- Elektromotor
-
 Diverse Elektromotoren, mit 9V-Batterie als Größenvergleich
Diverse Elektromotoren, mit 9V-Batterie als Größenvergleich
Elektromotor bezeichnet einen elektromechanischen Wandler (elektrische Maschine), der elektrische Energie in mechanische Energie umwandelt. In Elektromotoren wird die Kraft, die von einem Magnetfeld auf die stromdurchflossenen Leiter einer Spule ausgeübt wird, in Bewegung umgesetzt. Damit ist der Elektromotor das Gegenstück zum Generator, der Bewegungsenergie in elektrische Energie umwandelt. Elektromotoren erzeugen meist rotierende Bewegungen, sie können aber auch translatorische Bewegungen ausführen (Linearantrieb). Elektromotoren werden zum Antrieb verschiedener Arbeitsmaschinen und Fahrzeuge (vor allem Schienenfahrzeuge) eingesetzt.
Inhaltsverzeichnis
Geschichte
1820 entdeckte der dänische Physiker und Philosoph Hans Christian Ørsted die magnetische Wirkung des elektrischen Stroms, ein grundlegendes Phänomen des Elektromagnetismus. Ein Jahr später veröffentlichte Michael Faraday seine Arbeitsergebnisse über „elektromagnetische Rotation“. Er konstruierte eine Vorrichtung, bei der ein elektrischer Leiter um einen festen Magneten rotierte und im Gegenexperiment ein beweglicher Magnet um einen festen Leiter. 1822 entwickelte Peter Barlow das nach ihm benannte Barlow-Rad. Der britische Wissenschaftler William Sturgeon erfand 1832 einen weiteren Motorvorläufer.[1] Auf dem europäischen Kontinent wirkten Ányos Jedlik (1827) und Hermann Jacobi an der Weiterentwicklung des Gleichstrom-Elektromotors. So entwickelte Jacobi bereits 1834 den ersten praxistauglichen Elektromotor in Potsdam und stattete 1838 in Sankt Petersburg ein sechs Personen fassendes Boot mit dem von ihm entwickelten 220 Watt starken Motor aus[2], was somit gleichzeitig auch die erste Anwendung eines Elektromotors in der Praxis darstellte. Auch der amerikanische Grobschmied Thomas Davenport in Vermont entwickelte einen Kommutatormotor. Auf sein Design wurde ihm am 25. Februar 1837 ein Patent erteilt.
Damit war um 1837/1838 die Grundlage für einen elektromotorischen Antrieb bekannt und auch bis zur anwendungstauglichen Arbeitsmaschine entwickelt. Werner von Siemens ließ im Jahre 1866 seine Dynamomaschine patentieren. Sie ermöglichte erstmals eine Erzeugung elektrischer Energie in größerem Umfang. Dies verhalf dem Elektromotor zum Durchbruch bei einer praxistauglichen breiten Anwendung.
-

Das „Barlow-Rad” (1822)
-

Jedlik-Motor (1827)
-

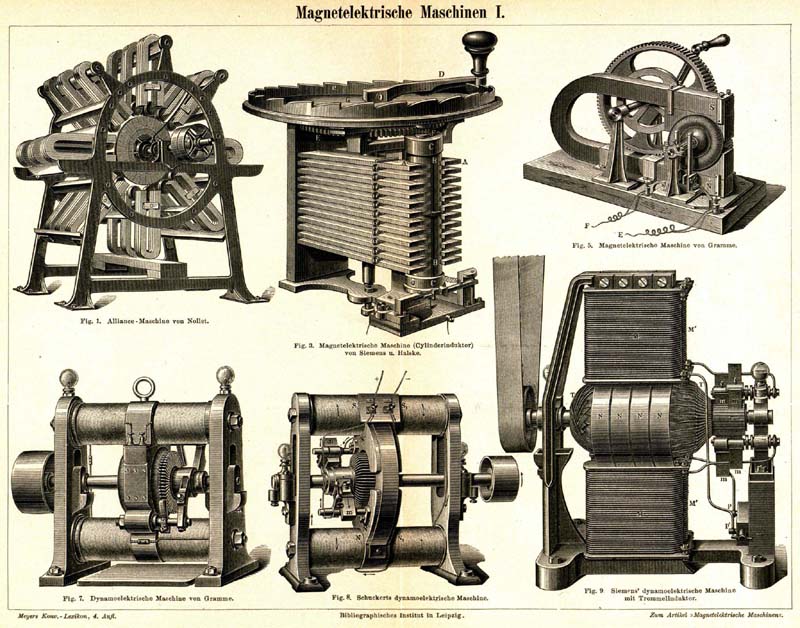
„Magnetelektrische Maschinen“ I (E-Motore) um 1890
-

„Magnetelektrische Maschinen“ II (E-Motore) um 1890
Grundprinzip/Funktionsweise
Die Drehbewegung eines Elektromotors beruht auf den Kräften, die verschiedene Magnetfelder aufeinander ausüben (Lorentzkraft).
Gleichstrommotor (Kommutatormotor)
→ Hauptartikel: Gleichstrommaschine
 Läufer eines Kommutatormotors; Kohlebürsten und Stator sind entfernt
Läufer eines Kommutatormotors; Kohlebürsten und Stator sind entferntDer (feststehende) Stator kann bei einem Gleichstrommotor ein Dauermagnet mit Polschuhen sein, jedoch ist auch eine Fremderregung über eine Erregerspule anstatt des Dauermagneten möglich. Bei einem Wechselstrom- Kommutatormotor oder auch Universalmotor befindet sich im Stator hingegen immer eine Erregerspule. Wird Strom durch diese Spule geleitet, baut sich das Erregerfeld (Magnetfeld) auf (Ørsted-Prinzip).
Im Inneren des Stators ist ein Rotor, der in den meisten Fällen aus einer Spule mit Eisenkern (dem sogenannten Anker) besteht, der drehbar im Magnetfeld zwischen den Polschuhen des Stators gelagert ist.
Die Stromzuführung für den Anker erfolgt über einen segmentierten Kommutator und Schleifkontakte (Kohlebürsten). Schickt man durch den Rotor Strom, entsteht auch hier ein Magnetfeld, das jetzt in Wechselwirkung mit dem Magnetfeld des Stators tritt. Er dreht sich somit um seine Achse und schaltet über den sich mitdrehenden Kommutator immer die passenden Wicklungen in den Stromweg und kann so elektrische Arbeit in mechanische Arbeit umwandeln.
Hätte ein solcher Motor keinen Kommutator, würde sich der Anker so weit drehen, bis das Rotormagnetfeld zum Statorfeld gleichgerichtet ist. Damit er an diesem „toten Punkt“ nicht stehen bleibt, wird der Strom in den Ankerspulen mit Hilfe des Kommutators (auch Stromwender oder Kollektor genannt) bei jedem neuen Segment umgeschaltet. Der Kommutator besteht aus Metallsegmenten, die eine durch schmale Streifen nichtleitenden Materials (Kunststoff, Luft) unterbrochene Zylinder- oder Kreisfläche bilden. An den Segmenten sind die Ankerwicklungen angeschlossen. Am Kommutator liegen, durch Federn angedrückt, meist zwei Kohlebürsten an, die den Strom zuführen. Mit jeder Drehung des Rotors wird die Stromrichtung durch die Ankerwicklungen geändert und es gelangen diejenigen Leiter in das Magnetfeld des Stators, deren Stromfluss so gerichtet ist, dass ein Drehmoment erzeugt wird.
Das Magnetfeld im Rotor steht – relativ zum Stator – fest, der Eisenkern des sich drehenden Ankers muss daher zur Vermeidung von Wirbelströmen aus einem Blechstapel bestehen.
Nach diesem Prinzip können auch Wechselstrommotoren gebaut werden, wenn das Erregerfeld mit dem Wechselstrom ebenfalls seine Polung ändert (Universalmotor). Dann muss auch der Stator aus einem Blechpaket bestehen.
Wechsel- und Drehstrommotoren
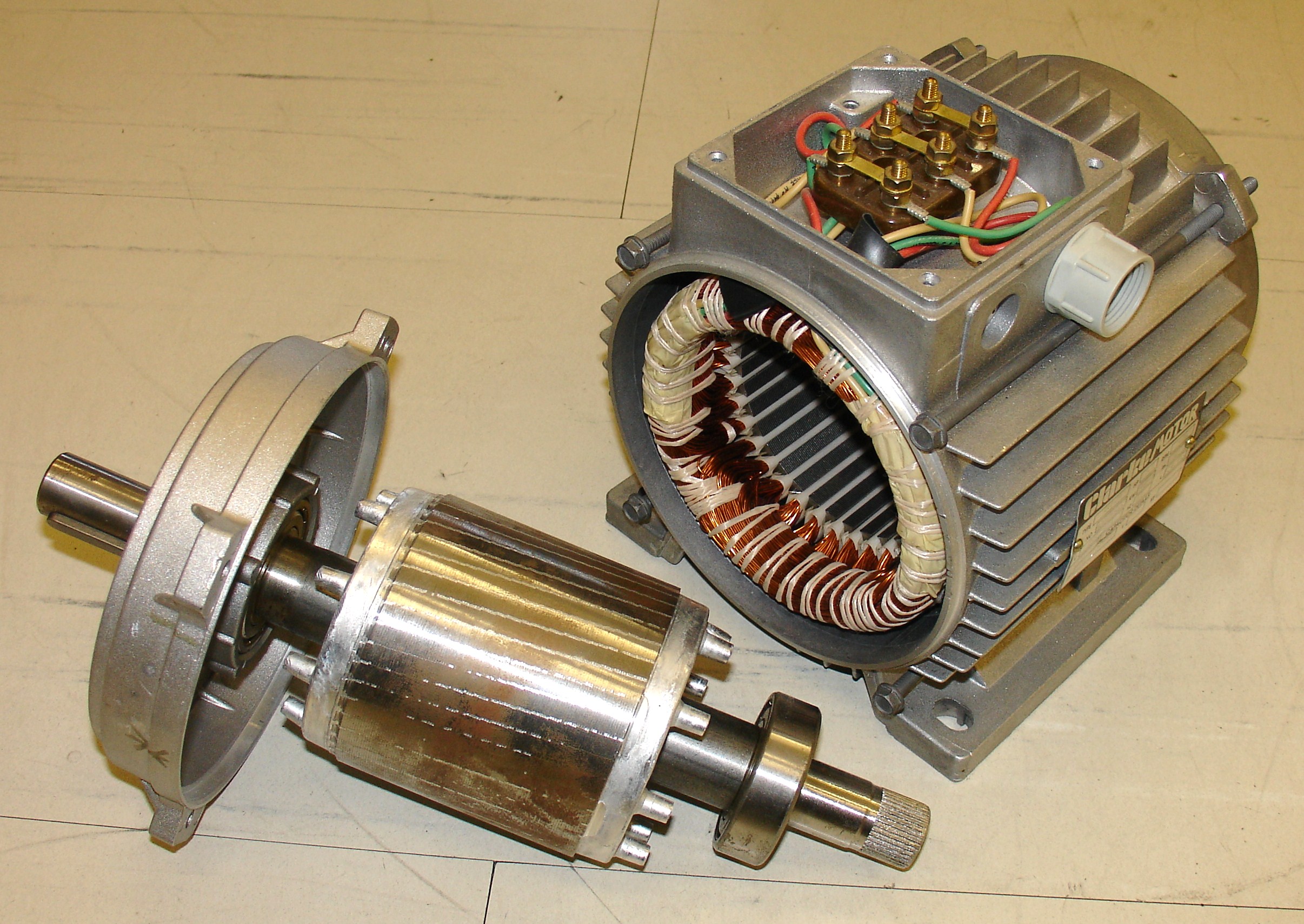
 Zerlegter Asynchron-Drehstrommotor mit Kurzschlussläufer und Leistung von 750 Watt
Zerlegter Asynchron-Drehstrommotor mit Kurzschlussläufer und Leistung von 750 WattBei Wechselstrom kann auch auf einen Kommutator verzichtet werden, wenn die Umdrehungszahl im Rhythmus des Wechselstromes erfolgt; das dann mit umlaufende Magnetfeld des Rotors wird dann erzeugt:
- durch vom Erregerfeld induzierte Ströme in einer Kurzschlusswicklung (Asynchronmotor)
- durch Magnetisierung eines Eisenkernes mit Polen (Reluktanzmotor, Schrittmotor)
- durch Dauermagnete (Schrittmotor, elektronisch kommutierter Gleichstrommotor, Synchronmotor)
- durch einen elektrisch erregten Läufer (siehe Synchronmaschine)
Solche Motoren besitzen daher kein oder ein geringes Anlaufmoment; sie benötigen eine Anlaufhilfe, können jedoch mit Wechselstrom mit mehr als nur einer Phase auch selbst starten:
- Drehstrommotoren werden mit Drehstrom betrieben, der aus drei um 120° phasenverschobenen Wechselspannungen besteht und so ein Drehfeld erzeugt
- Kondensator- und Spaltpolmotoren erzeugen sich aus einem einphasigen Wechselstrom selbst eine Hilfsphase (ein Drehfeld) zum Anlauf.
- Schritt- und Reluktanzmotoren werden mit frequenzveränderlichem Wechselstrom und/oder mit mehreren Phasen betrieben, damit sie „im Tritt“ bleiben bzw. keine Schrittverluste auftreten.
- Synchronmotoren benötigen eine Starthilfe oder schaukeln/schwingen sich von selbst „in Tritt“.
Elektromotorarten
Drehfeld- und Wanderfeld-Maschinen
Stromwender- bzw. Kommutator-Maschine
- Gleichstrommotor
- Universalmotor (für Gleich- und Wechselstrom)
- Repulsionsmotor
Praktische Anwendungen
Elektromotoren kommen sowohl ungeregelt als auch geregelt zum Einsatz. In einfachen Fällen kommen ungeregelte Drehstrommotoren mit Stern-Dreieck-Umschaltungen zur Anwendung. Diese sind jedoch nur zur Lösung primitiver Antriebsaufgaben geeignet. In den meisten Fällen in der heutigen Praxis liegen anspruchsvollere Antriebsprobleme vor, sodass die Elektromotoren durch eine Regelung geregelt werden müssen. Handelt es sich dabei um größere Leistungen, die erforderlich sind, so müssen noch leistungselektronische Stellglieder zwischen Regelung und Elektromotor dazwischengeschaltet werden. Kommen Regelung und Elektromotor zusammen und bilden sie gemeinsam eine funktionelle Einheit, so spricht man vom „Elektroantrieb“. Per se ist also ein Elektromotor nicht an eine Regelung gebunden; in vielen praktischen Fällen hat sich jedoch gerade deren Zusammenwirken als zweckmäßig erwiesen.
In der Vergangenheit fanden Elektromotoren zunächst praktische Verwendung als Universalantrieb zur Ersetzung von Dampfmaschinen in Fabriken und wurden zu diesem Zweck über Riementriebe zum Antreiben mechanischer Webstühle und dergleichen eingesetzt (spätes 19. Jahrhundert). Mit der Einführung von Fließbändern in der Industrie wurden Elektromotoren dann zum Antriebsmittel ganzer Industriezweige schlechthin.
Im Bereich Verkehr und Mobilität kamen Elektromotoren erstmals bei Elektrolokomotiven und Elektrischen Bahnen zum Tragen, später in Elektrokarren und in Gabelstaplern. Mit der Weiterentwicklung von Akkus werden heute Elektroautos mit immer größerer Reichweite gebaut und gelten wegen der hohen Effizienz des Elektroantriebs als Alternative zum Verbrennungsmotor in der Zukunft. Entwicklungen in der Leistungselektronik brachten einen weiteren Anwendungsschub – von da ab konnten die wartungsfreien, preiswerten Asynchronmotoren auch für drehzahlvariable Antriebe eingesetzt werden.
Heute werden Elektromotoren in großer Zahl in Maschinen, Automaten, Robotern, Spielzeug, Haushaltsgeräten, Elektronikgeräten (zum Beispiel Videorecorder, Festplatten, CD-Spieler), in Ventilatoren, Rasenmähern, Kränen usw. eingesetzt. Die große Bedeutung des Elektromotors für die heutige moderne Industriegesellschaft spiegelt sich auch im Energieverbrauch wider: Elektromotoren haben einen Anteil von über 50 Prozent am Stromverbrauch in Deutschland.[3]
Energieeinsparung
Technologisch veraltete Elektromotoren führen zu einem erhöhtem Energieverbrauch. 1998 wurde eine freiwillige Vereinbarung zwischen dem europäischen Sektorkomitee für elektrische Antriebe CEMEP und der Europäischen Kommission getroffen. Hierbei wurden drei Wirkungsgradklassen definiert:
- EFF3 = Motoren mit niedrigem Wirkungsgrad
- EFF2 = Motoren mit verbessertem Wirkungsgrad
- EFF1 = Motoren mit erhöhtem Wirkungsgrad
In Jahr 2009 wurde eine neue weltweit geltende Normierung für die Effizienzklassen (EN 60034-30:2009) eingeführt. Die folgenden Wirkungsgradklassen für Niederspannungs - Drehstrom - Asynchronmotoren im Leistungsbereich von 0,75 kW bis 375 kW sind heute geltend:
- IE1 = Standard Wirkungsgrad (vergleichbar EFF2)
- IE2 = Hoher Wirkungsgrad (vergleichbar EFF1)
- IE3 = Premium Wirkungsgrad
Elektromotoren in mobilen Anwendungen
Elektromotoren werden in Kraftfahrzeugen und Bahnen seit langem angewendet. Gründe hierfür sind:
- hoher Wirkungsgrad (insbesondere auch bei Teillastbetrieb, wichtig bei Batteriebetrieb),
- Unterbrechungsfreie Drehmomentabgabe über den vollen Geschwindigkeitsbereich, keine Anfahrsynchronisation oder schaltbare Übersetzung notwendig. Dadurch hoher Fahrkomfort (zum Beispiel auch wichtig bei Versehrtenfahrzeugen).
- Geringere Abmessung und geringere Masse als vergleichbarer Verbrennungsmotor; dadurch platzsparender Einbau direkt in der Nähe der Räder möglich.
- Keine Emissionen; daher Einsatz in abgassensiblen Bereichen möglich (Werkhallen, Tunnelgebiete und Wohngebiete etwa)
- Geringere Betriebskosten (sehr lange Motor-Lebensdauer, geringere Wartung).
- Einfacher Aufbau einschließlich einfacherem Kühlsystem.
- Einrichtung einer elektromotorischen Bremse die eine Nutzbremsung mit Energierückgewinnung ermöglicht und keine Wartungsarbeiten wegen Verschleiß benötigt, wie es bei herkömmlichen Bremssystemen der Fall ist.
Trotz dieser Vorteile wird der Elektromotor bisher wenig in PKW und LKW eingesetzt. Grund ist insbesondere die begrenzte maximale Reichweite bzw. die hohe Masse der Energiespeicher (Akkumulatoren).
Mit einem Elektromotor und einem Akkumulator werden auch manche Modellflugzeuge (Elektroflug), kleine Schiffe, Torpedos und U-Boote angetrieben. Die Elektromotoren anderer U-Boote werden aus Brennstoffzellen oder aus einem mitgeführten kleinen Kernkraftwerk gespeist.
Fahrzeugantriebs-Konzepte mit Elektromotoren, jedoch ohne oder nur teilweiser Energiespeicherung in einem Akkumulator, sind:
- Brennstoffzellen-Antrieb: Ein Projekt ist zum Beispiel HyFLEET:CUTE, die Weiterführung des Projektes CUTE. Probleme bestehen in der Lebensdauer und den Kosten der Brennstoffzellen.
- Hybridantrieb (zum Beispiel Toyota Prius): Ein Ottomotor wird mit einem Elektromotor/Generator kombiniert und mit Akkumulatoren gepuffert (Vorteile im Teillastbereich/Stadtbetrieb, hoher Fahrkomfort, Nutzbremsung, Pufferung auch mit Doppelschichtkondensatoren).
- Gyroantrieb: Als Energiespeicher dient ein Schwungrad mit einem Generator, der die Fahrmotoren antreibt (wird unter anderem bei Gyrobussen angewendet, geringe Reichweite, Nutzbremsung möglich).
Bei elektrischen Bahnen und Oberleitungsbussen wird die Elektroenergie mit Oberleitungen oder Stromschienen zugeführt. Auch hier kann Nutzbremsung stattfinden, wenn das speisende Netz dafür ausgelegt ist oder Akkumulatoren installiert werden. Auch Doppelschichtkondensatoren werden hierbei angewendet.
Eine weitere mobile Anwendung ist der dieselelektrische Antrieb; hier erzeugt ein Dieselaggregat elektrischen Strom, der die Fahrmotoren antreibt. Nutzbremsung ist nicht möglich, wenn nicht zusätzlich Akkumulatoren mitgeführt werden. Dieselelektrische Antriebe finden sich in Schiffen, Lokomotiven und U-Booten (hier ergänzt durch einen Akkumulator).
Literatur
- Herbert Rentzsch: Elektromotoren. 4. überarb. Aufl., ABB Drives AG, Turgi/Schweiz 1992, ISBN 3-590-80853-5
- Peter Bastian, Günter Springer: Fachkunde Elektrotechnik. 21. überarb. und erw. Aufl., Verlag Europa-Lehrmittel, Haan-Gruiten, 1996, ISBN 3-8085-3431-1
- Gregor D. Häberle, Heinz O. Häberle: Elektrische Maschinen in Anlagen der Energietechnik. 3. überarb. und erw. Aufl., Verlag Europa-Lehrmittel, Haan-Gruiten, 1994, ISBN 3-8085-5003-1
- Konrad Rüffer: Schalten von Elektromotoren. Verlag Technik, Berlin 1990, ISBN 3-341-00827-6
Einzelnachweise
- ↑ Deutsche Gesellschaft für Post- und Telekommunikationsgeschichte e. V. – William Sturgeon
- ↑ Geschichte Elektromotor
- ↑ VDE-Studie Effizienz- und Einsparpotentiale elektrischer Energie
Siehe auch
- Ankerkurzschlussbremsung
- Einschaltdauer
- Nennbetriebsart
- Neodym-Eisen-Bor (Werkstoff der stärksten Dauermagneten)
- Phonisches Rad
- Schleifringläufermotor
- Stromverdrängungsläufer
- Elektrischer Generator
Weblinks
 Commons: Elektromotor – Sammlung von Bildern, Videos und Audiodateien
Commons: Elektromotor – Sammlung von Bildern, Videos und Audiodateien Wiktionary: Elektromotor – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Elektromotor – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen -



Wikimedia Foundation.