- Verdränger und Gleiter
-
 Gleiter
Gleiter
 Halbgleiter
Halbgleiter Verdränger
VerdrängerUnter einem Verdränger versteht man im Schiffbau ein Boot, das sich zu jeder Zeit mit dem kompletten Unterwasserschiff im Wasser befindet und dieses verdrängt. Das Gegenteil von Verdrängern sind Gleiter, die sich mit zunehmender Geschwindigkeit aus dem Wasser heben und anfangen, darauf zu gleiten. Das ist allerdings nur bei einer bestimmten Rumpfform möglich und erfordert eine der Bootsgröße und vor allem dem Bootsgewicht angemessen starke Antriebsleistung. Zudem gibt es noch Halbgleiter, die sich in Konstruktion und Betrieb zwischen den Verdrängern und (Voll-)Gleitern befinden.
Ein Fahrzeug, das als Verdränger konstruiert und gebaut wurde, kann auch durch eine beliebige Erhöhung der Antriebsleistung nicht zum (Voll-) Gleiter werden.
Inhaltsverzeichnis
Grundlagen
Jedes Wasserfahrzeug, gleich ob Floß, Flugboot, Wasserflugzeug, Flugzeug mit Stützschwimmern, Amphibienfahrzeug, Boot oder auch Schiff, ist im Ruhezustand ein Verdränger, da jeder auf dem Wasser schwimmende Körper Wasser gleichen Gewichts verdrängt. Dies ist Inhalt des Archimedisches Prinzips. Die Unterschiede zwischen Verdränger, Halbgleiter und Vollgleiter treten erst zu Tage, wenn sich ein Wasserfahrzeug in Bewegung setzt.
Verdränger
Ein langsames Wasserfahrzeug fährt in der Regel in Verdrängerfahrt. Dabei wird durch den Rumpf genauso viel Wasser verdrängt, wie es seiner Masse entspricht. Bei steigender Geschwindigkeit steigt der Widerstand durch die eigene Heckwelle. Dadurch ist diese Art der Fortbewegung nur bis zur sogenannten Rumpfgeschwindigkeit möglich.
Rumpfgeschwindigkeit
Kein Verdränger kann mit dem Heck die Welle überholen, die durch den Bug desselben Verdrängers während der Fahrt gebildet wird. In der Praxis macht sich das Problem bereits bemerkbar, wenn die dem Heck ein Stück vorauseilende Heckwellenvorderseite die dem Bug nacheilende Bugwellenrückseite erreicht, also die Bug- und die Heckwellensysteme miteinander zu interagieren beginnen. Durch extrem schlanke Bauweisen (siehe auch den Artikel Katamaran) ab einem Längen-/Breitenverhältnis von etwa 8:1 interagieren die Wellensysteme von Bug und Heck zwar nicht mehr miteinander, aber das Heck kann dennoch die Bugwelle nicht überholen. In der Praxis bedeutet das, dass man bei kurzen breiten Rümpfen nur mit einem Mehr an Antriebsleistung dieselben Geschwindigkeiten erreichen kann wie mit weniger Antriebsleistung in einem gleich langen, schmalen Rumpf.
Dennoch ist die tatsächlich von einem Verdränger zu erreichende Endgeschwindigkeit ausschließlich von der Länge des Schiffsrumpfes in der Wasserlinie abhängig, nicht jedoch von seiner Form oder Breite. Diese spezifisch für jeden Rumpf existierende, maximale Endgeschwindigkeit nennt man Rumpfgeschwindigkeit.
Die Rumpfgeschwindigkeit eines jeden Verdrängers ist exakt errechenbar und lässt sich auch mit dem stärksten Antrieb nicht überschreiten. Wird die Rumpfgeschwindigkeit durch widrige Umstände dennoch überschritten (z. B. in einem Sturm auf dem Weg von einem Wellenkamm in ein Wellental), so kommt es zum gefährlichen Surfen.
Das gilt auch für Verdrängerrümpfe, die als Wellenbinder (siehe unten) konstruiert sind, auch wenn deren Rumpfgeschwindigkeiten von den klassischen abweichen, da sie sich nicht über die Rumpflänge und Wassertiefe, sondern über die Energie der Wasserteilchen berechnen lassen müssen und immer asymptotisch bei etwa 50 Knoten enden. Ein Beispiel für ein Boot ist die deutsche Schnellbootreihe 140/141 Jaguar-Klasse und eines für Schiffe ist die französische Baureihe der Zerstörer der Le-Terrible-Klasse.
Kavitation
Allgemeines
→ Hauptartikel: Kavitation
Ein zweites Phänomen, das die Höchstgeschwindigkeit eines klassischen Verdrängers begrenzt, ist die Kavitation. Schiffspropeller erzeugen auf der Blattvorderseite einen Unterdruck, der bei höheren Drehgeschwindigkeiten den Wasserdruck an der Unterdruckseite des Propellers soweit absinken lässt, dass er unter den Dampfdruck des Wassers sinkt. Dann entstehen Dampf- oder Gasblasen am Propeller, die sehr schnell wieder kollabieren und dadurch mechanische Schäden verursachen können. Außerdem sinkt der Vortrieb des Propellers durch das Auftauchen der Dampf- und Gasblasen stark. Kavitation kann durch Herabsetzen der Propellerdrehzahl und durch entsprechend geformte kavitationsarme Propeller gemindert werden. U-Boote können diesem Problem außerdem durch Erhöhung der Tauchtiefe begegnen, da mit Zunahme der Tiefe der Wasserdruck ansteigt.
Ein mit Kavitation gefahrener Impeller oder auch ein im Kavitationsbereich gefahrener Propeller sieht angenagt aus oder als habe das Boot oder Schiff gar eine Grundberührung gehabt. Dies nennt man Kavitationsfraß.
Kavitation verursacht überdies Vibrationen, die den Antrieb eines Bootes oder Schiffes beschädigen, ja sogar zerstören können.
Der Moment, ab dem bei einem Verdränger Kavitation auftritt, lässt sich relativ gut berechnen. Man weiß heute, dass allen Überwasserschiffen, gleich wie groß sie motorisiert sind oder wie unendlich lang und schlank sie sein mögen, in Verdrängungsfahrt bei etwa 50 Knoten eine asymptotische Geschwindigkeitsgrenze gesetzt ist. Der Geschwindigkeitsrekord für ein als Verdränger konstruiertes und im Einsatz betriebenes, nicht in Tauchfahrt befindliches Wasserfahrzeug steht seit etwa 1940 bei exakt 45,6 Knoten und wurde vom französischen Zerstörer Le Terrible aufgestellt. In Werfterprobungsfahrten wurden allerdings sowohl von den dann noch nicht voll bemannten Schiffen der Le-Terrible-Klasse, als auch von den dann noch nicht einsatzklar ausgerüsteten deutschen Schnellbooten der Jaguar-Klasse knapp 48 Knoten erreicht.
Bei Unterwasserfahrzeugen tritt der Kavitationseffekt später ein, da mit jedem Meter zunehmender Wassertiefe der Wasserdruck um 99 bis 107 hPa steigt, also mit zunehmender Tiefe der durch die Geschwindigkeit verursachte Widerstand des Wassers auf den Verdränger größer werden darf, bevor es auf der Unterdruckseite der Antriebsschaufeln zur Kavitation kommt. Man kann errechnen, dass große, moderne und nuklear angetriebene Unterseeboote in der Lage sind, in etwa 500 Metern Wassertiefe etwa 65 Knoten zu fahren. Dabei machen sie dann aber so einen Lärm (Kavitation ist laut), dass davon auszugehen ist, dass die Reisegeschwindigkeiten solcher Fahrzeuge aus taktischen Gründen auch in Zukunft 40 Knoten nicht übersteigen werden, es sei denn, die Reisetiefe sinkt noch weiter ab.
Superkavitation
→ Hauptartikel: Superkavitation
Es gibt inzwischen zahlreiche Bemühungen, die Kavitation bereits am Bug eines Unterwasserfahrzeuges entstehen zu lassen und so die Komponente Wasserwiderstand aus der Gleichung zu entfernen; immerhin ist der Widerstand des Wassers etwa 800 mal so hoch wie der des Wasserdampfes. Dieses Phänomen der beabsichtigt herbeigeführten und dann in einen Vorteil verwandelten Kavitation nennt man Superkavitation. Experimentaltorpedos haben auf diese Art bereits über 400 Knoten (knapp 800 km/h) erreicht. Die russischen Schkwal-Torpedos erreichen Geschwindigkeiten von 350 km/h und schneller. Sie werden seit 1977 gefertigt.
In der Theorie sind Verdrängern, die per Superkavitation unterwegs sind, dieselben physikalischen Grenzen gesetzt, wie sie auch beim Betrieb von Luftfahrzeugen (Flugzeugen) auftreten.
Bei Oberflächenfahrzeugen, also nicht vollständig untergetauchten Wasserfahrzeugen, funktioniert Superkavitation nicht, da sie den Auftrieb aufhebt. Außerdem kann man errechnen, dass die Kräfte, die kurz vor dem Eintreten der Superkavitation auftreten, ein Oberflächenfahrzeug ins Gleiten bringen würden. Billiger und einfacher ist es, will man an/auf der Wasseroberfläche schneller als die oben angegebenen 50 Knoten unterwegs sein, gleich einen Gleiter zu bauen und zu betreiben.
Klassische Verdränger finden sich in der gesamten Spanne vom Einbaum über Kolumbus' Santa Maria bis hin zur Queen Mary 2.
Gleiter
 Musto Skiff in Gleitfahrt
Musto Skiff in GleitfahrtGleiter sind durch ihre Rumpfkonstruktion dazu geeignet, sich mittels eines starken Antriebes gegen den Wasserwiderstand aus dem Wasser zu erheben und auf dem Wasser zu gleiten. Es befindet sich also der überwiegende Teil der Fahrzeugmasse oberhalb der Wasserlinie. Da sich der Rumpf aus dem Wasser hebt, reduziert sich der Widerstand durch die Bugwelle. Schließlich beginnt bei weiterer Erhöhung der Geschwindigkeit auch das Heck auf der Welle zu gleiten. Durch den dabei viel geringeren Wasserwiderstand werden im Vergleich zur Verdrängerfahrt deutlich höhere Geschwindigkeiten erreicht. Der Übergang von der Verdrängerfahrt zur Gleitfahrt ist das Äquivalent auf dem Wasser zum Durchbrechen der Schallmauer in der Luft, bei dem ein Flugzeug seine eigene Schallwelle überholt.
Der Moment, in dem die Gleitfahrt einsetzt nennt man Angleiten. Könnte man den Luftwiderstand außer Acht lassen, so gäbe es keine Endgeschwindigkeit. In der Praxis wird jeder Gleiter allerdings bei zu hoher Geschwindigkeit vom Luftdruck angehoben und hebt vom Wasser ab.
Ob und wann ein Wasserfahrzeug ins Gleiten gerät, ist abhängig von der Rumpfform, der Gewichtsverteilung, der Geschwindigkeit und dem Seegang. Surfbretter, Jollen, flache Motorboote und Gleitflügelboote (Tragflügelboot) kommen relativ leicht ins Gleiten (außer bei viel Seegang), Yachten nur unter besonderen Umständen mit Wind und Wellen von achtern. Vorteilhaft für die Gleitfahrt ist ein langer, flacher Rumpf mit breitem Heck.
Typische Vertreter für Gleiter sind Surfbretter, Rennboote, Schlauchboote und Tragflächenboote sowie die Rümpfe von Flugbooten und die Schwimmer von Wasserflugzeugen.
Gleitertypen
War die Gleitfahrt früher nur auf kleine, leichte Boote beschränkt, gibt es inzwischen sogar große 30-Meter-Yachten, die als Gleiter gebaut und betrieben werden. Wird allerdings in so eine Yacht im nachhinein z. B. ein schweres Marmorbad eingebaut, kann es passieren, dass diese Yacht sich nicht mehr in die Gleitfahrt bringen lässt, da nicht nur Gewicht und Antriebsleistung, sondern auch Gewicht und Rumpfform eines jeden Gleiters in Relation zueinander stehen müssen.
Auch militärische Anwendungen von Gleitern haben inzwischen erstaunliche Größen erreicht. Inzwischen gibt es sogar ein US-amerikanisches Ein-Mann-U-Boot, das aufgetaucht in Gleitfahrt übergehen kann.
Konstruktionsaspekte
Der konstruktive und betriebstechnische Haken ist bei jedem Gleiter die Fähigkeit, überhaupt erst einmal in das Gleiten zu kommen. Diese Fähigkeit ist nicht nur von der Rumpfform, sondern vor allem vom Leistungsgewicht des Schiffes abhängig. Wenn der Gleiter jedoch erst einmal gleitet, dann könnte man theoretisch sein Gewicht, zum Beispiel durch Zuladung per Hubschrauber, auch über das Maximum des Gewichtes erhöhen, mit dem die Gleitfahrt noch erreicht werden konnte.
Ein Problem ist, dass, sehr vereinfacht dargestellt, die Geschwindigkeit, ab der ein Schiffsrumpf auf seiner Fahrt durch das Wasser in das Gleiten übergeht, mit zunehmendem Gewicht steigt. Um diese Mindestgleitgeschwindigkeit zu erreichen, ist mit zunehmendem Gewicht daher auch eine zunehmende Antriebsleistung nötig.
Da jeder Gleiter bis zu dem Moment des Gleitens hydrodynamisch ein Verdränger ist und es das Phänomen der Kavitation gibt, ist der Konstruktion des Gleiters nach oben hin eine Gewichtsgrenze gesetzt, die nur mit den hydrodynamischen Kniffen, wie sie bei einem Tragflügelboot angewandt werden, oder durch den aerodynamischen Effekt bei einem Flugboot nach oben hin verschoben werden kann. Daher gibt es jedoch keine wirklich großen Wasserfahrzeuge (Schiffe), die konstruktiv als Gleiter unterwegs sind.
Das Phänomen des Klebens
Wenn es einem Gleiter gelingt, anzugleiten, also seine Bugwelle einzuholen (indem die Vorderseite des Heckwellensystems die Rückseite des Bugwellensystems erreicht), aber nicht, mit der Abrisskante am Heck die Bugwelle zu überholen, dann nennt man das Kleben. Beim Kleben gilt, wenn auch aus einem etwas anderen Grund, dieselbe Geschwindigkeitsgrenze wie bei einem Verdränger in Verdrängungsfahrt. Asymptotisch angenähert liegt die Grenze bei 50 Knoten. Auf See kann man „Kleben“, d. h. dass ein Boot auf seiner eigenen Bugwelle über das Wasser rast, vor allem bei kleineren Booten beobachten. Grund für das Kleben eines Gleiterrumpfs ist immer eine falsche Rumpfform, also ein Konstruktionsfehler. Für kleine Boote (die als Verdränger deutlich niedrigere Rumpfgeschwindigkeiten hätten) bedeutet das Kleben aber immer noch eine schnelle Gleitfahrt, die allerdings wesentlich ruppiger ausfällt als eine echte Gleitfahrt, bei der die Bugwelle nicht nur eingeholt, sondern auch überholt wird.
Bei Flugbooten und vom Wasser aus startenden Bodeneffektfahrzeugen kann bei falscher Rumpfkonstruktion das Kleben ebenfalls auftreten, benennt aber nicht den Umstand, im Angleiten stecken zu bleiben, sondern aus dem Gleiten heraus auch bei höchsten Geschwindigkeiten nicht vom Wasser abheben zu können. Oft beobachtet und dokumentiert ist das Kleben in der Fliegerei allerdings vor allem bei besonders großen Flugbooten und Bodeneffektfahrzeugen, wenn diese von spiegelglatten Wasseroberflächen aus zu starten versuchen. Bei einem Startversuch auf einer durch Wind und Wellen angerauten Wasseroberfläche tritt das Kleben bei großen Flugbooten und Bodeneffektfahrzeugen praktisch nicht auf.
Bei rauer See ist es auch Booten, die als Gleiter zum Kleben neigen, möglich, das Kleben zu überwinden und in die echte Gleitfahrt zu gelangen, sofern aufgrund der Gegebenheiten kleinen Booten überhaupt noch eine Fahrt durch das Wasser möglich ist.
Ein beliebter Trick, mit einem klebenden Gleiterrumpf das Kleben zu überwinden, ist, die Hecksee eines anderen Bootes oder Schiffes zu schneiden, da hierdurch der Abriss der Bugwelle vom Heck vollzogen werden kann. Ein Flugboot oder Bodeneffektfahrzeug kann analog hierzu aus dem Gleiten heraus in den Flug gelangen. So gelang z. B. dem Flugboot Dornier Do X auf seinem Weltumflug nach 27 vergeblichen Versuchen im Juni 1931 nur dadurch doch noch in Rio de Janeiro der Start, dass die Hecksee eines Frachters geschnitten wurde.
Wird bereits bei einem Prototypen eines Bootes/Flugbootes/Bodeneffektfahrzeuges der Effekt des Klebens bemerkt, genügt es oft, in der Serienfertigung den Rumpf mit einer weiteren Abrisskante zu modifizieren. Bei kleinen Booten gibt es dazu jedoch oft keinen Platz, da zusätzliche Abrisskanten im Verhältnis zur Rumpfbreite auch gewisse Mindestrumpflängen verlangen. Andere Lösungen, die Grenzschicht (die für den Effekt des Klebens verantwortlich ist) positiv im Sinne des Gleitens zu beeinflussen, sind bei kleinen Booten meist unwirtschaftlich. Dadurch kommt es dazu, dass trotz des Wissens um die hydrodynamischen Vorgänge Boote produziert und vertrieben werden, die als Gleiter zum Kleben neigen.
Luftkissenfahrzeuge
Luftkissenfahrzeuge sind keine Gleiter, da sie während der Fahrt den autoerzeugten aerodynamischen Bodeneffekt nutzen, nicht aber in Berührung mit der Wasseroberfläche stehen.
Halbgleiter
Da ein Gleiter in Gleitfahrt bei gleicher Geschwindigkeit wesentlich weniger Energie benötigt, um seine Geschwindigkeit zu halten, als ein gleich großer Verdränger, steckt hinter der Halbgleiterkonstruktion die Idee, Energie zu sparen, also mit einer Yacht weniger Kraftstoff zu verbrauchen oder mit einem Segelboot schon bei weniger Wind schneller unterwegs zu sein.
Die Halbgleiter können in mehrere Untergruppierungen aufgeteilt werden:
Klassische Halbgleiter
Als klassische Halbgleiter werden folgende zwei Untergruppen bezeichnet:
Verdrängertyp
Ein Verdränger, den man per Konstruktion dazu gebracht hat, mit einem Teil des Rumpfes in Gleitfahrt zu gehen, während der Großteil desselben Rumpfes weiterhin als Verdränger unterwegs ist. Große Trawleryachten sind so unterwegs. In den 70ern sind viele Hersteller von kleinen Verdrängerbooten (etwa bis 9 m) dazu übergegangen, den Heckbereich der Boote zu verbreitern und abzuflachen, sodass man mit diesem Teil des Rumpfes in die Gleitphase gehen kann. Dies wird zusätzlich dadurch erreicht, dass der Bug so geformt ist, dass er bei schneller Fahrt das Wasser zur Seite wirft, damit der unter der Wasseroberfläche liegende Gleitbereich des Rumpfes überhaupt gleiten kann.
Gleitertyp
Ein Gleiter mit Kiel, welcher das Wasser verdrängt, also nicht vollständig aus ihm hervorsteigt. Große, seegehende Rennsegelboote sind so unterwegs. Theoretisch gehören auch Tragflügelboote in diese Gruppe. Bei großen Tragflügelbooten funktioniert der „Flug“ durch/über das Wasser im übrigen nur wegen des Effekts der Superkavitation an den im/unter Wasser befindlichen Tragflächenelementen.
Moderne Halbgleiter
Moderne Halbgleiter können ebenfalls in zwei Untergruppen eingeteilt werden und gehört in das Kapitel „Halbgleiter“, obwohl die modernen Halbgleiter gerade als Verdränger funktionieren, da in beiden Fällen ein Gleiterrumpf mit einem ausgeprägten Verdrängerunterwasserschiff kombiniert wurde.
Der Edersche DG-Hull
Der österreichische Physiker Theodor Eder wurde Ende der 1990er vom Bürgermeister von Venedig gebeten, einen Schiffsrumpf zu entwickeln, welcher keine Welle wirft. Seine Konstruktion wurde DG-Hull genannt (engl. displacement glider „Verdrängergleiter“).
Physikalisch betrachtet „löscht“ bei diesem Boot die Welle, die während der Fahrt vom Unterwasserschiff erzeugt wird, die Wellen aus, die von Bug und Heck erzeugt werden, indem das Wellental der einen Welle mit dem Wellenbergen der anderen beiden Wellen zusammenfällt. Das Boot funktioniert hervorragend und ist seit 2003 auf dem Wasser unterwegs.
Betrachtet man es genau, ist es ein Gleiter mit einem deutlich ausgeprägten Verdrängerkiel, was die Konstruktion zu einem Verdränger ohne die verdrängertypische Rumpfgeschwindigkeit macht: Denn wo keine Welle entsteht, muss auch keine überholt werden, was das Edersche Boot bei deutlich weniger Energiebedarf weitaus schneller fahren lässt, als es die Rumpfgeschwindigkeit eines gleich großen klassischen Verdrängers auch bei beliebig großer Motorisierung zuließe. Das Edersche Konzept des DG-Hull verbindet die Vorteile des Gleiters mit den Vorteilen des Verdrängers. In der Theorie ist dieses Konzept auf jede Boots- und Schiffsgröße und auf jede Verwendung anwendbar und scheint am besten zu funktionieren, wenn der Boots-/Schiffsrumpf in der Konstruktionswasserlinie (KWL) ein Längen-/Breitenverhältnis von 3:1 bis 4:1 aufweist.
Die Firma Alsphere, Inhaber aller Rechte am (Knickspant-) Rumpf der keine Wellen wirft, besitzt weltweit alle Rechte an diesem DG-Konzept und vergibt Lizenzen. Das Patent läuft 2023 aus.
Der Wellenbinder
Der Wellenbinder wurde 1910 durch den Bootsbauer und Ingenieur Claus Engelbrecht erfunden und dann in den ersten Jahrzehnten des zwanzigsten Jahrhunderts vom bei Engelbrecht angestellten deutschen Schiffbauingenieur Arthur Tiller verbessert. Er hat das gleiche Funktionsprinzip wie der Edersche DG-Hull. Es gibt jedoch zwei wesentliche Unterschiede zwischen DG-Hull und Wellenbinder:
- Der Edersche DG-Hull ist ein noch mindestens bis 2023 patentrechtlich geschützter Knickspanter, der in der Konstruktionswasserlinie in einem völlige-Länge-/Breitenverhältnis von 3:1 bis 4:1 daherkommt und als echter Halbgleiter gilt.
- Der Tillersche Wellenbinder ist ein Rundspanter, dessen Patentrechte im Verlaufe des Zweiten Weltkrieges abgelaufen sind, der aber etwas komplizierter zu berechnen und teurer zu fertigen ist als der DG-Hull, und der in der KWL in den schlanken bis sehr schlanken Längen-/Breitenverhältnissen von 5:1 bis 10:1 gebaut wurde. Außerdem ist der Tillersche Wellenbinder per Konstruktion und Rumpfform eher ein echter Verdränger als ein Halbgleiter.
Zu Lebzeiten von Arthur Tiller wurde der Rumpf noch nicht berechnet – dazu war man auch gar nicht in der Lage, sondern durch empirisches Vorgehen, also den Bau von Wasserfahrzeugen als Modell und in Echtgröße, entwickelt.
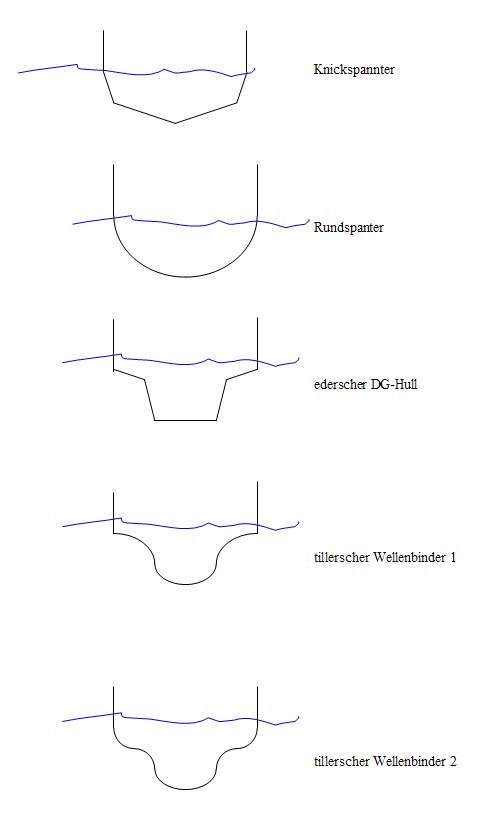
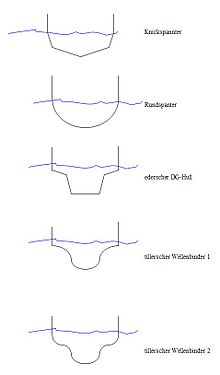 diverse Hauptspantenunterschiede in überzeichneter Darstellung
diverse Hauptspantenunterschiede in überzeichneter DarstellungAußerdem hatten Engelbrecht, Tiller und weitere ihrer zeitgenössischen europäischen und US-amerikanischen Bootsbauer und Ingenieure einen anderen Ansatz als Theodor Eder. Sie hatten nicht als Physiker Küstenanlagen vor dem Wellenschlag fahrender Boote zu schützen, sondern wollten mit den am Anfang des zwanzigsten Jahrhunderts nur schwach motorisierten Lustbooten zur Begeisterung der Besitzer und Benutzer möglichst hohe Geschwindigkeiten erzielen.
So fuhren die echten Wellenbinderkonstruktionen von damals bei rund 10 Meter Länge und gut 20 PS Antrieb knapp 10 Knoten (18 km/h) schnell, obwohl mit den Methoden der damaligen Hydrodynamik nur etwa knapp 8 Knoten (15 km/h) möglich gewesen wären, unabhängig von der Motorisierung dieser Boote.
Ein von Arthur Tiller gebautes Boot soll als Wellenbinder bei 18 Meter Länge mit 520 PS knapp 26 Knoten (48 km/h) erreicht haben, obwohl – wie heute bekannt ist – die Rumpfgeschwindigkeit der Konstruktion auch bei stärkster Motorisierung nur gute 10 Knoten (knapp 18 km/h) Fahrt durchs Wasser erlaubt.[1]
Die Unterscheidung zwischen „echten“ und „falschen“ Wellenbindern wurde um 1934 von Arthur Tiller getroffen, um diejenigen Boote, deren Unterwasserschiffe nur so aussahen wie das Unterwasserschiff eines Wellenbinders, aber lediglich als echter Verdränger oder (bei ausreichender Motorisierung) als echter Gleiter daherkamen, von denjenigen zu unterscheiden, mit denen tatsächlich hohe Geschwindigkeiten zu erreichen möglich war, ohne dass sie in Gleitfahrt übergingen. Während des Entwurfes und des Baues eines Wellenbinders war der Unterschied damals noch nicht festzustellen. Erst die Probefahrt konnte darüber Erkenntnisse bringen.
Die Gleitfahrt statt der Verdrängerfahrt wurde von den Konstrukteuren jener Zeit nur aus den zwei Gründen heraus nicht gewünscht, dass Gleiter sowohl sehr gut motorisiert als auch sehr leicht gebaut sein mussten, was bei den damaligen Möglichkeiten von Materialauswahl und Motorisierung im Gegensatz zu den gestiegenen Ansprüchen an den Komfort eines Lustbootes stand.
Generell tendierte man allerdings damals dennoch dazu, Wellenbinder eher nach dem Prinzip des Wellenbinder 1 (siehe Bild) zu bauen, da diese Boote bei ausreichender Motorisierung und falschen Proportionen zu gleiten beginnen konnten, was man für das kleinere Übel hielt, wenn man den „echten“ Wellenbinder nicht zu bauen erreicht hatte, während die Boote nach dem Prinzip des Wellenbinder 2 bei falscher Proportionierung auch bei stärkster Motorisierung gewöhnliche Verdränger blieben.
Im Verkauf damals (und auch auf dem heutigen Gebraucht-/Klassikbootsmarkt) wurde und wird aus einem gewissen kaufmännischen Geschick, aber oft auch aus Unkenntnis heraus, die Unterscheidung zwischen „echten“ und „falschen“ Wellenbindern nur selten gemacht und kann nur nach komplexen Berechnungen oder einer schlichten Probefahrt getroffen werden. Und sind Wellenbinder, gebaut in den Jahren 1910 bis etwa 1940, sofern sie die Wirren der Zeit bis heute überlebten, schon klassische Raritäten, so sind die „echten“ Wellenbinder unter ihnen als sehr, sehr selten zu betrachten.
Bei den seit der Jahrtausendwende modernen Neubauten von Booten im Retrolook der 1920er bis 1950er Jahre kommt der Wellenbinder als Konstruktion des Unterwasserschiffes praktisch nicht vor, obwohl gerade das 21. Jahrhundert die Möglichkeit böte, einen Wellenbinder schon auf dem virtuellen Zeichenbrett so zu entwerfen, dass das fertige Boot später im Tillerschen Sinn auch funktioniert.
Das Phänomen Surfen
Auch reine Verdränger oder Halbgleiter können ihre Rumpfgeschwindigkeit überwinden, wenn sie auf der Schiefen Ebene eines Wellenbergs nach unten fahren. Dieses Phänomen des Surfens entspricht genau dem, das ein Surfer nutzt, um sich mit hoher Geschwindigkeit auf einer Welle zu halten. Wellenreiter, Kanuten, aber häufig auch Segler streben diesen Zustand an, weil so höhere Geschwindigkeiten zu erreichen sind. Surfboards, die meisten Wildwasserkanus und moderne, leichte Segelyachten sind in solchen Situationen gut kontrollierbar.
Große Fahrzeuge oder Segelyachten mit ungünstigen Rümpfen, die für das Surfen nicht ausgelegt sind, können allerdings in ernste Gefahr geraten, wenn sie in ein Wellental schießen. Die größte Gefahr geht vom heftigen Aufprall im Wellental aus, der besonders größere Schiffe schwer beschädigen kann. Im Extremfall kann das Schiff sogar unterschneiden, sich also mit dem Bug in den nächsten Wellenberg bohren und sogar direkt aus dieser Bewegung "auf Tiefe gehen". Eine weitere Gefahr für große Schiffe ist das Querschlagen. Auf ihrer flachen Rumpfunterseite können sie seitwärts ins Wellental rutschen, wo sie dann vom seitlichen Aufprall der nächsten Welle regelrecht umgeworfen werden.
Der falsche Fünfziger
Etwa seit 1950 gibt es kleine, oft von Außenbordmotoren angetriebene Sportboote, für die der Ausdruck des „Wellenbinders“ wiederentdeckt wurde. Diese Boote entstanden aus Kanadiern mit Spiegelheck, die man mit Außenbordmotoren, Lenkrad und Windschutzscheibe versah, und nahmen schnell eine eigene Form und Größe an, die sehr den Autobooten und Limousinen des Motorbootbaus der Goldenen Zwanziger gleicht. Bei genauer Betrachtung sind es auch kleine Autoboote, nur dass die klassischen Autoboote Innenbordmotore besaßen. Diese „Wellenbinder“ der 1950er und 60er Jahre haben nichts gemein mit den Tillerschen und Engelbrechtschen Wellenbindern, besitzen nicht einmal die konkav-konvexe-Spantenform eines echten Wellenbinders, sondern sind per Rumpfkonstruktion echte, im Unterwasserschiff scharf geschnittene Gleiter in Knickspantbauweise. Was sie mit dem echten Wellenbinder vereint, ist der auch bei Verdrängungsfahrt gute Geradeauslauf bei sehr guter Manövrierfähigkeit. Die falschen Fünfziger (benannt nach den Fünfziger Jahren des Zwanzigsten Jahrhunderts) wurden in den Wirtschaftswunderjahren populär, da sie jeder halbwegs praktisch begabte Mensch in seiner Diele, seinem Schrebergarten oder in seiner Garage bauen konnte.
Heute wird dieser Bootstyp wieder modern, da es bereits richtige, elegante, kleine Mehrpersonenmotorboote sind und sie sich in modernen Leichtbauweisen dennoch mit dem kleinen PKW-Führerschein B trailern lassen (wenn der Außenbordmotor sich während der Fahrt auf der Straße im Kofferraum des Pkw und nicht am Boot befindet). Es gibt inzwischen zahlreiche Vereine, die sich mit dem Bau, dem Erhalt und dem Betrieb des Sportbootes der Kategorie des falschen Fünfziger-Wellenbinders befassen.
Weblinks
- yachtsportarchiv.de – Informationen über „gesamtdeutschen“ Bootsbau und Yachtsport von etwa 1910 bis etwa 1950
Einzelnachweise
- ↑ Die Yacht, Jahrgang 1935, Heft 30, Seite 11




Wikimedia Foundation.