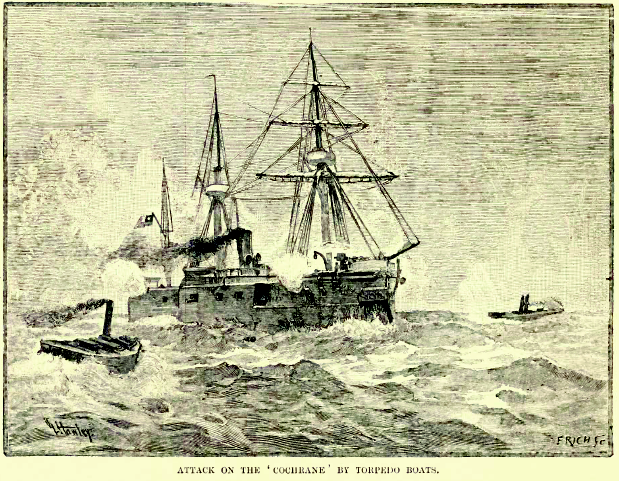
Torpedoversuch 1805, die Brig Dorothea sank innerhalb von zwanzig Sekunden (Robert Fulton)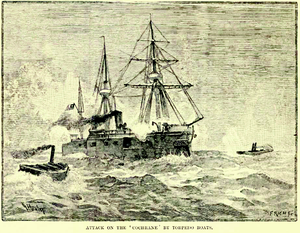 Angriff mit einem Torpedoboot auf das chilenische Schiff Cochrane während des chilenischen Bürgerkriegs von 1891
Angriff mit einem Torpedoboot auf das chilenische Schiff Cochrane während des chilenischen Bürgerkriegs von 1891Der Begriff „Torpedo“ wurde zunächst sehr undifferenziert zur Bezeichnung für alle möglichen Sprengladungen im Wasser, auch Seeminen verwendet. Robert Fulton erwähnt in seinem Buch Torpedo war, and submarine explosions frühe Versuche bei denen am 15. Oktober 1805 das Schiff "Dorothea" durch Torpedoversuche in zwei Hälften gesprengt wurde und innerhalb von zwanzig Sekunden sank.[1] Im weitesten Sinne kann der Spierentorpedo als Vorläufer dessen angesehen werden, was heute unter „Torpedo“ verstanden wird. Während des amerikanischen Bürgerkriegs suchte man nach einer Möglichkeit, Schiffspanzerungen zu überwinden, indem man eine große Sprengladung mittels einer Stange (Spiere) direkt an das feindliche Schiff brachte. Das Funktionsprinzip entsprach ungefähr dem der Petarde. Das erste Unterseeboot, das einen Spierentorpedo einsetzte, war die CSS Hunley, die damit am 17. Februar 1864 die USS Housatonic der Unionstruppen versenkte. Die „Hunley“ sank nach dem Angriff allerdings aus ungeklärten Ursachen selbst.
Die ersten schraubengetriebenen Torpedos wurden von Giovanni Luppis (kroat. Ivan Lupis), einem österreich-ungarischen Marineoffizier italienischer Herkunft, entwickelt und gebaut. Die Schraube wurde dabei durch Federkraft betrieben, die Steuerung erfolgte mittels Seilzügen von Land aus. Die Präsentation erfolgte 1860 in Fiume, an der Nordadria im heutigen Kroatien.
Als Vorbild für Prinzip und Aufbau moderner Torpedos gilt aber der sogenannte Whitehead-Torpedo, der nach seinem Erbauer, dem englischen Ingenieur Robert Whitehead, benannt wurde. Whitehead entwickelte zusammen mit Luppis den Torpedo für die österreichische Marine weiter und führte ihn 1866 in Fiume vor. Dieser Torpedo trug eine 9 kg schwere Sprengladung in der Spitze, hatte eine Reichweite von 300 bis 400 Metern und erreichte eine Geschwindigkeit von 6 Knoten. Als Energiequelle für den Antrieb diente auf 40 kp/cm² verdichtete Luft, die in einem Druckbehälter mitgeführt wurde.
Bei den frühen Bauformen wurden die Stabilisierungsflossen bis in den Bugbereich gezogen, um das Gegenmoment der Antriebsschraube auszugleichen. Wegen dieses charakteristischen Aussehens wurden diese Torpedos auch Fisch-Torpedo genannt. Da modernere Konstruktionen grundsätzlich von zwei gegenläufigen Schrauben angetrieben werden, deren Gegendrehmomente sich aufheben, kommen sie mit vergleichsweise kleinen Steuerflächen aus. Angesichts der geringen Geschwindigkeiten der frühen Torpedos und der Notwendigkeit, sie sehr nah an ihr Ziel zu bringen, sprach man vom Lancieren eines Torpedos, heute dagegen vom Schießen.

Der erste erfolgreiche Einsatz eines Whitehead-Torpedos, bei dem ein Schiff versenkt wurde, fand am 26. Januar 1878 im Hafen von Batum statt. Die russischen Torpedoboote Tschesma (ein 35 cm Whitehead-Torpedo war mit Seilen unter dem Kiel befestigt) und Sinope (der Torpedo wurde aus einem Rohr abgeschossen, das sich auf einem seitlich am Rumpf befestigten Floß befand) unter dem Befehl von Stepan Ossipowitsch Makarow versenkten den türkischen Zolldampfer Intikbah aus einer Entfernung von 70 Metern.
Die Entwicklung des Torpedos mit Eigenantrieb führte zu einer neuen Qualität im taktischen Denken. Ende des 19. Jahrhunderts wurden schnelle Torpedoboote und Zerstörer entwickelt, die wiederum die Entwürfe und Taktiken der großen Kriegsschiffe stark beeinflussten.
Die ersten eingesetzten Torpedos, Geradeausläufer genannt, hielten, einmal abgeschossen, einen geraden Kurs bei, bis sie ihr Ziel trafen oder ihr Treibstoff aufgebraucht war. Moderne Torpedos verfügen dagegen meist über eine Kombination aus eigenem akustischem Sensor (Sonar) und einer Fernsteuerung, meist über ein Glasfaserkabel.
Antriebsarten
Die Reichweite und Treffsicherheit von unabhängigen Torpedos hängt wesentlich von ihrem Antrieb ab. Um die Energie für die bis zur Mitte des 20. Jahrhunderts ausschließlich verwendeten Antriebspropeller zu liefern, wurden zu Beginn der Entwicklung verschiedene Antriebsarten erprobt. Es gab Versuche mit Federkraft, Schwungscheiben oder Seilzügen, diese blieben jedoch in ihren Möglichkeiten zu beschränkt. Für lange Zeit stellte sich der Antrieb über Motoren, die durch Gasexpansion (zunächst von Druckluft) betrieben wurden, als der praktikabelste heraus. Davon ausgehend kam es zu vielfachen Weiterentwicklungen. Erst zu Beginn des Zweiten Weltkrieges wurden dann erste elektrisch angetriebene Torpedos einsatzbereit.
In der zweiten Hälfte des 20. Jahrhunderts wurden der Wasserstrahl- und der Raketenantrieb auch für Torpedos entwickelt, diese haben aber bisher den Schraubenantrieb nicht verdrängen können.
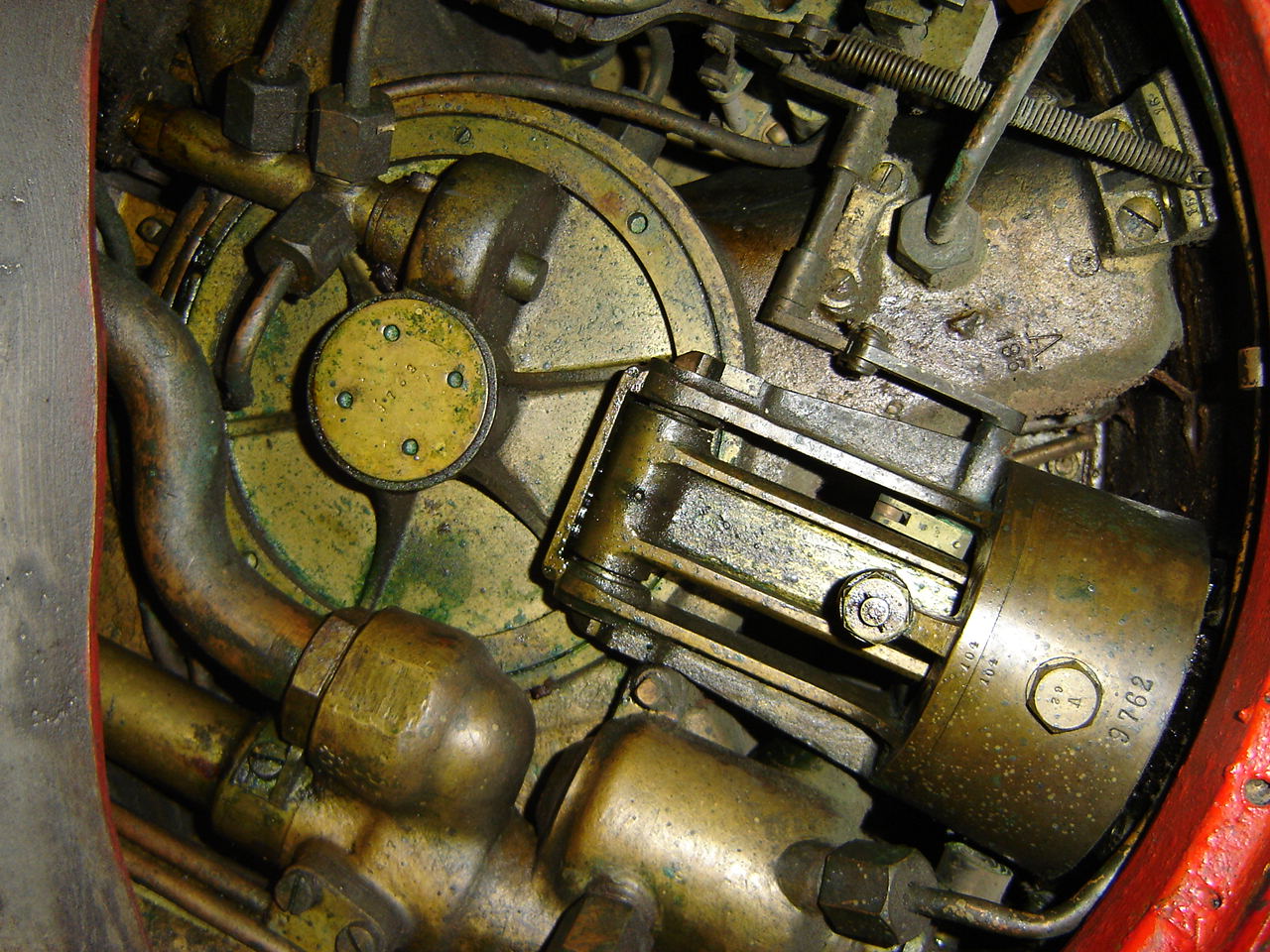
Gasantrieb
 Blick in einen Gasdruckbehälter. Der Gefechtskopf ist abgenommen.
Blick in einen Gasdruckbehälter. Der Gefechtskopf ist abgenommen.Der Gasantrieb bezieht seine Energie aus komprimiertem Gas, das entweder über eine Kolbenkraftmaschine oder über eine Turbine die Propeller antreibt. Die Abgase werden im allgemeinen durch die hohlgebohrte Propellerwelle, selten auch am Torpedokörper selbst ausgestoßen und erzeugen dabei eine von der Wasseroberfläche aus deutlich sichtbare Blasenspur. Diese Systeme sind relativ leicht, einfach und zuverlässig. Die Blasenspur kann jedoch die Laufbahn des Torpedos und die Abschussstelle verraten. Wegen des mit zunehmender Wassertiefe steigenden Umgebungsdrucks des Wassers sind Torpedos mit Gasantrieb kaum zur U-Boot-Jagd geeignet, bei der der Torpedo auch für größere Wassertiefen tauglich sein muss. Auch haben alle nicht inerten Antriebsarten (bei denen der Energieträger – in diesem Falle das Antriebsgas – den Torpedo verlässt) die Eigenart, dass der Torpedo während des Marsches an Gewicht verliert, also entweder Wasser-Äquivalente an Ballastgewicht aufgenommen werden müssen, oder eine Höhensteuerung den Gewichtsverlust und die Schwerpunktveränderung kompensieren muss.
Druckluft
Die ersten selbstangetriebenen Torpedos wurden von reiner Druckluft angetrieben, die auf spezielle Gasexpansionsmotoren wirkte. Im 19. Jahrhundert bestand dabei das Problem, dass Druckbehälter und Kompressoren nicht so weit entwickelt waren, um ausreichend Energie für größere Laufstrecken (mehr als nur einige hundert Meter) zu ermöglichen. Da sich Gase bei der Expansion abkühlen, neigten die Antriebe reiner Drucklufttorpedos zur Vereisung. Um dies zu verhindern wurde Seewasser in die Druckluft gesprüht. Diese Erwärmung der Druckluft brachte auch einen zusätzlichen Leistungsgewinn.
 Britische Torpedos, Zweiter Weltkrieg
Britische Torpedos, Zweiter WeltkriegDampfgas
 Vierzylinder Brotherhood Dampfgasmotor eines deutschen G7a Torpedos
Vierzylinder Brotherhood Dampfgasmotor eines deutschen G7a TorpedosAb dem Ende des 19. Jahrhunderts wurde mit dem Aufkommen kompakter Verbrennungsmotoren aus dem reinen Druckluftantrieb der Dampfgasantrieb entwickelt, der neben dem Elektroantrieb die verbreitetste Antriebsform für Torpedos ist. Der Dampfgasantrieb nutzt üblicherweise ebenfalls Druckluft als Grund-Antriebsmittel, als zusätzlicher Energieträger dient hierbei ein mitgeführter Brennstoff wie Petroleum oder Decalin. Der Brennstoff wird dabei in einer separaten Brennkammer mit der Druckluft vermischt und verbrannt, hierdurch erhöhen sich Druck und Volumen (und damit Energiegehalt) der Luft bzw. der Verbrennungsabgase. („Trockenvorwärmung“, englisch: dryheater) Der Wirkungsgrad wurde später noch weiter erhöht, indem Wasser, nun allerdings zur Kühlung, in den Motor geleitet wird, welches durch Verdampfen wiederum eine Druck- und Volumenerhöhung bewirkte („Nassvorwärmung“, wetheater). Japanische Torpedos im Zweiten Weltkrieg nutzten mit Sauerstoff angereicherte Druckluft, später sogar reinen Sauerstoff als Druckgas und Oxydator.
Verbrennungsmotoren
Ebenfalls technisch machbar (allerdings nur selten in Versuchen genutzt) ist die Einspritzung und Verbrennung des Brennstoffes direkt im Motor, so dass der Antrieb im Grunde ähnlich wie ein Dieselmotor funktioniert.
Gasgeneratoren
Noch während des Zweiten Weltkrieges wurden von den Deutschen verschiedene Varianten des Walter-Antriebs erprobt, u.a. die Nutzung der bei der Zersetzung des Wasserstoffperoxids entstehenden Gase in den üblichen Vierzylinder-Gasexpansionsmotoren (Typ G 7 uk) oder in Turbinen (Typ G 7 ut). Nach dem Zweiten Weltkrieg wurden auch Torpedos mit Gasgeneratoren gebaut, die z. B. durch Aufsprühen von Wasser auf Lithiumblöcke das Medium zum Betrieb einer Gasturbine erzeugen, so etwa der englische Spearfish-Torpedo.
Elektroantrieb
In der Zeit vor dem Zweiten Weltkrieg wurden die ersten Torpedos mit Elektroantrieb entwickelt, die das Problem der verräterischen Blasenbahn beheben sollten. Sie sind auch akustisch schwerer zu orten und in großen Tiefen einsetzbar. Die ersten Elektrotorpedos waren wegen fehlender Hochleistungsakkumulatoren in Spitzengeschwindigkeit und Reichweite noch erheblich eingeschränkt. Die Antriebsenergie lieferten zunächst z. B. Bleiakkumulatoren, deren relativ geringer Energiegehalt, hohes Gewicht und hoher Wartungsaufwand aber nachteilig sind. Der deutsche Torpedo G7e musste während einer Einsatzfahrt immer wieder aus den Rohren gezogen werden um die Akkus nachzuladen, und vor dem Abschuss musste er elektrisch auf 30°C vorgeheizt werden, damit er seine volle Leistung erreichte. Mit dem Fortschreiten der Akkumulatortechnik kamen immer leistungsfähigere Akkuvarianten in Gebrauch und die Leistungsunterschiede der Antriebssysteme verschwanden. Heute sind Silber-Zink-Akkumulatoren die häufigste Akkumulatorenart für Torpedos. Damit erreichen moderne Torpedos mit Elektroantrieb (wie auch Dampfgasantrieb) Geschwindigkeiten bis etwa 55 kn (≈100 km/h).
-

Innenleben eines Torpedos mit Antriebsstange
-

Motor
-

Nahaufnahme Motor
Reaktionsantrieb
Gegen Ende des Zweiten Weltkrieges begannen Forschungen zum reaktiven Antrieb von Torpedos, zunächst mit Walter-Antrieben. Der reaktive Antrieb kommt heute bei einigen Torpedomodellen zum Einsatz, wobei sowohl Feststoff- als auch Flüssigkeitstriebwerke verwendet werden können. Reaktiv angetriebene Torpedos sind verglichen mit den anderen Antriebsarten sehr schnell, haben aber meist eine geringere Reichweite.
Moderne Superkavitationstorpedos (siehe unten) lassen sich nur mit reaktivem Antrieb technisch umsetzen, da Schraubenantriebe nicht die nötige Antriebsleistung erzeugen könnten und in der Dampfblase, die den Torpedo umgibt, auch wirkungslos wären. Bei den reaktiven Antrieben werden übliche Raketentreibstoffe verwendet, es gibt jedoch Forschungen, die den Einsatz metallischer Treibstoffe bei Superkavitationstorpedos zum Ziel haben. Denkbar wäre z. B. eine Kombination von Aluminiumpulver und Wasser oder Wasserdampf. Metallische Treibstoffe haben einen höheren Energiegehalt und erzeugen einen höheren spezifischen Impuls als auf Kohlenwasserstoffen oder Wasserstoff basierende Treibstoffe. Problematisch sind jedoch die hohen Verbrennungstemperaturen und die hohe Erosionsbelastung der Antriebsdüse durch die Verbrennungsprodukte.
Andere Probleme wie Lenkung und Lagersicherheit / Waffensicherheit scheinen weitgehend gelöst. Im Gegensatz zum herkömmlichen Torpedo kommt eine Lenkung über eigenen Sonar vermutlich nicht in Frage, auch bei der Drahtlenkung dürften die technischen Fragen überwiegen. Eine programmierte Kurssteuerung ist dagegen machbar und dank der Geschwindigkeit auch umsetzbar.
Lenkbarkeit
Tiefensteuerung
Das erste zu lösende Problem bei den autonom laufenden Torpedos war die sichere Einhaltung der vorgesehenen Tiefe. Wenn ein Torpedo zu dicht unter der Oberfläche läuft, besteht die Gefahr in den Bereich des Seeganges (also in den Einfluss der Wellen) zu kommen. Der hierdurch möglicherweise erzeugte seitliche Versatz kann die Reichweite extrem verkürzen, da jede Kurskorrektur durch die Ruder einen Eingriff in die ideale Hydrodynamik darstellt und den Torpedo abbremst. Beim Durchbruch durch die Oberfläche würde Luft von der Schraube angesaugt werden und durch den augenblicklichen Wegfall des Widerstandes der Motor hochdrehen. Außerdem ist ein durch die Oberfläche brechender Torpedo vom angegriffenen Schiff leicht erkennbar so dass Abwehrmaßnahmen ergriffen werden können. Daher ist es sinnvoll, Torpedos möglichst tief zu schießen. Allerdings steigt dabei das Risiko des Verfehlens, d. h. des Unterlaufens des Zieles ohne Treffer.
Bedeutsam ist natürlich auch die erzielbare Waffenwirkung (siehe unten), die bei Handelsschiffen und militärischen Einheiten unter anderem von der Statik des Schiffes sowie seiner Panzerungsverteilung abhängt und die Trefferzone (in diesem Fall die Einschlaghöhe) vorgibt. In der Regel ist aber ein Leck weit unterhalb der Wasserlinie schwerer abzudichten und die Panzerung von Kriegsschiffen im Bereich der Wasserlinie am stärksten.
Zur Tiefensteuerung werden meist Druckmessgeräte verwendet, die anhand der Differenz zwischen dem Innendruck des Torpedos und dem des umgebenden Wassers die Tiefe steuern. Unterseebootjagdtorpedos müssen hingegen ein vorgegebenes Suchprogramm mit wechselnden Tiefen ablaufen, um ihr Ziel zu orten und dann selbständig anzugreifen.
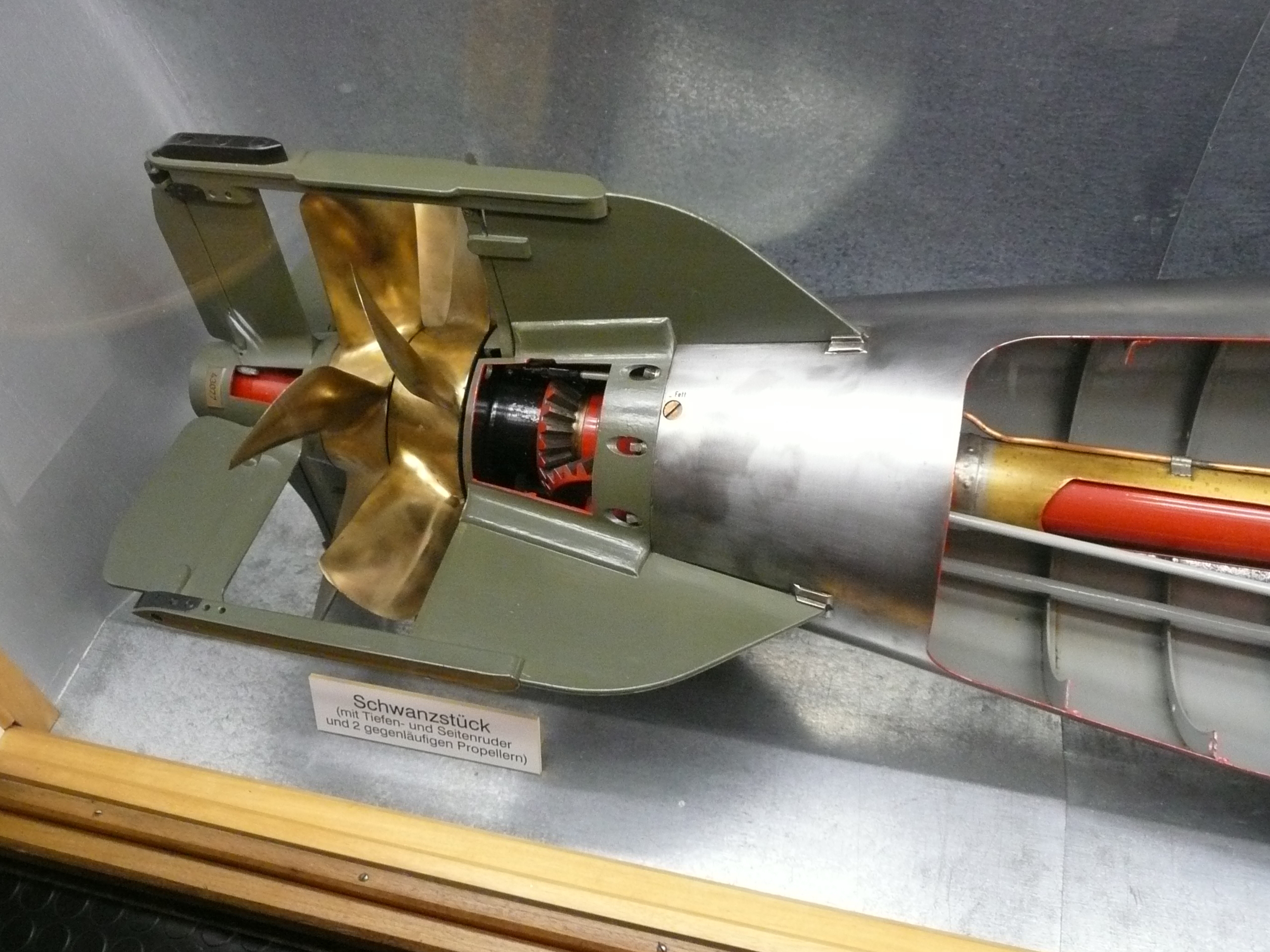
Stabilisierung
 Antrieb mit gegenläufigen Propellern und steuerbaren Flossen
Antrieb mit gegenläufigen Propellern und steuerbaren FlossenWeiterhin stellte sich das Problem, den Torpedo auf einem geraden Kurs zu halten und das Drehmoment der Antriebsschraube auszugleichen, damit der Rumpf sich nicht um seine Längsachse zu drehen beginnt. Dies versuchte man mit mäßigem Erfolg in ersten Varianten durch große, starre Leitflossen zu verhindern. Erst die Verwendung zweier gegenläufiger, koaxialer Schrauben führte dazu, dass sich die Drehmomente beider Schrauben insgesamt gegenseitig aufhoben, der Torpedo konnte nun allein durch die Schwerpunktlage um seine Längsachse stabil gehalten werden.
Der Geradeauslauf war zunächst ebenfalls ein großes Problem. Ursprünglich gab es hierzu keine Regelung. Für jeden einzelnen Torpedo mussten in umfangreichen Versuchen die Ruder so eingestellt werden, dass der Torpedo die eingeschlagene Richtung beibehielt. Einflüsse von außen (z.B. Seegang, Wellenschlag) konnten den Torpedo dennoch aus seiner Richtung ablenken. Erst mit der Nutzung des von Ludwig Obry entwickelten Gyroskops konnte ab 1895 ein geregelter Geradeauslauf erreicht werden. Die eingebauten Kreisel ermöglichten es, in Verbindung mit steuerbaren Flossen Abweichungen von der Schussrichtung aktiv auszugleichen.
Automatiken
Die ersten Torpedos mussten als reine „Geradeausläufer“ von der abschießenden Plattform auf ihr Ziel gerichtet werden. Sichere Treffer setzten eine genaue Ausrichtung des schießenden Fahrzeugs und erfahrungsgemäß Entfernungen von nur wenigen hundert Metern, nach Einführung der Kreiselsteuerungen unter 1 km voraus.
Später wurde es möglich, eine Kursänderung nach dem Abschuss vorzuprogrammieren, z.B. um aus parallelen Torpedorohren gleichzeitig mehrere Torpedos abschießen zu können, die dann unterschiedliche Kurse laufen („Torpedofächer“).
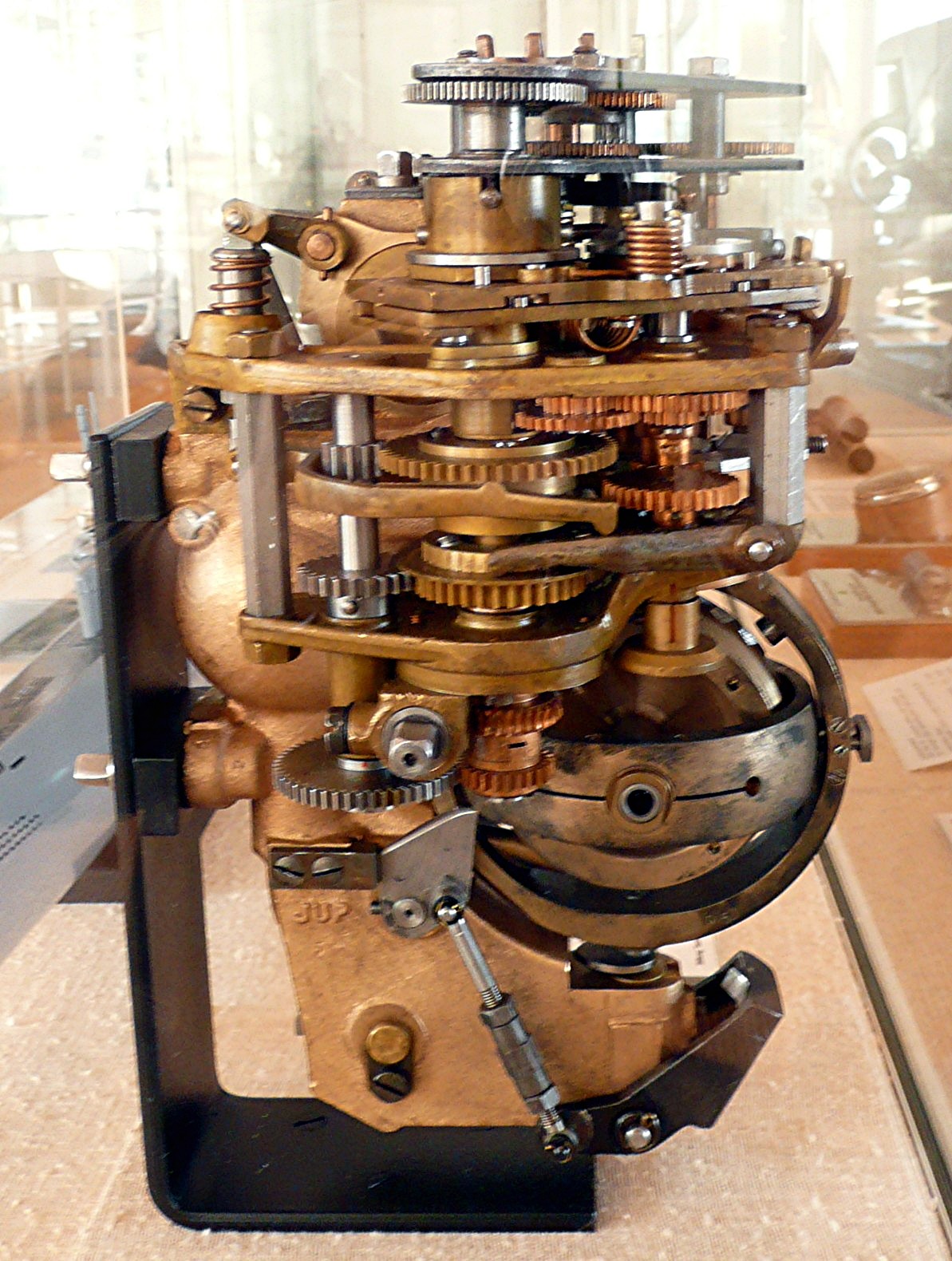
Programmläufer
 Steuereinheit eines FAT
Steuereinheit eines FATUnter dem Druck der immer besseren Unterwasserortung entwickelte vor allem die deutsche Kriegsmarine im Zweiten Weltkrieg verschiedene mechanische Automatismen zur Steuerung von U-Boottorpedos, damit die angreifenden Boote aus möglichst großer Entfernung treffen konnten.
Die einfachste war dabei der sogenannte Flächen-Absuch-Torpedo oder Federapparat-Torpedo (FAT), der am Ende einer voreingestellten Laufstrecke in einem vorher festgelegten Muster Richtungsänderungen durchführte, um seine Trefferchancen gegen Geleitzugformationen zu erhöhen. Dabei fuhr er so lange im „Zick-Zack“ oder Schleifen bis er etwas traf oder keine Energie mehr hatte.
Die nächste Entwicklung war der so genannte lageunabhängige Torpedo (LUT), der es ermöglichte, auch auf Ziele, welche sich seitlich und theoretisch auch hinter dem Boot befanden, zu feuern.
Zielsuche
Während die ersten Geradeausläufer wie auch die Programmläufer nach dem Abschuss nicht mehr beeinflusst wurden, wurden bereits während des Zweiten Weltkrieges Verfahren entwickelt, die eine Selbststeuerung des Torpedos auf das Ziel ermöglichen sollten. Hierbei waren sowohl passive Verfahren (der Torpedo „hört“ nur und steuert sich auf die Schallquelle, z.B. die Schraubengeräusche ein) als auch aktive Verfahren möglich (der Torpedo erzeugt selbst Schallwellen und steuert sich auf das vom Ziel reflektierte Echo ein).
Der erste wirklich selbstsuchende Torpedo war auf deutscher Seite der akustisch gelenkte G7e T IV „Falke“, der im März 1943 erprobt wurde. Eine Verbesserung war der so genannte „Zaunkönig“ (G7es T V), der ab September des Jahres auf U- und Schnellbooten eingesetzt wurde. Alliiertes Gegenstück war der Mark 24 („FIDO“, „Wandering Anne“), der ebenfalls im März 1943 zur Verfügung stand und im Gegensatz zum „Zaunkönig“ zum Abwurf von Flugzeugen und zur U-Jagd entwickelt wurde. Diese ersten Automatiken waren zum Teil mechanisch oder hatten eine aus heutiger Sicht sehr beschränkte Elektronik. Heute verfügen Torpedos zum Teil sogar über aktive Sonarortung und über mikroprozessorgesteuerte Zielsuchprogramme, die eine Zielverfolgung in drei Dimensionen und das Erkennen von Abwehrmaßnahmen ermöglichen.
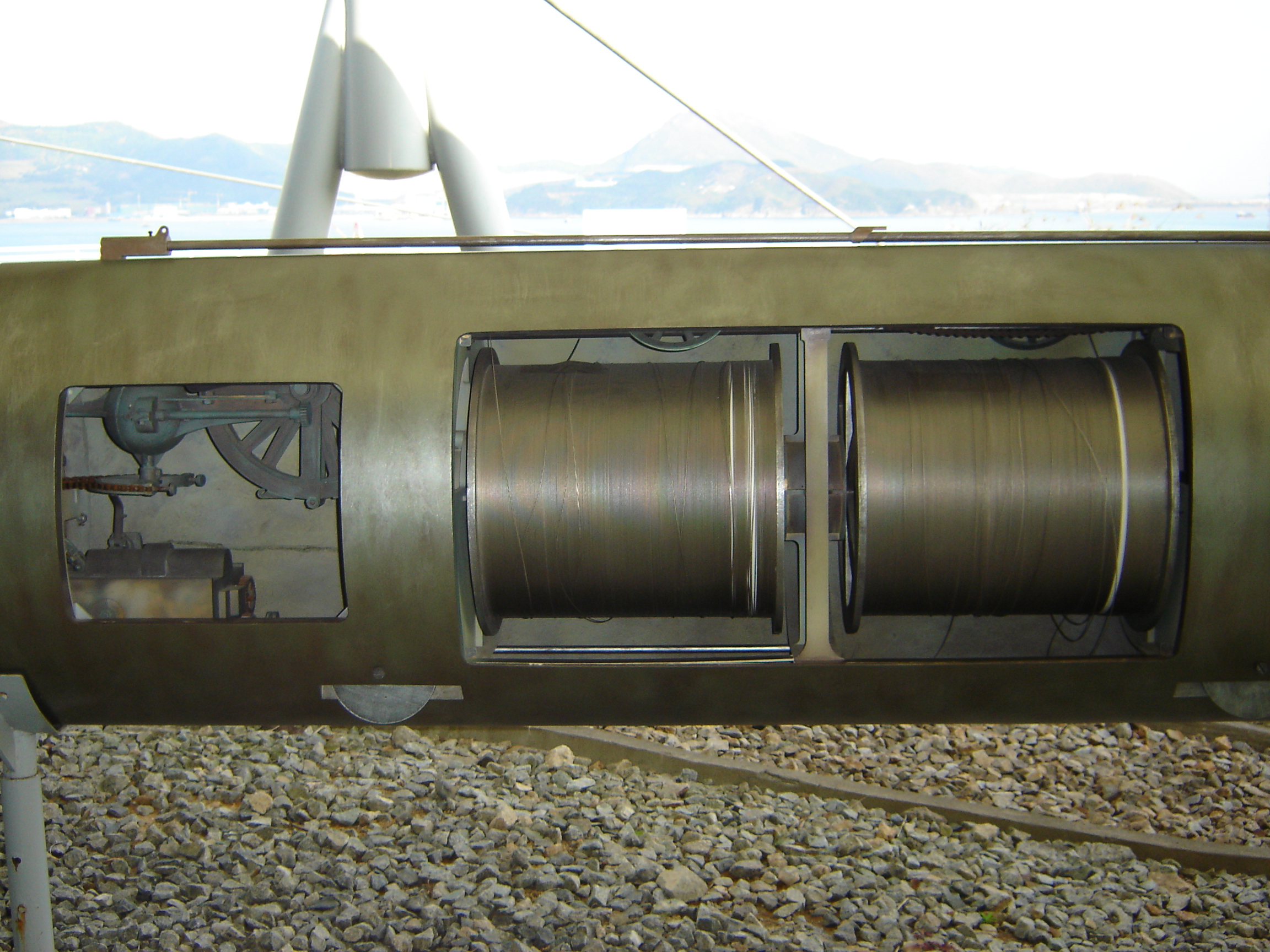
Fernsteuerung
 Spulen mit Steuerdrähten des Brennantorpedos von Louis Brennan 1877 patentiert
Spulen mit Steuerdrähten des Brennantorpedos von Louis Brennan 1877 patentiertDer Kurs des Torpedos lässt sich heute üblicherweise auch aus dem abschießenden Fahrzeug beeinflussen. Damit kann der Torpedo z. B. entsprechend den Ergebnissen der Radar- oder Sonarortung des lenkenden Fahrzeugs Ausweichbewegungen des Zieles nachgesteuert werden. Zu diesem Zweck zieht der Torpedo einen dünnen Steuerdraht oder Lichtleiter hinter sich her. Damit lassen sich auch Befehle wie Notabschaltung und vorzeitige Detonation an den Torpedo übermitteln – ein bedeutender Vorteil, sollte der Torpedo unerwartet wenden und das eigene Boot als Ziel auffassen.
Fehlfunktionen der Torpedolenkung und andere Störungen
Es gibt verschiedene charakteristische Fehlfunktionen der Torpedolenkung. Bei Versagen der Tiefensteuerung kann der Torpedo als Oberflächenläufer an die Wasseroberfläche kommen und weiterlaufen. Er ist dann nur noch begrenzt seitensteuerfähig, kann an Geschwindigkeit verlieren und kann vom Ziel aus entdeckt und eventuell bekämpft werden. Das Gegenteil zum Oberflächenläufer ist der Grundgänger. Beim Grundgänger steuert der Torpedo ungebremst nach unten, bis er auf den Meeresgrund trifft oder vom Wasserdruck zerstört wird.
Beim Versagen der Seitensteuerung stellen Kreisläufer eine erhebliche Gefahr für das schießende Fahrzeug dar. Beim Kreisläufer führt die Fehlsteuerung dazu, dass der Torpedo einen Kreis abläuft und sich wieder der Position des abschießenden Fahrzeugs nähert. Um dieser Gefährdung zu begegnen, verfügen moderne Torpedos über einen Sicherheitsmechanismus, der sie bei einer Kursänderung von 180° deaktiviert.
Bei Aufschlagzündern wurde die Zündersicherheit teils durch eine im Wasserstrom abfallende Schutzkappe sichergestellt. Da die Explosion des Torpedos das eigene Schiff/Boot gefährdet, werden Zünder auch heute erst ab einer gewissen Laufstrecke bzw. Entfernung geschärft.
Waffenwirkung
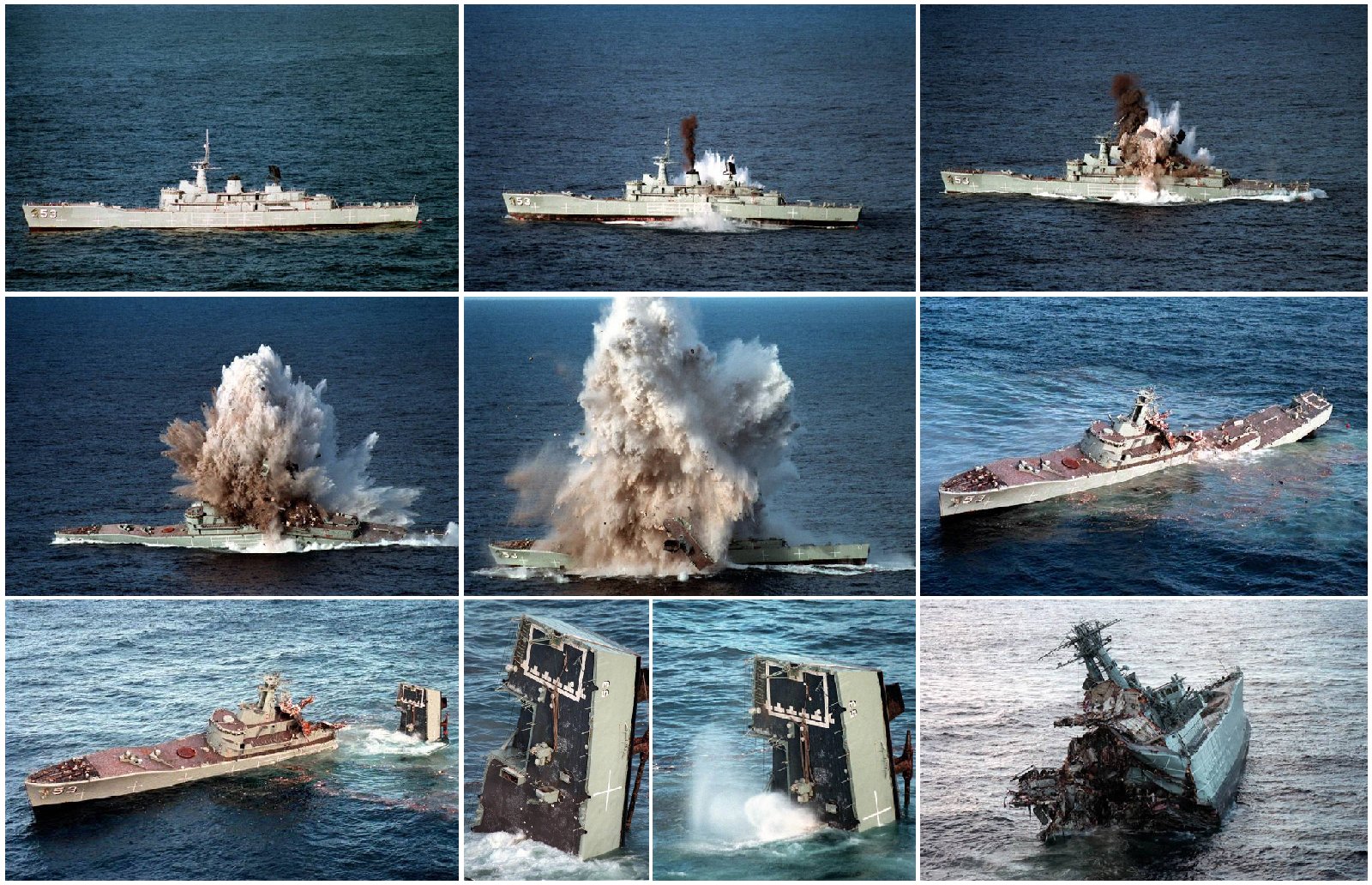
 Torpedotest
Torpedotest Torpedotreffer auf ein Handelsschiff im Pazifikkrieg
Torpedotreffer auf ein Handelsschiff im PazifikkriegDas Funktionsprinzip des Torpedos ist bis heute weitgehend gleich geblieben, wenngleich moderne Torpedos einige Komponenten mehr besitzen als frühe Bauformen. So weisen Torpedos auch heute noch eine Zigarrenform auf und schwimmen beim Angriff auf Oberflächenschiffe knapp unter der Wasseroberfläche, um ein Loch in die Bordwand unterhalb der Wasserlinie zu sprengen und damit das Ziel zum Sinken zu bringen. Dies wird durch Aufschlagzünder erreicht, die den im Kopf des Torpedos befindlichen Sprengstoff zur Explosion bringen.
Bei Explosion direkt auf dem Ziel geht allerdings ein Teil des Explosionsdrucks in den Hohlraum des Schiffes verloren. Darum wurden Abstandszünder entwickelt oder der Sprengsatz von der Spitze weiter nach hinten im Torpedo verlegt. Durch die dann entstehende Druckwelle im unelastischen Wasser wird der Schaden an ungepanzerten Schiffen trotz des Abstandes erheblich größer.
Alternativ versucht man, Torpedos unter dem Boden des Zieles zu zünden. Dazu wurden Magnetzünder entwickelt, die auf die typischen Veränderungen des Erdmagnetfeldes reagieren, welche die Stahlmasse eines Schiffes verursacht. Wenn der Torpedo beim Unterlaufen des Schiffes explodiert, wird es zunächst durch die Druckwelle getroffen, dann verliert das Schiff durch die expandierende Gasblase an dieser Stelle den Auftrieb und bricht auseinander.
Sowohl Amerikaner als auch Deutsche hatten zu Beginn des Zweiten Weltkrieges unter anderem Probleme mit den gerade neu entwickelten Magnetzündern und der Tiefensteuerung ihrer Torpedos. Diese Phase ging in die Geschichte ein als Torpedoskandal (USA) bzw. Torpedokrise (Deutschland).
Den jeweiligen Problemen lagen Fehler in der Entwicklung, Fertigung und Handhabung zu Grunde. Allerdings war die exakte Steuerung von Magnetzündern mit der damaligen Technik auch extrem schwierig zu realisieren. Das führte zu einer Vielzahl von Misserfolgen besonders der U-Bootwaffe der beiden Marinen und zu einem zeitweiligen Verzicht auf die neuentwickelte Technik.
Technische Probleme mit der Torpedosicherheit haben auch in jüngerer Zeit zu schweren Unfällen geführt. So ist der Verlust des russischen Atom-U-Boots K-141 Kursk am 12. August 2000 vermutlich auf einen defekten Torpedo zurückzuführen. Gleiches gilt für das US-Atom-Uboot USS Scorpion (SSN-589), das am 22. Mai 1968 mit hoher Wahrscheinlichkeit durch die Fehlfunktion eines eigenen Torpedos zerstört wurde.
 Ein Boot der Virginia-Klasse schießt einen Torpedo (Grafik)
Ein Boot der Virginia-Klasse schießt einen Torpedo (Grafik)Abgesehen von der Wasserbombe ist der Torpedo die einzige Waffe zur aktiven Bekämpfung getauchter U-Boote. Der Angriff auf ein getauchtes gegnerisches U-Boot erfolgt in der Regel in großer Tiefe. Moderne Torpedos erreichen Wassertiefen von etwa 750 Metern. Um ein feindliches U-Boot, das sich in allen drei Dimensionen bewegen kann, zu orten, besitzen heutige Torpedos aktive und passive Sonardetektoren in ihrer Spitze. Die empfangenen Signale werden von einem meist in der Mitte des Torpedos befindlichen Computer ausgewertet und daraus Befehle für die Steuerflossen am Ende des Torpedos zur Richtungsänderung abgeleitet. Zum Durchdringen der gepanzerten doppelten Hüllen großer Atom-U-Boote wurden spezielle Gefechtsköpfe entwickelt.
Neben Torpedos mit konventionellem Sprengkopf werden seit dem Kalten Krieg auch Torpedos mit Atomsprengkopf gebaut. Speziell die UdSSR hoffte, damit im Kriegsfall die amerikanischen Trägerkampfgruppen möglichst effektiv ausschalten zu können, da sie in diesem Bereich der maritimen Kriegsführung den Amerikanern deutlich unterlegen waren, während ihre U-Boot-Flotte deutlich stärker war.
Neueste Entwicklungen
Die neueste Entwicklung stellen Torpedos mit Superkavitationsblase und Raketenantrieb durch eine Feststoffrakete dar, die mindestens 200 Knoten schnell sind. Während erste Versuche mit Strahlantrieb auf deutscher Seite bereits während des Zweiten Weltkrieges stattfanden, spielte die sowjetische Marine bzw. Waffentechnik hier die eigentliche Vorreiterrolle. 1977 stellte sie den ersten einsatzfähigen Superkavitationstorpedo (Schkwal) in Dienst.
Diese Torpedos besitzen nach Beschreibungen und publizierten Fotos an der Spitze eine abgeplattete Fläche. An den Kanten der Fläche bildet sich, nach hinten abgehend, die eigentliche Kavitationsblase, unterstützt und erweitert durch die Umleitung von Abgasen. Die Lenkung geschieht durch die steuerbare Fläche an der Spitze, durch seitliche Finnen und eventuell durch den Strahlantrieb selbst.
Die ersten Schkwal-Torpedos waren ungelenkt und für konventionelle und nukleare Sprengköpfe vorgesehen. Auch spätere Schkwal-Torpedos und das Exportmodell Schkwal E sind nicht zielsuchend, die Zieldaten müssen vor dem Abschuss in den Autopilot des Torpedos einprogrammiert werden. Sie besitzen konventionelle Sprengköpfe mit 210 kg TNT. Es wird von moderneren Varianten des Schkwal-Torpedos berichtet, die sich zielsuchend oder zumindest ferngelenkt bewegen.
Eine weitere Entwicklung in diese Richtung ist der deutsche Superkavitationstorpedo der Firma Diehl BGT Defence.
Museale Rezeption
Im Heeresgeschichtlichen Museum in Wien, in welchem die Geschichte der k.u.k. Kriegsmarine im Detail dokumentiert ist, befindet sich einer jener ersten Torpedos, welcher von Robert Whitehead in Zusammenarbeit mit dem österreichischen Fregattenkapitän Johann Luppis entwickelt wurde. Er hat eine Länge von 3,35 m und einen Durchmesser von 35 cm, gilt als erster funktionsfähiger Torpedo der Marinegeschichte und wurde von fast allen Kriegsmarinen übernommen. In der Dauerausstellung sind noch weitere Torpedomodelle ausgestellt, darunter auch ein im technischen Detail hervorragend ausgearbeitetes Schnittmodell.[2]
Literatur
- Manfred Schiffner, Karl-Heinz Dohmen, Ronald Friedrich: Torpedobewaffnung, 2. Auflage, Militärverlag der Deutschen Demokratischen Republik, Berlin 1990, ISBN 3-327-00331-9.
- Edwyn Gray: Die teuflische Waffe. Geschichte und Entwicklung des Torpedos (Originaltitel: The Devil’s Device, Robert Whitehead and the History of the Torpedo, Seeley, London 1975 / Naval Institute Press, Annapolis, MD 1991 (revidierte und aktualisierte Auflage), ISBN 978-0-87021-245-1, übersetzt von Hilde Bertsch), Stalling, Oldenburg / Hamburg 1975, ISBN 3-7979-1858-5.
Siehe auch
Einzelnachweise
- ↑ Robert Fulton, Torpedo war, and submarine explosions, William Elliot, New York, 1810, [1] Seiten 177 ff. (engl. eingesehen am 25. Februar 2011)
- ↑ Manfried Rauchensteiner, Manfred Litscher (Hg.): Das Heeresgeschichtliche Museum in Wien. Graz, Wien 2000 S. 91.
Weblinks
 Commons: Torpedoes – Sammlung von Bildern, Videos und Audiodateien
Commons: Torpedoes – Sammlung von Bildern, Videos und Audiodateien Wiktionary: Torpedo – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Torpedo – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen- Rijeka Torpedofabrik, (Englisch)
-









Wikimedia Foundation.