- Lunar rover
-
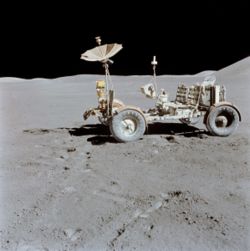 LRV von Apollo 15
LRV von Apollo 15Das Lunar Roving Vehicle (LRV) war ein elektrisch betriebenes Fahrzeug, das in den USA für den Einsatz auf dem Mond konstruiert wurde. Es wurde während der letzten drei der sogenannten J-Klasse-Apollo-Missionen (Apollo 15, 16 und 17) mitgeführt, um die Beweglichkeit der Astronauten zu erhöhen. Seine Entwicklung begann 1969 unter der Leitung des ungarischen Physikers Ferenc Pavlics in dem Forschungsinstitut von General Motors in Santa Barbara im Auftrag von Boeing Aerospace Corporation und dauerte lediglich 17 Monate. Den von Pavlics entworfenen Rädern war es zu verdanken, dass das LRV - von dem bis heute drei Exemplare auf dem Mond geparkt sind - sich unter den widrigen Bedingungen leicht bewegen konnte.
Inhaltsverzeichnis
Aufbau
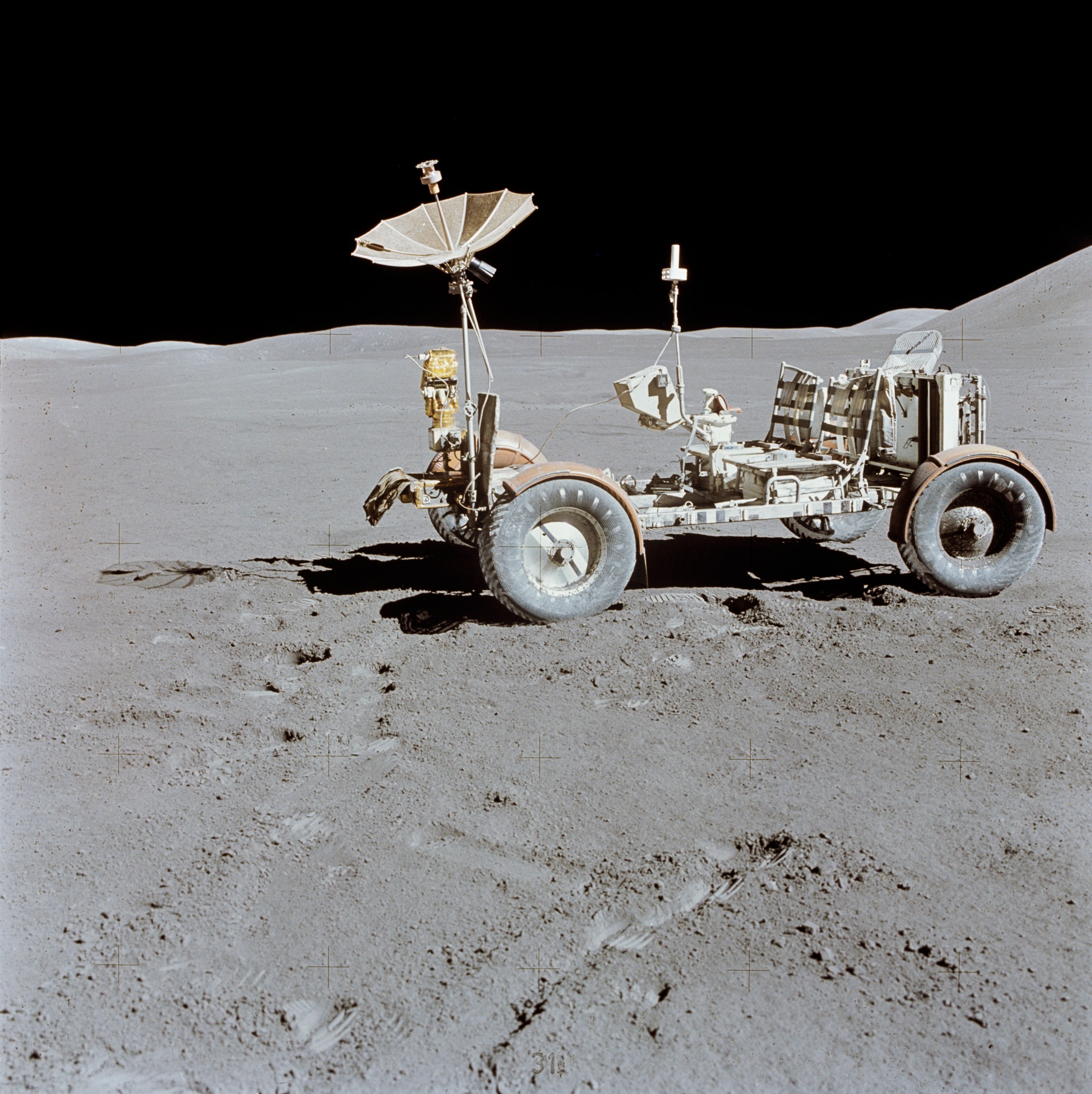
 LRV von Apollo 15
LRV von Apollo 15Das LRV war 3,1 m lang und hatte einen Radstand von 2,3 m. Es bestand hauptsächlich aus Aluminium und wog 210 kg. Auf dem Mond konnten maximal 490 kg zugeladen werden, davon entfielen 353 kg auf die Astronauten und ihre Lebenserhaltungssysteme, 45,4 kg auf Kommunikationsausstattung, 54,5 kg auf wissenschaftliche Nutzlast und 27,2 kg auf Gesteinsproben. Vollbeladen betrug die Bodenfreiheit 36 cm. Das Chassis war faltbar konstruiert, so dass es bei einem Packmaß von 0,90 x 1,50 x 1,70 m unter der Mondlandefähre transportiert werden konnte. Der Aufbau dauerte ungefähr 20 Minuten. Angetrieben wurde das LRV von je einem 0,18-kW-Elektromotor pro Rad, der mit diesem über ein mit 80:1 untersetztes Getriebe verbunden war. Die Lenkung wurde über je einen 0,072-kW-Elektromotor pro Achse geregelt; der Fahrer steuerte das LRV per Joystick. Für die Stromversorgung waren zwei 36-Volt- Silber-Zink-Batterien mit einer Kapazität von 121 Ah zuständig; damit war eine Höchstgeschwindigkeit von 13 km/h und eine Strecke von maximal 92 km möglich. Navigiert wurde mittels eines Gyroskops und eines Kilometerzählers. Der Computer berechnete aus deren Daten die aktuelle Position relativ zum Landemodul. Die Kommunikationsrüstung sowie zwei Kameras waren an der Front des LRV befestigt.
Einsätze
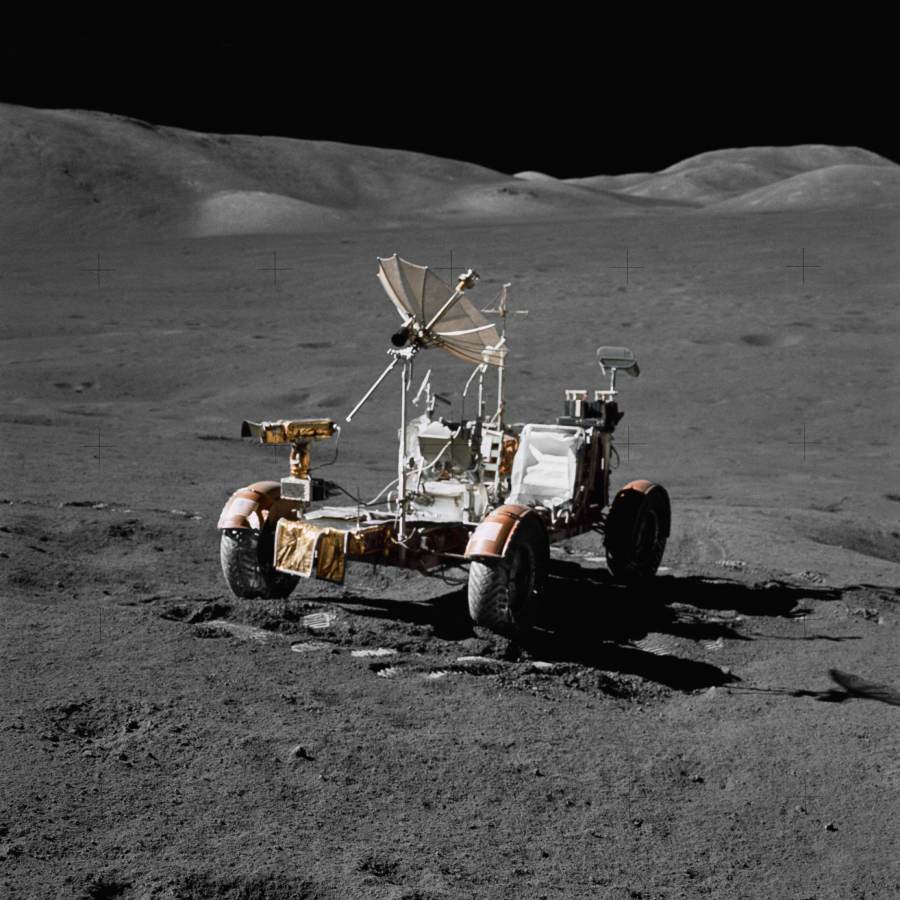
 Filmaufnahme aus dem fahrenden Lunar Rover
Filmaufnahme aus dem fahrenden Lunar RoverApollo 15
- Gefahrene Strecke: 27,9 km
- Größte Entfernung vom LM: 5 km
Nachdem der Aufbau des LRV mehr Zeit als geplant in Anspruch nahm und die Steuerung der Vorderachse nicht funktionierte, wurde während der ersten Ausfahrt zur Hadley-Rinne das neue Gefährt ausgiebig getestet. Insbesondere das Navigationssystem erwies sich dabei als sehr exakt. Während zweier weiterer EVAs besuchte man den Mons Hadley und ein weiteres Mal die Hadley-Rinne und sammelte insgesamt 76,8 kg an Gesteinsproben.
Apollo 16
- Gefahrene Strecke: 26,7 km
- Größte Entfernung vom LM: 4,5 km
Während zweier EVAs erkundete man den Stone Mountain sowie den North-Ray-Krater. Beim Rückflug wurde erstmalig versucht, mit der auf dem LRV befestigten Kamera die startende Aufstiegsstufe der Mondlandefähre aufzunehmen. Auf dieser Mission versagte die Hinterachssteuerung des LRV. Die Vorderachssteuerung funktionierte diesmal.
Apollo 17
- Gefahrene Strecke: 35,9 km
- Größte Entfernung vom LM: 7,6 km
Besucht wurden das Nord- und Südmassiv in der Nähe des Littrow-Kraters. Dem LRV von Apollo 17 hat man auch die legendäre Aufnahme des Rückstarts vom Mond zu verdanken. Bereits bei der Vorgängermission war getestet worden, ob es möglich sei, den Rückstart mit der auf dem LRV montierten Fernsehkamera aufzunehmen. Bei Apollo 17 steuerte Mission-Control-Operator Ed Fendell die Kamera von der Erde aus und hielt trotz der durch die Lichtgeschwindigkeit bedingten Verzögerung der Steuerungsbefehle um etwa 2 s das startende Raumschiff im Visier, wofür er später von der deutschen Fernsehzeitschrift HÖRZU mit der Goldenen Kamera ausgezeichnet wurde.

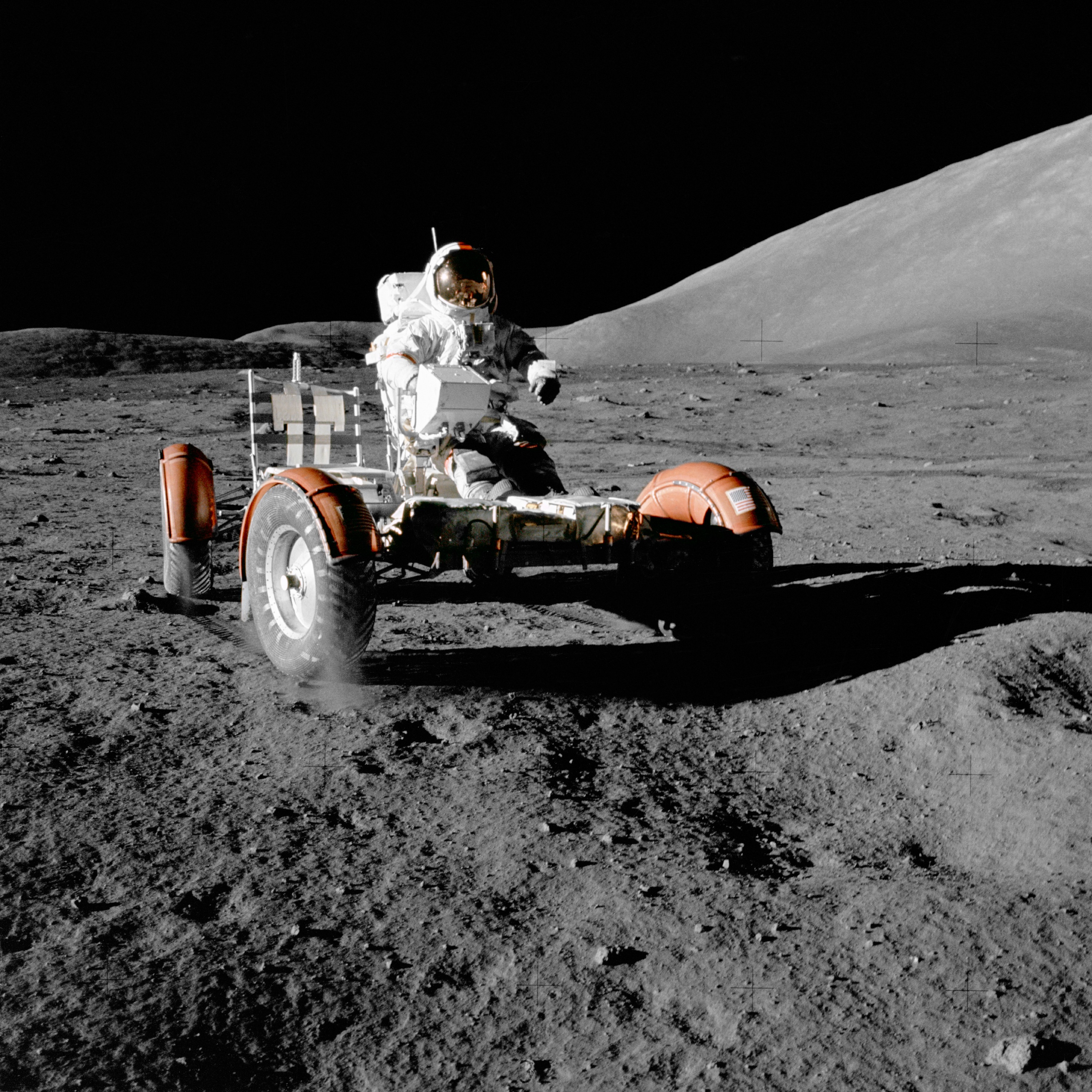
LRV von Apollo17

Eugene Cernan mit dem LRV der Apollo-17-Mission am 11. Dezember 1972

Instrumente des LRV
Siehe auch
Literatur
- Anthony H.Young: Lunar and planetary rovers - the Wheels of Apollo and the Quest for Mars. Springer, Berlin 2007, ISBN 0-387-30774-5
Weblinks
- Rückstart von Apollo17, mit der LRV-Kamera aufgenommen (MPG, 36 s, 4,8 MB)
- Das komplette LRV-Benutzerhandbuch (englisch)
- LRV in der Encyclopedia Astronautica (englisch)
- NASA-NSSDC: Apollo LRV (englisch)


Wikimedia Foundation.