- Kugelrollspindel
-
 Kugelgewindetriebe
KugelgewindetriebeEin Kugelgewindetrieb (KGT) ist die Gesamtheit eines Wälzschraubtriebes mit Kugeln als Wälzkörper. Er dient zur Umsetzung einer Drehbewegung in eine Längsbewegung oder umgekehrt (Definition nach DIN 69051).
Im Vergleich zu normalen Gewindetrieben ergeben sich drei Vorteile:
- der Verschleiß wird kleiner,
- die erreichbare Geschwindigkeit wird größer,
- die Präzision wird gesteigert.
Wirtschaftlich betrachtet sind damit geringere Wartungskosten, geringere Bearbeitungszeiten und niedrigere Ausschussquoten verbunden.
Inhaltsverzeichnis
Verwendung
Das Haupteinsatzgebiet sind Werkzeugmaschinen wie z. B. Drehmaschinen, auf denen Werkstück- bzw. Werkzeugträger positioniert werden müssen. Das zu bewegende Teil ist meistens an der Mutter befestigt und gleichzeitig über Linearführungen gelagert. Kugelgewindetriebe haben die früher gebräuchlichen Trapezgewindespindeln in vielen Bereichen des Maschinenbaus fast vollständig ersetzt. Neue Bauarten erschließen zudem weitere Einsatzgebiete, in denen bisher meist Hydrauliksysteme Verwendung fanden wie zum Beispiel bei Pressen und Spritzgießmaschinen.
Aufbau und Funktionsweise
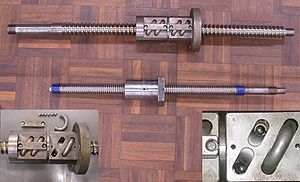
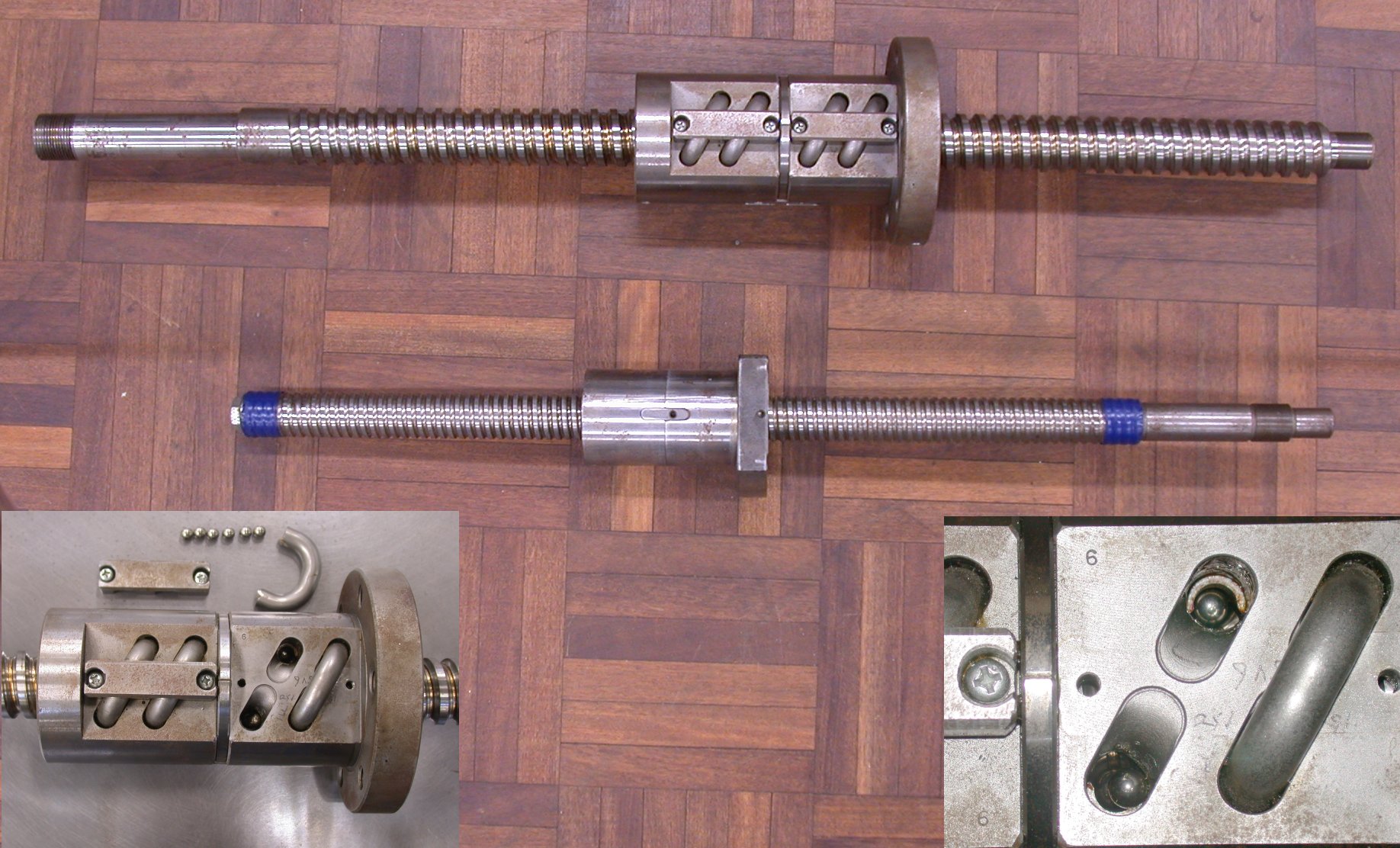
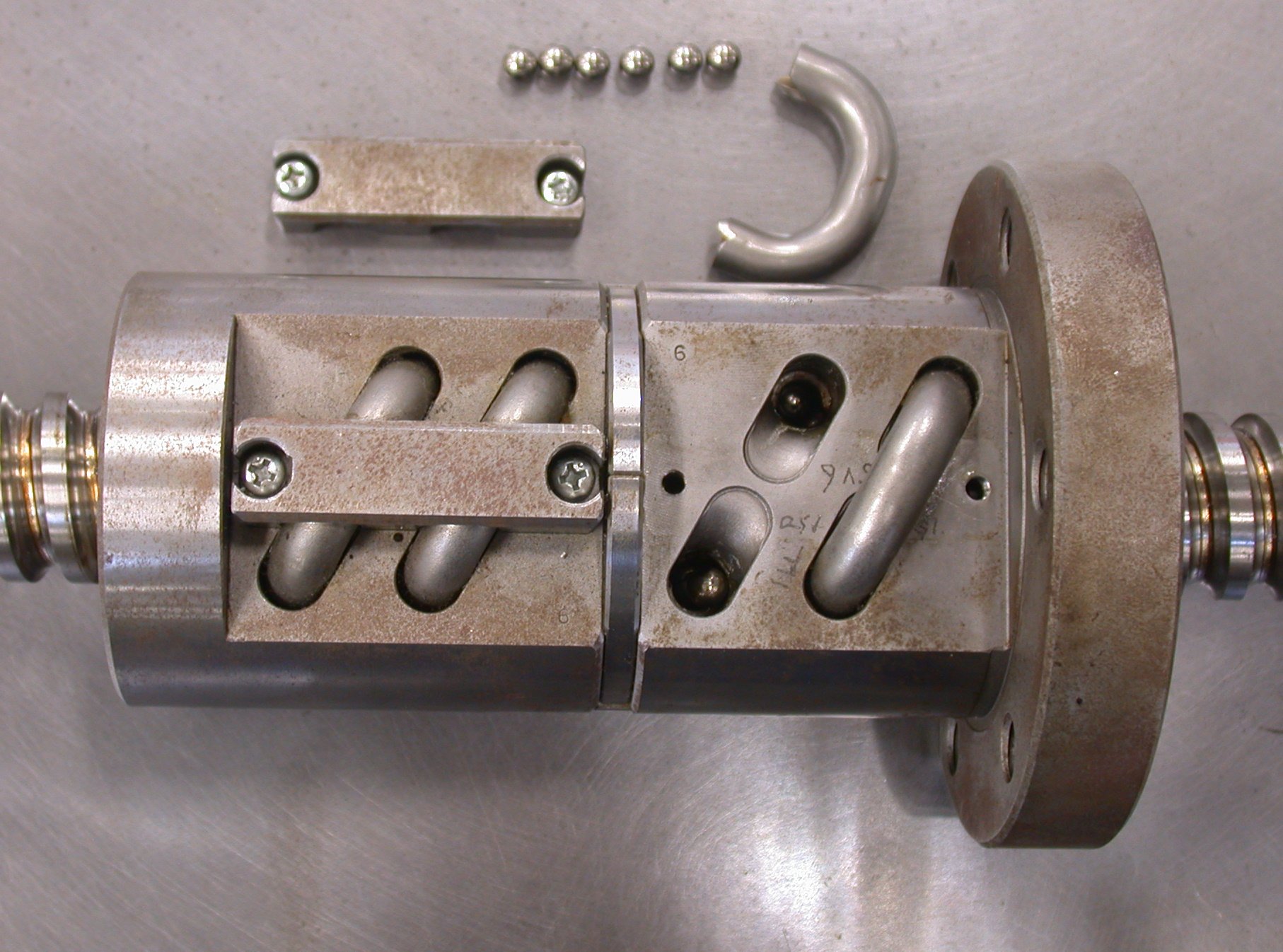
Ein Motor treibt die Spindel entweder direkt oder über Getriebe und Riementriebe an. Zwischen Spindel und Mutter bewegen (abwälzen/abrollen) sich in Laufrillen Kugeln, die beim Drehen der Spindel axial wandern. Der Rückführkanal in der Spindelmutter befördert die Kugeln wieder zurück und schließt damit den Kreislauf, in dem die Kugeln zirkulieren.
Spindelgeometrie
Die umlaufenden Kugeln berühren im Idealfall (d.h. spielfrei) beide Flanken des Gewindes an je einem Punkt (gotische Laufrille). Falls Spiel vorhanden ist, kann nachjustiert werden.
Ein kennzeichnendes Merkmal der Kugelumlaufspindel ist ihre Steigung. Sie wird im mm angegeben und bedeutet die in Millimeter gemessene, geradeaus zurückgelegte Strecke (Hub) der Spindelmutter pro Umdrehung der Spindel. Diese Steigung ist nicht identisch mit der Steigung derjenigen Rampe, welche sich durch Abrollen der Laufrille zu einer schiefen Ebene ergibt. Jene Rampensteigung ist der Quotient der beiden Katheten des Steigungsdreiecks (Hubstrecke pro Umfang), eine dimensionslose Zahl und wird üblich in Prozent angegeben. Die Konvention, Spindelsteigungen in Millimeter anzugeben und damit auf Umdrehung bzw. Drehzahl statt auf den Umfang zu normieren, erleichtert die meisten Berechnungen zur Dimensionierung einer Maschinenachse, da ab dem Antriebsmotor in der Regel Drehzahlen und Drehmomente übermittelt werden. Die Steigung ergibt mit der Drehzahl im Produkt bequem den Vorschub. Allerdings spielt die Geometrie der zur Spindel aufgerollten Rampe eine wesentliche Rolle bei der konstruktiven Optimierung der Kugelgewindetriebe.
Kugelumlaufspindeln sollen bei hoher Präzision hohe Vorschübe unter sehr unterschiedlichen Lasten ermöglichen. Bei Kugellagern hat sich die Angabe der Abrollgeschwindigkeit der Kugeln als Kriterium für das technisch Erreichbare bewährt. Die technologische Grenze bei Kugellagern lag im Jahr 1996 bei rund 3000 m/min (180 km/h).
Kugelgewindetriebe erreichten diese Geschwindigkeit zur gleichen Zeit bei Weitem noch nicht, weil man die Spindelmutter nicht mit fest integriertem Kugelkäfig konstruieren kann. Daher „klackern“ die Kugeln gegeneinander und gegen die Rillen von Mutter und Spindel. Hauptsächlich durch diesen Effekt rollt ein moderner Kugelgewindetrieb mit typisch unter 200 m/min ab. Ein wichtiger begrenzender Faktor für den erreichbaren Vorschub ist also die maximale Abrollgeschwindigkeit der Kugeln an der Laufrille. Um möglichst viel dieses Potenzials für die Hubbewegung zu nutzen, werden Hochgeschwindigkeitsspindeln mit großen Steigungen und kleinen Durchmessern konstruiert. Neuere Entwicklungen sind Kugelgewindetriebe mit Kugelkette, die verhältnismäßig geräuscharm laufen, da der oben beschriebene Effekt des „Klackerns“ bei diesen modernen Systemen stark reduziert werden konnte.
Der Quotient aus Steigung und Umfang der Spindel kennzeichnet die Form der Schraubenlinie durch Abbildung auf die entsprechende, abgerollte Rampe. Dieser Quotient wird auch als Übersetzungsverhältnis der Spindel bezeichnet. Ein Übersetzungsverhältnis von 1:1 bedeutet nach dieser Definition 100 % Steigung der Rampe. Die Steigung moderner Hochgeschwindigkeitsspindeln beträgt ein Mehrfaches des jeweiligen Spindeldurchmessers. Verhältnisse von 3:1 sind erst seit 1996 realisierbar. Die Begrenzung ergibt sich hier aus der Notwendigkeit, einen Kompromiss mit der Anforderung mechanischer Stabilität zu finden: die Spindel überträgt mit ihrer Laufrille die Kräfte. Zu dünne Spindeln beginnen unter dem Einfluss der Radialkomponenten dieser Kräfte zu schwingen. Für die Charakterisierung der Kräfteaufteilung werden Steigungswinkel und Lastwinkel nach DIN 69051 angegeben. Zur Kompensation der störenden Schwingungen dünner Hochgeschwindigkeitsspindeln können speziell abgestimmte, paarweise eingesetzte Spindelmuttern konstruiert werden, die als Schwingungsdämpfer funktionieren.
Maßnormen für Kugelgewindetriebe gibt es nur für die Anschlussmaße. Daher variieren die Abmessungen der Standardspindeln führender Hersteller zum Teil erheblich. Meist sind zu jedem angebotenen Spindeldurchmesser jeweils mehrere verschiedene Steigungen verfügbar, allerdings in einem nicht allzu breiten Rahmen des Verhältnisses Steigung zu Durchmesser.
Das Standardsortiment am Markt reicht von sogenannten Miniaturkugelgewindetrieben, deren Spindelsteigungen im Bereich von ca. 2 bis 16 mm bei Spindeldurchmesser zwischen 6 und 20 mm liegen, bis hin zu Gewindetrieben mit Steigungen von 50 mm und Durchmessern bis zu 125 mm. Spindellängen werden je nach Typ zwischen einigen Zentimetern bis hin zu mehreren Metern angeboten. Häufig werden von den Herstellern auch standardisierte Spindelendenbearbeitungen zur Lagerung der Spindeln und zur Verbindung mit dem Antriebsmotor angeboten.
Muttergeometrie
 Aufbau der Mutter eines Kugelgewindetriebes
Aufbau der Mutter eines KugelgewindetriebesZur Geometrie der Mutter lese man den Artikel zur Kugelumlaufmutter.
Spiel und Vorspannung
Um das Spiel zwischen Spindel und Mutter auf nur wenige µm zu reduzieren oder vollkommen zu eliminieren, stehen verschiedene Möglichkeiten der Vorspannung zur Auswahl. Häufig werden zwei Gewindemuttern gegeneinander verspannt.
Weitere Methoden zur Vorspannung bestehen darin, durch eine gezielte Sortierung Kugeln leicht größer als zur Laufrille passend zu verwenden oder in der Mitte der Mutter einen absichtlichen Steigungsversatz (Shift) einzuarbeiten.
Beanspruchung
Kugelgewindetriebe können je nach Spindeldurchmesser und Spindelsteigung dynamische Lasten zwischen wenigen Kilonewton (kN) bis in den dreistelligen kN-Bereich aufnehmen.
Die höhere Rollreibung durch Vorspannung erzeugt bei hohen Drehzahlen (z. B. Bewegung einer Maschine im Eilgang) viel Wärme, welche aufgrund der Längenausdehnung der Spindel die Präzision der betroffenen Maschinenachse beeinträchtigt. Hohe axiale Kräfte sowie schnelle Drehzahlen der Spindel üben außerdem starke Belastungen auf Gewindegang und Kugel aus. Unter Belastung erhöht ein Reiben der Kugeln aneinander das zur Bewegung nötige Drehmoment und verursacht Verschleiß. Übermäßiger Erwärmung kann mit hohlen Gewindespindeln, durch die eine Kühlflüssigkeit fließt, entgegengewirkt werden.
Verschleißminderung
Durch passende Herstellungsverfahren und Konstruktion der Bauteile kann den verschiedenen Arten der Beanspruchung mehr oder weniger Rechnung getragen werden.
Zwischen zwei normale, tragende Kugeln kann jeweils eine um wenige Mikrometer kleinere Distanzkugel eingesetzt werden. Diese Distanzkugeln üben keinen Druck auf die Gewindeflanken aus und unterliegen daher nicht dem Zwang mitzulaufen, sondern werden von den tragenden Kugeln entgegen der eigentlichen Drehrichtung bewegt. Dieses Verfahren zur Verringerung des Verschleißes stellt allerdings nur einen Kompromiss dar, denn das Fehlen tragender Kugeln vermindert die axiale Belastbarkeit des Gesamtsystems.
Eine weitere Möglichkeit zur Reduzierung der Reibung zwischen den Kugeln bieten Kugelkäfige aus Kunststoff, deren Realisierung jedoch sehr teuer ist, weswegen sie meist nur bei Hochgeschwindigkeits-Kugelgewindetrieben eingesetzt werden.
Herstellung
Übliche Verfahren zum Einbringen der Laufrillen in die Gewindespindel sind Gewindewirbeln, Rollen und Schleifen. Sowohl die Kugel als auch die Oberfläche der Laufrille ist immer gehärtet, wobei die Laufrille für schnell drehende Spindeln beschichtet wird.
Vergleich von Kugelgewindetrieb und Trapezgewindespindel
- Der Kugelgewindetrieb kann gegenüber der Trapezgewindespindel mit wesentlich geringerem Spiel eingestellt werden ("spielfrei"), weist daher einen entscheidend kleineren Losefehler auf und ist als Antriebskomponente daher präziser.
- Zugleich wirkt beim Kugelgewindetrieb eine deutlich kleinere Reibung, obwohl für Führungen allgemein Reibung und Spiel reziproke Eigenschaften darstellen. Über Energieverbrauch und Verschleißkalkulation resultieren beim Einsatz des Kugelgewindetriebs für die meisten Konstruktionen daher relevante Einsparungen.
- Der zweite Nutzen aus der geringen Reibung der Kugelumlaufspindel ist die massiv reduzierte Wärmeentwicklung gegenüber der Trapezgewindespindel beim Abarbeiten vergleichbarer Aufgaben. Dies erhöht die Präzision einer entsprechend ausgestatteten Maschinenachse.
- Schließlich vermittelt die geringe Reibung der Kugelumlaufspindel eine Leichtgängigkeit mit ganz geringem Losbrechmoment und daraus resultierend sehr geringem Stick-Slip-Effekt. Auch dies verbessert unmittelbar die Präzision und die absolute Genauigkeit einer Maschinenachse.
- Die Effekte erlauben in ihrer Summe, dass der Kugelgewindetrieb seiner Maschinenachse bei heutigen Stand der Technik (2007) sehr hohe Vorschübe bis 200 m/min vermitteln kann. Dies reduziert Fertigungszeiten und Produktionskosten, eröffnet aber zudem auch den Weg zu neuen Technologien der Materialbearbeitung.
Weiterentwicklungen
Adaptronischer Kugelgewindetrieb
Bei modernen, adaptronischen Kugelgewindetrieben variieren zwischen den Muttern eingebaute Aktorelemente die Vorspannung und wirken so der Wärmeentwicklung entgegen und vermindern Schwingungen.
Weiterhin dämpfen keramische Elemente im Trieb bei hoher dynamischer Belastung die Stöße und tragen damit zur Positioniergenauigkeit bei.
Rollengewindetriebe
Eine Weiterentwicklung der Kugelgewindetriebe sind sogenannte Rollengewindetriebe, die als Rollengewindetriebe mit Rollenrückführung oder als Planetenrollengewindetriebe ausgeführt sein können.
Kugel- oder Rollengewindetriebe ihrerseits wiederum sind Komponenten sogenannter Aktoren, die in der Antriebstechnik weit verbreitet sind.
Siehe auch
Hersteller von Kugelgewindetrieben
- Hiwin GmbH, 77654 Offenburg
- A. Berger GmbH & Co. Präzisions-Maschinenbauteile KG
- Bosch Rexroth AG
- Danaher Corporation
- Eichenberger Gewinde AG, Grenzstrasse 30, CH-5736 Burg, Switzerland
- Hydrel GmbH, Badstrasse 14, CH-8590 Romanshorn, Switzerland
- MPS Micro Precision Systems AG, Langfeldstrasse 95, CH-2500 Biel/Bienne 8, Switzerland
- NSK Ltd.
- RACO Elektro-Maschinen GmbH, Jesinghauser Str. 56-64, D-58332 Schwelm, Germany
- Svenska Kullagerfabriken (SKF)
- THK
- Schaeffler Group (LUK,INA,FAG)
- Steinmeyer (A. Steinmeyer GmbH&Co.KG)
Weblinks
Wikimedia Foundation.