- Streifenprojektion
-
Das Streifenprojektionsverfahren, das manchmal auch als Streifenlichttopometrie bezeichnet wird, fasst eine Gruppe optischer Messmethoden zusammen, bei der Bildsequenzen zur dreidimensionalen Erfassung von Oberflächen verwendet werden.
Inhaltsverzeichnis
Prinzip
Aufbau eines Sensors
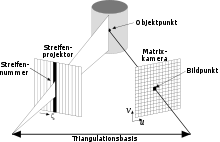 Prinzip eines Streifenprojektionssensors
Prinzip eines Streifenprojektionssensors
Ein Streifenprojektionssensor besteht aus mindestens einem Musterprojektor, der vom Prinzip einem Diaprojektor ähnelt, sowie aus mindestens einer digitalen oder analogen Videokamera. Bei kommerziellen Systemen haben sich mittlerweile Aufbauten mit einem Projektor und ein oder zwei Kameras etabliert.
Ablauf einer Messung
Der Projektor beleuchtet das Messobjekt zeitlich sequentiell mit Mustern von parallelen hellen und dunklen Streifen unterschiedlicher Breite. Die Kamera(s) registrieren das projizierte Streifenmuster unter einem bekannten Blickwinkel zur Projektion. Für jedes Projektionsmuster wird mit jeder Kamera ein Bild aufgenommen. Für jeden Bildpunkt aller Kameras entsteht so eine zeitliche Folge von unterschiedlichen Helligkeitswerten.
Berechnung der Oberflächenkoordinaten
Die gesuchten dreidimensionalen Koordinaten der Oberfläche werden in zwei Schritten berechnet.
Bestimmung der Projektorkoordinate
Zu einem gegebenen Objektpunkt sind die Bildkoordinaten im Kamerabild bekannt. Der Projektor entspricht einer umgekehrten Kamera. Aus der Folge von Helligkeitswerten, die aus der Bildsequenz für jeden Kamerabildpunkt gemessen wurden, kann die Nummer des Streifens berechnet werden. Im einfachsten Fall erfolgt das über einen Binärkode (z.B. einen Gray-Code) der die Nummer des Streifens als diskrete Koordinate im Projektor kennzeichnet. Eine höhere Genauigkeit ist mit dem sogenannten Phasenschiebeverfahren zu erreichen, da es eine nicht diskrete Koordinate bestimmen kann. Es kann entweder als Ergänzung eines Gray-Codes oder als absolut messendes Heterodynverfahren eingesetzt werden.
Vorwärtseinschnitt
Die Streifennummer im Projektor entspricht der Bildkoordinate in der Kamera. Die Streifennummer spezifiziert eine Lichtebene im Raum, die Bildkoordinate einen Lichtstrahl. Bei bekannter Kamera- und Projektorposition kann der Schnittpunkt der Ebene und der Gerade berechnet werden. Das ist die gesuchte dreidimensionale Koordinate des Objektpunktes im Koordinatensystem des Sensors. Die geometrische Lage aller Bildstrahlen muss genau bekannt sein. Die exakte Berechnung der Strahlen erfolgt mit dem aus der Photogrammetrie bekannten Vorwärtsschnitt.
Kalibrierung
 Strahlgeometrie einer Lochkamera
Strahlgeometrie einer LochkameraWichtig für die Berechnung der Koordinaten und die garantierte Genauigkeit der Ergebnisse ist eine präzise Kalibrierung der Abbildungseigenschaften. Alle Abbildungseigenschaften von Projektoren und Kameras werden mit Hilfe eines mathematischen Modells beschrieben. Als Basis dient eine einfache Lochkamera, bei der alle Bildstrahlen vom Objektpunkt im dreidimensionalen Raum durch einen gemeinsamen Punkt, das Projektionszentrum, laufen und in den zugehörigen Bildpunkt auf dem Sensor oder Film abgebildet werden.
Zusätzlich müssen die in diesem Modell nicht idealen Eigenschaften von realen Linsensystemen, die in Verzerrungen des Bildes resultieren, durch eine Verzeichnungskorrektur angepasst werden.
Die genannten Parameter der Lochkamera sowie ihre Lage und Orientierung im Raum werden aus einer Serie von Kalibrieraufnahmen mit photogrammetrischen Methoden insbesondere mit einer Bündelausgleichsrechnung bestimmt.
Eine einzelne Messung mit dem Streifenprojektionssensor ist in ihrer Vollständigkeit durch die Sichtbarkeit der Objektoberfläche eingeschränkt. Damit ein Punkt der Oberfläche erfasst werden kann, muss er vom Projektor beleuchtet und von den Kameras beobachtet werden. Punkte, die beispielsweise auf der Rückseite des Objektes liegen, müssen in einer separaten Messung unter einem anderen Blickwinkel des Sensors erfasst werden.
Für ein komplexes Objekt können sehr viele (einige hundert) Einzelmessungen für die komplette Erfassung notwendig sein. Damit man die Ergebnisse aller Messungen in ein gemeinsames Koordinatensystem zusammenführen kann, sind folgende Methoden gebräuchlich: das Anbringen von punktförmigen Markern auf dem Objekt, das Matching von Objektmerkmalen, oder die genaue Messung der Sensorposition mit einem zusätzlichen Messsystem. Dieser Prozess wird als Navigation bezeichnet.
Genauigkeit
Die erreichbare Messgenauigkeit ist proportional zur dritten Wurzel aus dem Messvolumen. Kommerzielle Systeme erreichen Genauigkeiten von 0,005 mm bis 0,3 mm je nach technischem Aufwand und Messvolumen.
Anwendungen
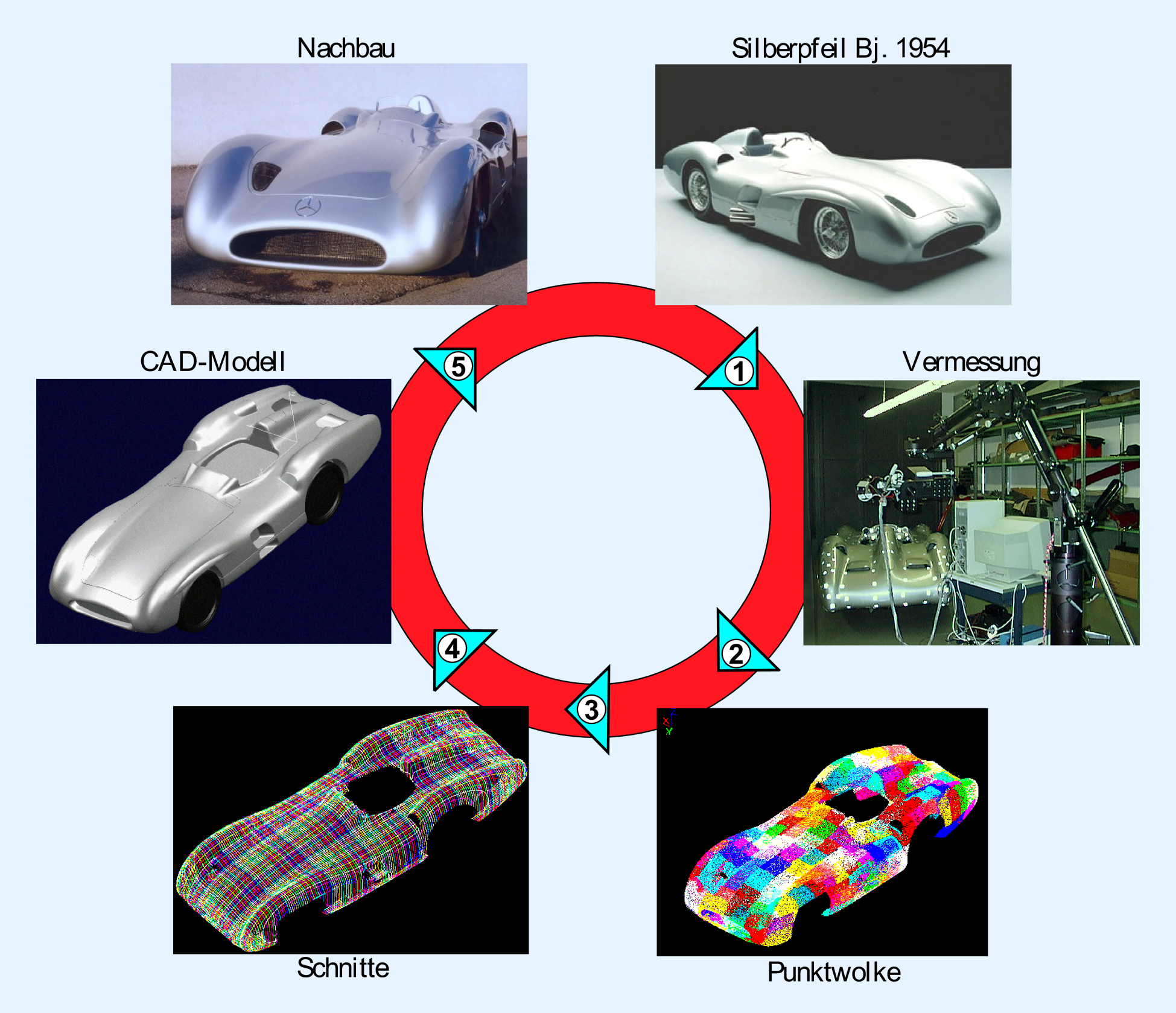
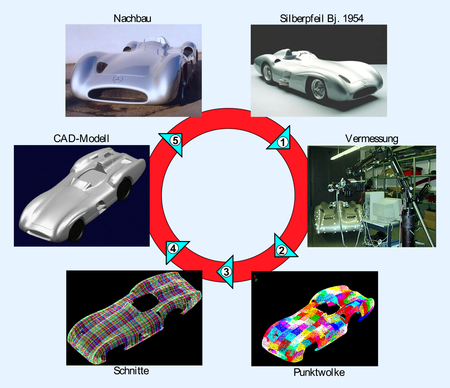 Der Reverse-Engineering-Prozess am Beispiel eines Silberpfeil Rennwagens.
Der Reverse-Engineering-Prozess am Beispiel eines Silberpfeil Rennwagens.Neben Anwendungen in der Medizin, Zahntechnik und Pathologie werden Streifenprojektionssensoren hauptsächlich in der Industrie, im Designprozess für neue Produkte (Reverse Engineering) und bei der Formkontrolle von Werkstücken und Werkzeugen (Soll-Ist-Vergleich) verwendet. Mit mehreren tausend in Deutschland installierten Systemen (geschätzter Stand April 2005) sind sie in der Automobil- und Flugzeugindustrie sehr weit verbreitet und stellen in vielen Anwendungsfällen eine bevorzugte Alternative zu mechanischen Koordinatenmessgeräten dar.
Reverse Engineering
Das nebenstehende Beispiel erläutert den Reverse-Engineering-Prozess am Beispiel eines historischen Rennwagens: Der Silberpfeil W196, Baujahr 1954. Vom Original (1) wurde in 14 Stunden Messzeit eine Punktewolke (2) mit 98 Millionen Messpunkten erzeugt. Diese wurden auf achsparallele Schnitte im Abstand von zwei Zentimetern reduziert (3), auf denen in etwa 80 Arbeitsstunden ein CAD-Modell (4) konstruiert wurde. Auf Basis des CAD-Modells wurde schließlich ein Nachbau (5) im Maßstab 1:1 angefertigt, der heute im Mercedes-Benz Museum in Stuttgart-Untertürkheim zu besichtigen ist.
Wunddokumentation
Die Wunddokumentation mittels Streifenlichttopometrie zeigt sich gegenüber allen in der gerichtsmedizinischen Praxis angewandten abbildenden Verfahren als überlegen, da sie die räumliche, metrisch exakte Darstellung mit realistischen Farben einzelner relevanter Punkte einer Verletzung ermöglicht. Das Resultat ist ein "digitaler Wundenmensch" und erlaubt die Objektivierung der äußeren Leichenschau.
Referenzen
- Klaus Körner, Ulrich Droste: Tiefenscannende Streifenprojektion (DSFP) University of Stuttgart
- Fringe 2005, The 5th International Workshop on Automatic Processing of Fringe Patterns Berlin: Springer, 2006. ISBN 3-540-26037-4 ISBN 978-3-540-26037-0
- Christian Kohler, Klaus Körner: Streifentriangulation mit räumlichen Lichtmodulatoren (University of Stuttgart)
- Hof, C., Hopermann, H.: Comparison of Replica- and In Vivo-Measurement of the Microtopography of Human Skin University of the Federal Armed Forces, Hamburg
- Frankowski, G., Chen, M., Huth, T.: Real-time 3D Shape Measurement with Digital Stripe Projection by Texas Instruments Micromirror Devices (DMD) Proc. Of SPIE-Vol. 3958(2000), pp. 90 – 106
- W. Wilke: Segmentierung und Approximation großer Punktwolken (Dissertation Univ. Darmstadt, 2000)
- Frankowski, G., Chen, M., Huth, T.: Optical Measurement of the 3D-Coordinates and the Combustion Chamber Volume of Engine Cylinder Heads Proc. Of "Fringe 2001", pp. 593 – 598
- G. Wiora: Optische 3D-Messtechnik Präzise Gestaltvermessung mit einem erweiterten Streifenprojektionsverfahren (Dissertation Univ. Heidelberg, 2001)
- Peng, T. , Gupta, S.K., Lau. K. : Algorithms for constructing 3-D point clouds using multiple digital fringe projection patterns. CAD Conf., Bangkok, Thailand, June 2005
- Song Zhang, Peisen Huang: High-resolution, Real-time 3-D Shape Measurement (PhD Dissertation, Harvard Univ., 2005)
- Elena Stoykova, Jana Harizanova, Venteslav Sainov: Pattern Projection Profilometry for 3D Coordinates Measurement of Dynamic Scenes. In: Three Dimensional Television, Springer, 2008, ISBN 978-3-540-72531-2
Weblinks
- Bremer Institut für angewandte Strahltechnik - Optische Messtechnik
Kategorie:- Optische Messtechnik

Wikimedia Foundation.