- Echolot
-
Das Echolot ist ein in der Schifffahrt verwendetes Gerät zur elektroakustischen Messung von Wassertiefen (Lotung). Gemessen wird die Zeit, die zwischen der Aussendung eines Schallimpulses (Wasserschall) und der Ankunft der vom Gewässerboden reflektierten Schallwellen verstreicht.
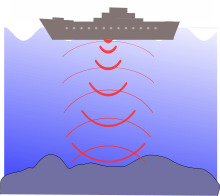 Schallausbreitung beim Echolot (schematisch)
Schallausbreitung beim Echolot (schematisch)
Inhaltsverzeichnis
Geschichte
Das Echolot wurde vom deutschen Physiker Alexander Behm entwickelt und 1913 im Deutschen Reich patentiert. Zur wirtschaftlichen Verwertung seiner Erfindung gründete er 1920 in Kiel die Behm-Echolot-Gesellschaft.
 Aufzeichnung der Echos auf einen Papierstreifen
Aufzeichnung der Echos auf einen Papierstreifen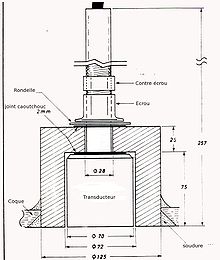 Schallwandler
SchallwandlerFunktionsweise
Das Echolot sendet über einen Geber ein Schallsignal nach unten. Dort wird das Signal vom Gewässerboden, aber auch Schiffswracks oder Fischschwärmen, reflektiert. Der reflektierte Impuls wird am Schiff empfangen. Aus der Laufzeit kann die Wassertiefe berechnet werden.
Die meisten Echolote verwenden Impulse mit einer Frequenz im Bereich zwischen 50 und 200 kHz (Ultraschall mit einer Wellenlänge von 3 cm bis 7,5 mm), die über einen Ultraschallgeber (meist ein Piezolautsprecher) im Schiffsboden oder am Heck abgestrahlt werden. Die Schallwellen werden am Gewässerboden reflektiert und vom Schallwandler empfangen. Aus der Laufzeit der Wellen und der Ausbreitungsgeschwindigkeit wird die Tiefe ermittelt.
Die Zahl der Impulse pro Sekunde kann bei nicht zu großer Wassertiefe zwischen etwa 5 und 40 liegen.
Der Öffnungswinkel des Messstrahls liegt meistens zwischen 5° und 20° (An dieser Grenze ist nur noch die Hälfte der Signalleistung von der Mitte messbar). Dadurch ergibt sich am Boden ein flächiger Messbereich, dessen Durchmesser proportional zur Tiefe zunimmt. Je nach Krängung des Schiffes, aber auch bei nicht senkrechter Montage des Gebers, entstehen durch schräge Messungen zu große Laufzeitwerte und falsche (zu große) Tiefen.
Im Idealfall entspricht das erste Echo der gesuchten Tiefe. Bei geneigtem bzw. unregelmäßigem Untergrund oder bei Schlick und Schlamm entstehen Messfehler und sind Korrekturen notwendig. Die Beschaffenheit des Untergrunds kann durch die Verwendung von zwei Frequenzen bestimmt werden. Die üblichen 100-200 kHz werden schon an Schichten geringer Dichte reflektiert, die tiefer eindringende niedrige Frequenz von 15 bis 50 kHz (Wellenlänge 3 cm bis 10 cm) hingegen erst an festeren Schichten.
Messbereich
Der Tiefenmessbereich variiert je nach Sendeleistung und Störgeräuschen. Einfache Geräte mit einer Sendeleistung zwischen 100 und 1000 Watt erreichen meist mehr als 100 Meter.
Berechnung der Schallgeschwindigkeit im Wasser
Die Schallgeschwindigkeit im Wasser ist abhängig von der Temperatur, vom Salzgehalt und vom Druck; und diese drei Größen sind ihrerseits abhängig von der Wassertiefe. Die Schallgeschwindigkeit beträgt etwa 1500 m/s im Salzwasser und 1463 m/s im Süßwasser. In großen warmen salzhaltigen Tiefen (Rotes Meer) kann sie bis 1900 m/s betragen.[1]
Für genaue Messungen müssen diese Parameter jeweils bestimmt und bei der Umrechnung der Laufzeit in eine Wassertiefe berücksichtigt werden. Dazu existieren verschiedene empirische Formeln.[2] [3][4]
Fächerecholot
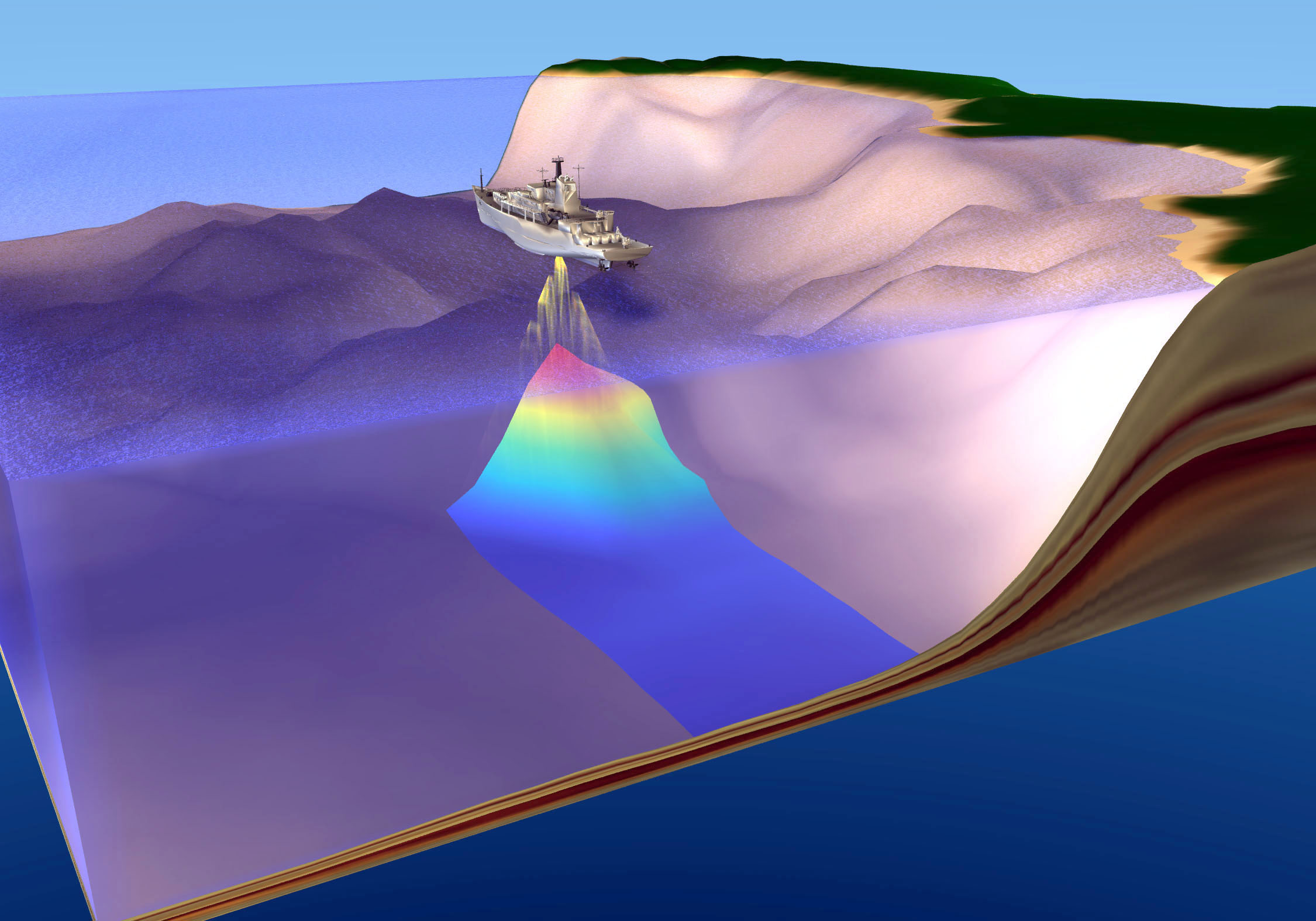
 Fächerecholot
FächerecholotFür die Vermessung von Gewässersohlen, Flussmündungen und Flachküsten werden Fächerlotsysteme eingesetzt. Durch ein Strahlenbündel wird die Vermessung genauer und bei mehrfacher Überdeckung der gemessenen Streifen gut kontrollierbar.
Fächerecholote werden zunehmend auch auf Yachten und von Anglern und Fischern (Fischfinder) verwendet.
Das Fächerecholot sendet nacheinander mehrere hundert Messstrahlen mit einem Öffnungswinkel von etwa 1,5°. Je nach Verteilung der Strahlen quer zur Fahrtrichtung entsteht ein Fächer von 120 bis 150° Breite. Die Fächeröffnung kann bei modernen Systemen dem Gewässerprofil, der Schiffsgeschwindigkeit und der Wassertiefe angepasst werden. Zur Vermessung von Hafenanlagen werden Fächerwinkel bis 210° verwendet. Der Fächer erfasst Streifen des Meeresbodens entlang des Schiffskurses. Je größer die Wassertiefe, desto breiter ist der erfasste Streifen. Fügt man mehrere überlappende Streifen zusammen, kann daraus ein digitales Geländemodell berechnet und schließlich eine topografische Karte erstellt werden.
Fischfinder
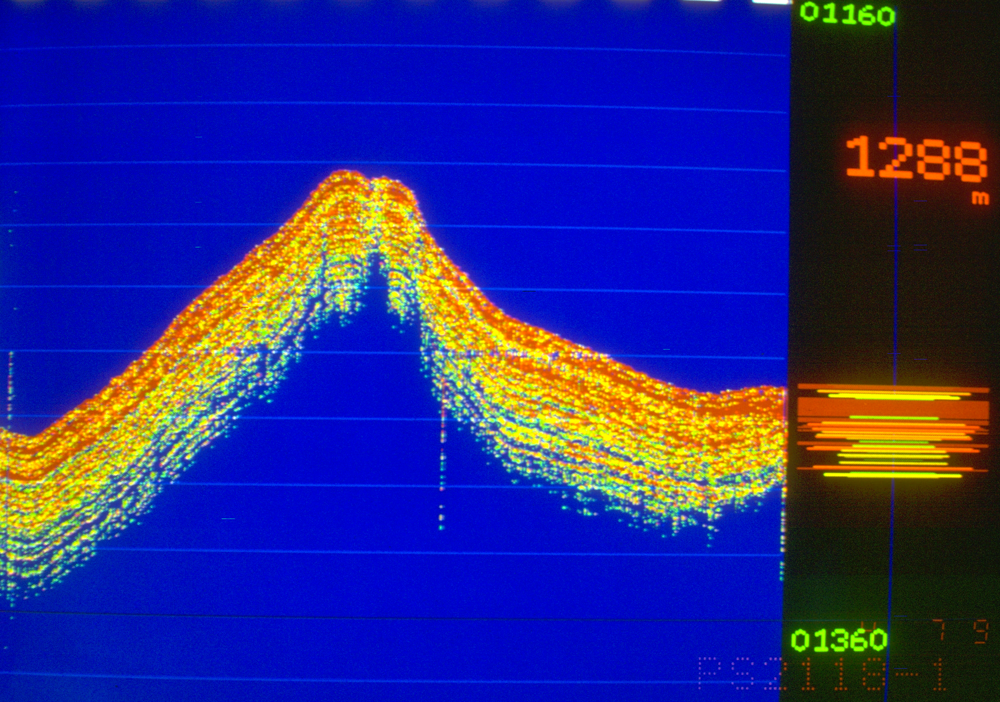
 Darstellung der Echos auf einem Farbbildschirm
Darstellung der Echos auf einem FarbbildschirmDer Fischfinder zeigt auf einem Farbbildschirm ein Profil des Meeresbodens. Boden, Bewuchs und Fischschwärme können unterschieden werden. Echos von Fischen werden dabei besonders hervorgehoben.
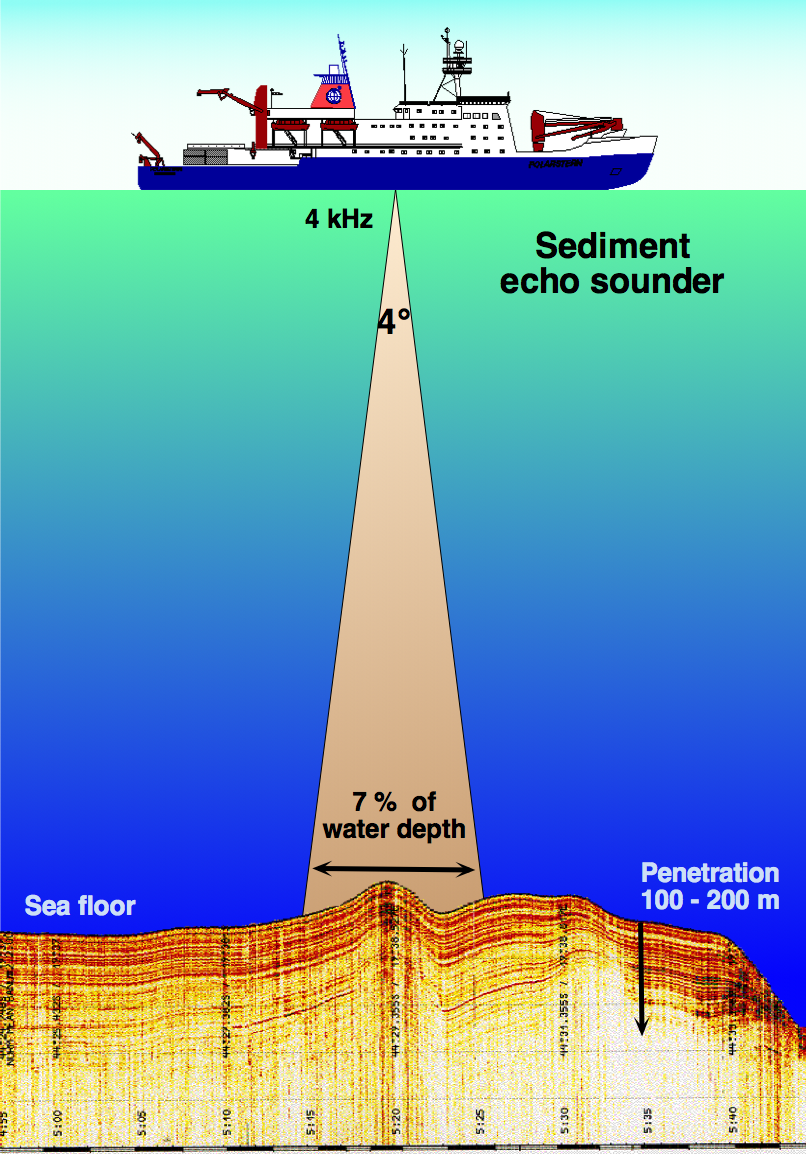
Sedimentecholot
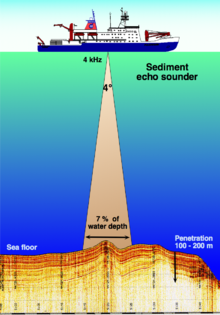
Das Sedimentecholot verwendet niedrigere Schallfrequenzen im Bereich zwischen 0,5 und 6 kHz (Wellenlänge 3 m bis 25 cm) und dringt damit bis zu 100 m in den Meeresboden ein. Es liefert Geologen und Geophysikern Informationen über Härte und Beschaffenheit der Bodenschichten (Sedimente). Diese Bodenbeschaffenheit ist auch wichtig für den Wasserbau.
-

Sediment-Profil
Verwandte Verfahren
Die Echoortung ist ein eng verwandtes Verfahren, mit dem sich auch die Lage von Objekten, wie Schiffen oder Fischen, bestimmen lässt. Es wird sowohl in der Natur, so von Zahnwalen und Fledermäusen angewendet als auch bei verschiedenen aktiven Sonar-Verfahren.
Vereinzelt wird eine vergleichbare Methode auch in der Luftfahrt verwendet. Das Sonic Altimeter dient zur Höhenmessung von Flugzeugen über Grund.
Das Autofokus-System einiger Fotoapparate arbeitet mit einem Ultraschall-Entfernungs-Messgerät.
Mit dem Geoscanner werden Bodenveränderungen sichtbar gemacht.
Sonstiges
General Bathymetric Chart of the Oceans (GEBCO) ist ein bathymetrischer, weltweiter Datensatz, der auf zusammengetragenen Daten aus Schiffs-Echoloten basiert.
Echolote werden auch zur Wracksuche eingesetzt.
Weblinks
 Wiktionary: Echolot – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Echolot – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen Commons: Echo sounders – Sammlung von Bildern, Videos und Audiodateien
Commons: Echo sounders – Sammlung von Bildern, Videos und AudiodateienVideoerklärung zur Echolot und Fishfinder Technik
Einzelnachweise
- ↑ Fouad Ghattas, Springer
- ↑ Formeln zur Berechnung der Schallgeschwindigkeit in Seewasser (engl.)
- ↑ Quantum Hydrometrie
- ↑ Fishfinder in der englischen Wikipedia
Kategorien:- Akustisches Messgerät
- Nautik
- Ultraschall
- Wasserschall
-


Wikimedia Foundation.