- Wurzelortskurvenverfahren
-
Das Wurzelortskurvenverfahren (WOK) ist ein Verfahren zum Reglerentwurf aus der Regelungstechnik. Es basiert auf der Wurzelortskurve und verfolgt das Ziel, die Lage der Pole des geschlossenen Kreises so zu platzieren, dass der Regelkreis bestimmten Güteforderungen genügt. Das Ergebnis des Reglerentwurfes mit dem Wurzelortskurvenverfahren ist ein Regler, der im Allgemeinen eigene Dynamik enthält und beispielsweise ein P-, PI-, PID-Regler, aber auch ein Regler höherer Ordnung sein kann.
Inhaltsverzeichnis
Übersicht über den Entwurfsvorgang
Beim Reglerentwurf mit dem Wurzelortskurvenverfahren wird die Tatsache ausgenutzt, dass die Wurzelortskurve einen für den Entwurfsingenieur gut interpretierbaren graphisch Zusammenhang zwischen den Polen und Nullstellen der offenen Kette, und den Polen des geschlossenen Kreises herstellt. Letztere sollen zielgerichtet platziert werden. Die offene Kette ist eine Reihenschaltung aus Regler
 und Regelstrecke G(s) mit G(0) = ks:
und Regelstrecke G(s) mit G(0) = ks:G0(s) = K(s)G(s).
Solange der Regler noch unbekannt ist, wird K(s) = 1 verwendet. Der Entwurf mit dem Wurzelortskurvenverfahren erfolgt im Einzelnen in folgenden Schritten. Der Regler wurde in einen rein dynamischen Anteil
 mit
mit  , und eine proportionale Verstärkung kP zerlegt.
, und eine proportionale Verstärkung kP zerlegt.- Umsetzung der Güteforderungen in eine geeignete Form,
- Zeichnen der Wurzelortskurve,
- Festlegung der Dynamik des Reglers (seiner Pole und Nullstellen),
- Zeichnen der Wurzelortskurve und Festlegung der Reglerverstärkung.
- Simulation bzw. praktische Erprobung des Kreisverhaltens
- Wenn das Ergebnis nicht zufriedenstellend ist, Wiederholung ab 1. oder 2.
Zum Zeichnen der Wurzelortskurve stehen heute geeignete Software-Werkzeuge zur Verfügung, so dass das Hauptaugenmerk auf der Auswahl des Reglers liegt.
Güteforderungen
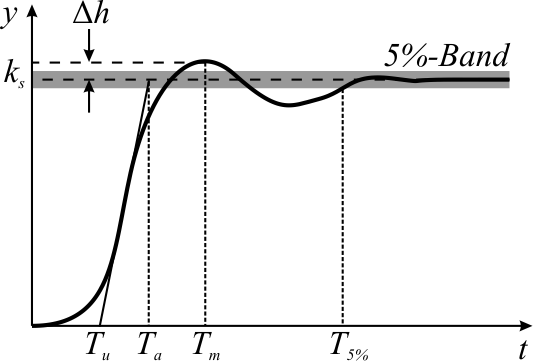
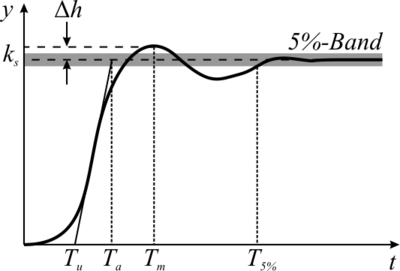 Kenngrößen des Verhaltens eines dynamischen Systems, dargestellt anhand der Sprungantwort. Die Überschwingweite Δh bezeichnet prozentual die größte Abweichung der Regelgröße vom statischen Endwert. Die Überschwingzeit Tm ist durch den Zeitpunkt, an dem das erste Maximum der Sprungantwort auftritt festgelegt. Die Beruhigungszeit T5% ist der letzte Zeitpunkt, zu dem die Sprungantwort in ein Band der Breite ±5% eintaucht.
Kenngrößen des Verhaltens eines dynamischen Systems, dargestellt anhand der Sprungantwort. Die Überschwingweite Δh bezeichnet prozentual die größte Abweichung der Regelgröße vom statischen Endwert. Die Überschwingzeit Tm ist durch den Zeitpunkt, an dem das erste Maximum der Sprungantwort auftritt festgelegt. Die Beruhigungszeit T5% ist der letzte Zeitpunkt, zu dem die Sprungantwort in ein Band der Breite ±5% eintaucht.
Die Güteforderungen sind üblicherweise im Zeitbereich in Form von Anforderungen an Sollwertfolge, das maximal zulässige Überschwingen Δh, die Überschwingzeit Tm, oder die Beruhigungszeit T5% gegeben. Sie müssen in Anforderungen an die Lage des dominierenden Polpaares in der komplexen Ebene übersetzt werden. Hierbei helfen folgende Zusammenhänge.
- Stabilität ist gegeben, wenn das dominierende Polpaar echt negativen Realteil hat.
- Sollwertfolge wird für sprungförmige Führungsgrößen erreicht, wenn die offene Kette einen Integrator enthält (Pol bei Null)
- Die Dämpfung d hängt mit dem komplementären Phasenwinkel des dominierenden Polpaars über die folgende Gleichung zusammen: cos ϕd = d, wobei ϕd = 180 − ϕ, wenn ϕ die Phase des dominierenden Polpaares bezeichnet.
- Die Überschwingzeit Tm erfüllt die Gleichung
 , wobei ωe den Betrag der Imaginärteile des dominierenden Polpaares bezeichnet.
, wobei ωe den Betrag der Imaginärteile des dominierenden Polpaares bezeichnet. - Die Überschwingweite Δh erfüllt die Gleichung
 .
.
Anhand dieser Regeln kann aus maximal zulässigem Überschwingen sowie Überschwingzeit oder Beruhigungszeit ein Zielgebiet für die gewünschte Lage der Polstellen des geschlossenen Kreises abgeleitet werden.
Bestimmung des dynamischen Anteils im Regler
Durch geeignete Platzierung von Polen und Nullstellen des Reglers muss sichergestellt werden, dass eine proportionale Reglerverstärkung kP existiert, so dass alle Güteforderungen erfüllt werden. Dadurch erhält man schrittweise
- Zur Sicherung der Sollwertfolge für sprungförmige Führungsgrößen muss ein einfacher Pol im Ursprung vorhanden sein. Ist dieser nicht schon durch die Strecke gegeben, muss ein Pol hinzugefügt werden, und der Regler erhält einen I-Anteil.
- Hat die Wurzelortskurve nun eine Form, so dass ein dominierendes Polpaar im Zielgebiet der komplexen Ebene durch geeignete Verstärkung existiert, kann zum nächsten Schritt 'Bestimmung der Verstärkung' (nächster Abschnitt) übergegangen werden.
- Verlaufen die Zweige der Wurzelortskurve noch ungeeignet, so müssen Pole und Nullstellen zum Regler an geeigneten Stellen im Pol/Nullstellen-Bild hinzugefügt werden, so dass durch sie die Form der Wurzelortskurve sich geeignet im Sinne des Zielgebiets verändert.
Der letzte Schritt ist aufwändig und erfordert unter Umständen wiederholtes Probieren. Er wird erleichtert durch Kenntnis der Konstruktionsregeln der Wurzelortskurve. Bei Rechnergestütztem Entwurf wird die modifizierte Wurzelortskurve sofort nach Platzierung eines Pols oder einer Nullstelle angezeigt.
Bei der Zusammenstellung des Reglers muss darauf geachtet werden, dass dieser realisierbar, also kausal ist. Das Ergebnis dieses Entwurfsschrittes ist ein dynamischer Regler
mit statischer Verstärkung eins. Generell sollte die dynamische Ordnung des Regler so klein wie möglich gehalten werden, denn jeder weitere Pol bringt weitere Verzögerungen und erschwert die Implementierung.Bestimmung der Verstärkung
Nachdem
 festgelegt ist, lautet die offene Kette
festgelegt ist, lautet die offene Kette  . Zur Bestimmung der Verstärkung kp ist wie folgt vorzugehen.
. Zur Bestimmung der Verstärkung kp ist wie folgt vorzugehen.- In der Wurzelortskurve wird ein Polpaar
 ausgewählt, das dominant ist und die Güteforderungen erfüllt.
ausgewählt, das dominant ist und die Güteforderungen erfüllt. - Anhand der Formel
 wird die Verstärkung
wird die Verstärkung  ermittelt, wobei si die Pole der offenen Kette einschließlich des dynamischen Reglers, und s0i die Nullstellen der offenen Kette einschließlich des dynamischen Reglers sind.
ermittelt, wobei si die Pole der offenen Kette einschließlich des dynamischen Reglers, und s0i die Nullstellen der offenen Kette einschließlich des dynamischen Reglers sind.  ist die gesuchte Reglerverstärkung.
ist die gesuchte Reglerverstärkung.
Implementiert wird nun der Regler
.Siehe auch
Literatur
- Jan Lunze: Regelungstechnik. Springer Verlag, Bd. 1 (2005) ISBN 3-540-28326-9, Bd. 2 (2006) ISBN 3-540-32335-X
- Heinz Unbehauen: Regelungstechnik. Vieweg, Braunschweig/Wiesbaden, Bd. 1 (2005) ISBN 3-528-93332-1, Bd. 2 (2000) ISBN 3-52873348-9
Wikimedia Foundation.