- Synchronmotor
-
Ein Synchronmotor ist eine Synchronmaschine im Motorbetrieb, bei der ein konstant magnetisierter Läufer (Rotor) synchron von einem bewegten magnetischen Drehfeld im umgebenden Stator mitgenommen wird. Der laufende Synchronmotor hat eine zur Wechselspannung synchrone Bewegung – die Drehzahl ist also über die Polpaarzahl mit der Frequenz der Wechselspannung verknüpft.
 Bewegungsschema eines Drehstrom-Synchronmotors.
Bewegungsschema eines Drehstrom-Synchronmotors.
Inhaltsverzeichnis
Aufbau und Funktion
Das Feld im Läufer wird durch Permanentmagnete (Selbsterregung, z.B. magnetisierter Ferrit-Zylinder als Läufer) oder Elektromagnete (Fremderregung mit Feldspule auf dem Läufer, Stromzufuhr über Schleifringe) erzeugt. Die Statorspulen werden insbesondere bei großen Synchronmaschinen manchmal durch einen Frequenzumrichter mit einem passenden, gesteuerten Wechselstrom betrieben. Damit sind drehzahlvariable Antriebe großer Leistung realisierbar.
Im Normalbetrieb tritt beim Synchronmotor kein Schlupf auf. Bei Belastung eilt das Läufermagnetfeld dem Statormagnetfeld um einen bestimmten Winkel (Polradwinkel) nach, welcher mit steigender Belastung zunimmt. Dies ist aber nur bis zu einem maximalen Moment möglich, bei dem der Winkel 90° beträgt. Überschreitet das Lastmoment dieses Kippmoment, so wirkt kein Moment mehr, der Läufer läuft aus und bleibt stehen.
Beim Einschalten besitzt das Statordrehfeld sofort Synchrondrehzahl, der Läufer jedoch braucht aufgrund seiner Masse Zeit zur Beschleunigung. Daher braucht ein Synchronmotor eine Anfahrhilfe (z.B.:Anlaufkäfig: Er läuft als Drehstrom-Asynchronmaschine bis zur Synchrondrehzahl an). Erreicht der Läufer annähernd Synchrondrehzahl, wird der Erregerstrom der Läuferwicklung eingeschaltet, damit der Rotor in das rotierende Statordrehfeld hineingezogen wird.
Die Motordrehrichtung ist durch das Statordrehfeld vorgegeben, für einen Richtungswechsel müssen 2 Phasen vertauscht werden.
Jeder permanenterregte Synchronmotor kann auch als Synchrongenerator arbeiten. Beispiele sind Fahrrad- und Motorrad-Lichtmaschinen. Fremderregte Synchronmaschinen werden in Kraftwerken, Stromaggregaten und als Auto-Lichtmaschine eingesetzt.
Synchronmotoren können mit Einphasen-Wechselstrom, oder mit Drehstrom (siehe hierzu Drehstrom-Synchronmaschine) betrieben werden. Seltener findet man auch zweiphasige Synchronmotoren.
Bürstenlose Gleichstrommotoren (engl. BLDC oder brushless motor) sind wie o.g. Synchronmotoren mit Permanentmagnet-Läufer aufgebaut. Sie unterscheiden sich durch die elektronische Ansteuerung der Wicklungen und den Betrieb an Gleichspannung.
Vor- und Nachteile
Ein Vorteil von Synchronmotoren gegenüber kommutierten Gleichstrommotoren ist der Wegfall des den Betriebsstrom führenden Kommutators – es muss lediglich die wesentlich geringere Erregerleistung mit Schleifringen zum Läufer übertragen werden; bei permanenterregten Motoren entfallen auch diese. Dadurch entfällt der Verschleiß der Bürsten und der Wirkungsgrad steigt.
Ein Vorteil des Synchronmotors gegenüber dem Asynchronmotor ist die starre Kopplung der Drehzahl und der Winkellage an die Betriebsfrequenz. Daher eignen sich Synchronmotoren für Stellantriebe und andere Anwendungen, bei denen eine belastungsunabhängige, stabile Drehzahl gefordert ist. Außerdem sind permanenterregte Synchronmotoren insbesondere für kleinere Maschinen kompakter und effizienter als Asynchronmaschinen. Mit einem Drehstrom-Synchronmotor ist zudem der Phasenschieberbetrieb möglich. Nachteilig ist der schwierigere Selbstanlauf am Drehstromnetz. Eine Möglichkeit, diesen Nachteil zu vermeiden, ist die zusätzliche Installation eines Kurzschlusskäfigs im Läufer, sodass der Motor als Asynchronmotor anlaufen kann.
Typisch für Synchronmotoren sind unerwünschte mechanische Drehschwingungen des Läufers, die durch ungleichmäßige Belastung oder Bestromung erregt werden können. Sie können bis zur Überschreitung des Kippmomentes führen und bewirken ein ungleichmäßiges Drehmoment. Sie werden mit Kurzschlusswindungen (Kurzschlusskäfig oder Dämpferwicklungen um die Läuferpole) vermieden. Für den Betrieb am Umrichter wird gewöhnlich die Rotorlage erfasst.
Einphasige Synchronmotoren
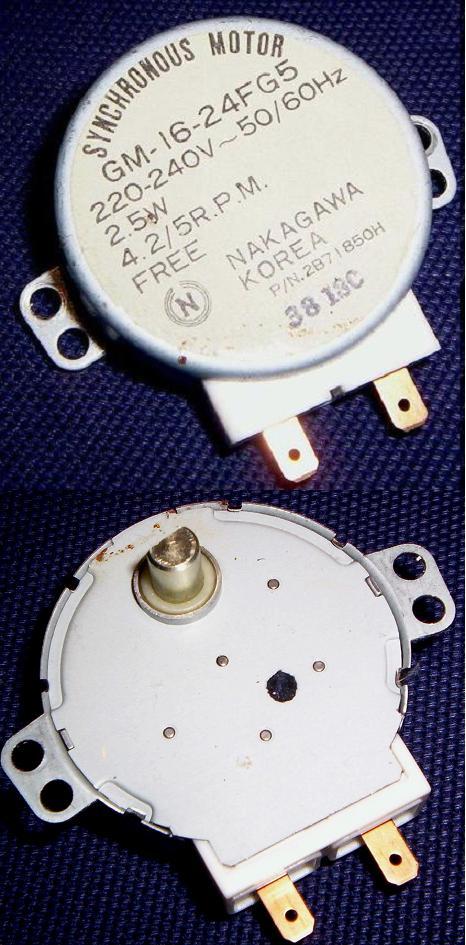
 Synchronmotor mit Getriebe (Drehteller-Antrieb einer Mikrowelle), Durchmesser 50 mm
Synchronmotor mit Getriebe (Drehteller-Antrieb einer Mikrowelle), Durchmesser 50 mmEinphasige Synchronmotoren benötigen eine Anlaufhilfe, um „Tritt zu fassen“, permanenterregte einphasige Motoren laufen jedoch oft durch Schwingbewegungen von selbst in einer undefinierten Richtung an. Beispiele hierfür sind kleine Wasserpumpen (Laugenpumpen und Aquariumpumpen) und Zitronenpressen.
Für kleine Antriebe (sog. Synchronuhren) gibt es auch Synchronmotoren, deren Läufer nicht magnetisiert sind und Zähne zur Konzentration des magnetischen Feldes des (ebenfalls gezahnten) Stators aufweisen. Diese gleichen im Prinzip den Reluktanzmotoren. Sie benötigen ebenfalls eine Starthilfe.
Einphasen-Synchronmotoren finden sich in einer Vielzahl kleiner Antriebe, wo es auf konstante Drehzahl oder einfache Bauweise ankommt:
- Synchron- und Tochteruhren (an die Netzfrequenz gekoppelte große Zeigeruhren)
- Schaltuhren, Programmschalter in Waschmaschinen und Zeitschalter
- Antriebe von Spiegelkugeln
- Aquarium- und Zimmerspringbrunnen-Wasserpumpen
- Laugenpumpen in Waschmaschinen (diese waren früher Spaltpolmotoren)
- Drehtellerantriebe in Mikrowellenherden
Einphasen-Synchronmotoren mit Hilfsphase
Zweiphasen-Synchronmotoren werden häufig als Ersatz für die weniger effizienten Kondensatormotoren verwendet. Sie haben ein besseres Anlaufverhalten und Anlaufdrehmoment als Einphasen-Synchronmotoren und gestatten eine definierte Drehrichtung und eine Drehrichtungsumkehr. Einsatzbeispiele sind:
- Pumpenantriebe
- Ventilantriebe
Dreiphasen-Synchronmotoren
Dreiphasige Synchronmotoren finden mit der Entwicklung geeigneter sensorloser leistungselektronischer Ansteuerung auch zunehmend Anwendung bei kleineren Leistungen[1], zum Beispiel als Stellantriebe. Sie besitzen hierbei den Vorteil einer definierten Läuferstellung bei hoher Dynamik, hohem Drehmoment und hoher Effizienz.
Bürstenlose Gleichstrommotoren
Kleine permanenterregte Synchronmotoren mit einer schaltenden Elektronik werden oft als bürstenlose Gleichstrommotor, englisch Brushless direct current mit der Abkürzung BLDC, bezeichnet. Die Spulenstränge des Stators werden über einen Vierquadrantensteller angesteuert. Die Elektronik zur Ansteuerung der Brücke ist ein geregelter Frequenzumrichter.
Siehe auch
Literatur
- Gerd Fehmel, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen. 12. Auflage, Vogel Buchverlag, Oldenburg und Würzburg, 2000, ISBN 3-8023-1795-5
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten, 1990, ISBN 3-8085-5002-3
- Günter Springer: Fachkunde Elektrotechnik. 18.Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9
Weblinks
 Commons: Synchronmotoren – Sammlung von Bildern, Videos und Audiodateien
Commons: Synchronmotoren – Sammlung von Bildern, Videos und AudiodateienEinzelnachweise
- ↑ http://www.user.fh-stralsund.de/~emasch/1024x768/Dokumentenframe/Versuchsanleitungen/WING_MB/EMM4_Servobremse_Mitsubishi.pdf Ausführungen zu Drehstrom-Synchronmaschinen
Wikimedia Foundation.