- SCARA-Roboter
-
 SCARA-Roboter
SCARA-Roboter
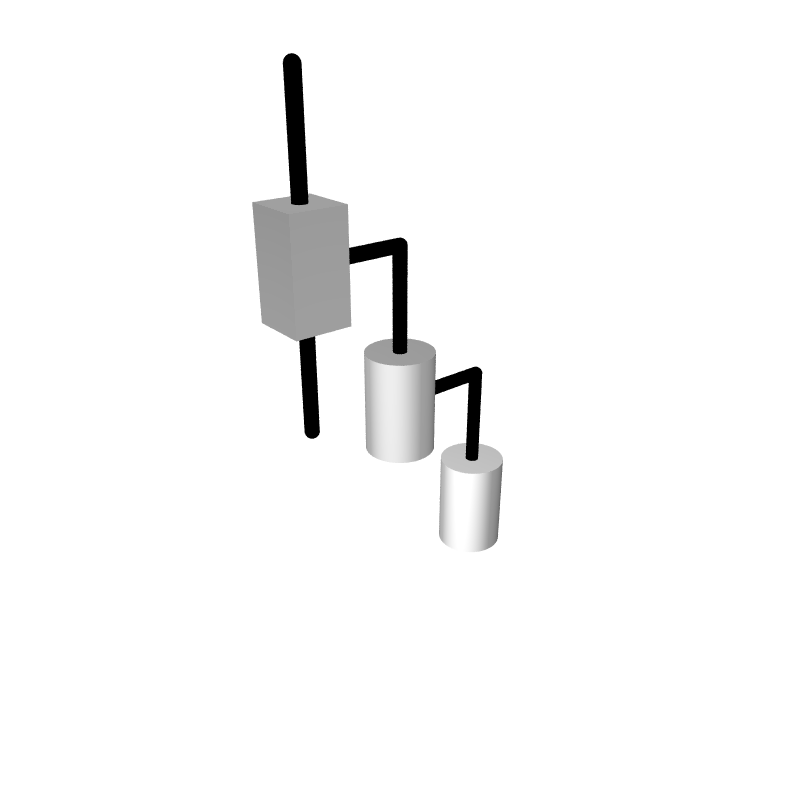
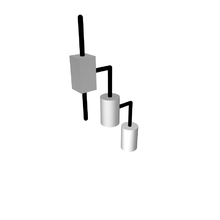 Schematische Darstellung der Achskonfiguration eines SCARA-Roboters
Schematische Darstellung der Achskonfiguration eines SCARA-RobotersDer SCARA-Roboter (Abkürzung für engl. Selective Compliance Assembly Robot Arm) ist ein besonderer Typ Industrieroboter, dessen Aufbau einem menschlichen Arm ähnelt und daher auch als „horizontaler Gelenkarmroboter“ bezeichnet wird.
Inhaltsverzeichnis
Aufbau und Eigenschaften
Ein SCARA-Roboter besitzt in der Regel vier Achsen und vier Freiheitsgrade. Sämtliche Achsen sind als serielle Kinematik ausgeführt, d.h. der Koordinatenursprung der folgenden Achse ist abhängig von der Position der vorhergehenden. Bei einem SCARA-Roboter sind die erste und zweite Achse rotatorischer Natur, die dritte und die vierte Achse sind vielfach aus einem Bauelement hergestellt (der Kugelrollspindel), und erlauben eine rotatorische und eine Linearbewegung. Das Werkzeug des Roboters wird am unteren Ende der Z-Achse montiert.
SCARA-Roboter gibt es in unterschiedlichen Größen - die Reichweite der am weitesten verbreiteten Modelle kann zwischen 100 mm und 1.200 mm liegen. Roboter dieses Typs können Nutzlasten im Bereich von 1 kg bis zu 200 kg handhaben.
Der Arbeitsbereich eines solchen Roboters ist auf Grund seiner Armgeometrie typischerweise nierenförmig. Die konkreten Abmessungen hängen dabei natürlich von den konkreten Randbedingungen wie Armlängen, Winkel etc. ab.
Einsatz
Dieser Robotertyp wurde auf Grund seiner schnellen Bewegung speziell für sogenannte Pick-and-Place-Anwendungen, bei der ein Bauelement von Platz (a) nach Platz (b) gebracht wird (typisch für Handhabungs- und vorbereitende Montagearbeiten), entwickelt. Ein Nachteil des Scara-Roboters besteht darin, dass er stets nur auf einer Arbeitsebene hantieren kann, da ihm für nicht planparallele Flächen die Freiheitsgrade fehlen. Für solche Anwendungen sind 5- oder 6-Achs-Roboter geeignet.
Hersteller
 Deutschland:
Deutschland:
- KUKA Roboter
- DÜRR
 Japan:
Japan:
- JANOME INDUSTRIAL [1]
- IAI
- Denso
- Epson
- Hirata
- Mitsubishi Automation
- MOTOMAN
- Yamaha-Robotics
 Schweiz:
Schweiz:
- Stäubli AG hat die Produktion von Bosch Rexroth übernommen.
- ABB Robotics
 USA:
USA:
Literatur
- Alois Knoll, Thomas Christaller: Robotik. Autonome Agenten. Künstliche Intelligenz. Sensorik. Embodiment. Maschinelles Lernen. Serviceroboter. Roboter in der Medizin. Navigationssysteme. Neuronale Netze. RoboCup. Architekturen.. Fischer, Frankfurt 2003, ISBN 978-3-5961-5552-1.
- Wolfgang Weber: Industrieroboter. Methoden der Steuerung und Regelung. Mit 33 Übungsaufgaben. Fachbuchverlag Leipzig, 2002, ISBN 978-3-4462-1604-4.

Wikimedia Foundation.