- Computerassistierte Chirurgie
-
Computerassistierte Chirurgie (englisch computer assisted surgery, CAS), auch bekannt als computer aided surgery repräsentiert ein chirurgisches Konzept und eine Reihe von Methoden, bei denen Computer-Technologie zur Operationsplanung und zum Leiten oder für die Ausführung chirurgischer Eingriffe genutzt wird. CAS ist auch als computergestützte Chirurgie, computergestützte Intervention, Bild geführte Chirurgie und chirurgische Navigation, bekannt. CAS ist ein wichtiger Faktor bei der Entwicklung der Roboter-Chirurgie.
Inhaltsverzeichnis
Grundlagen
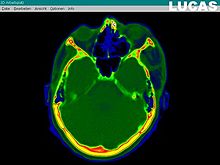 Darstellung des Bildes (Segmentierung) an der Arbeitsstation LUCAS
Darstellung des Bildes (Segmentierung) an der Arbeitsstation LUCAS
Erstellen eines Bildes des Patienten
Wichtigster Bestandteil von CAS ist die Entwicklung eines präzisen Modells des Patienten. Dies kann durch eine Reihe von bildgebenden Verfahren wie Computertomographie, Magnetresonanztomographie, Röntgenstrahlen, Ultraschall geschehen. Für die Erzeugung dieses Modells der zu operierenden anatomischen Region müssen die Bilder gescannt und in das Computersystem hochgeladen werden. Es ist möglich, eine Reihe von Scan-Methoden zu verwenden, bei denen die Datensätze durch Techniken der Datenfusion zusammengeführt werden. Das letztendliche Ziel ist die Schaffung eines 3D-Datasets, der die exakte geometrische Lage der normalen und krankhaft veränderten Gewebe und Strukturen der Zielregion wiedergibt. Von der verfügbaren Scan-Methoden wird Computertomographie bevorzugt, weil MRT-Datasets für volumetrische Verformungen, die zu Ungenauigkeiten führen können, bekannt sind.
Ein Datensatz kann zum Beispiel die Zusammenstellung der Daten von 180 CT-Schichten enthalten, in 1 mm Abstand mit jeweils 512 × 512 Pixel. Der Kontrast innerhalb des 3D-Datasets (mit seinen Millionen von Pixel) liefert die Details sowohl der weichen als auch der festen Gewebestrukturen und ermöglicht so einem Computer zu differenzieren und die unterschiedlichen Gewebe und Strukturen eines Menschen optisch getrennt darzustellen. In die von einem Patienten erfassten Bilddaten werden oft absichtlich Orientierungspunkte (Marker) gesetzt, um in der Lage zu sein, zu einem späteren Zeitpunkt den virtuellen Datensatz neu auszurichten und mit der Situation während der Operation abzugleichen (Patientenregistrierung).
Bildanalyse und -verarbeitung
Bildanalyse schließt die Bearbeitung des 3D-Modell des Patienten ein, um die relevanten Informationen zu extrahieren. Durch die unterschiedlichen Kontraststufen der verschiedenen Gewebe kann zum Beispiel ein Modell so geändert werden, dass nur feste Strukturen wie Knochen gezeigt werden, oder aber der Verlauf der Arterien und Venen durch das Gehirn sichtbar ist.
Diagnose, präoperative Planung, Simulation des Eingriffs
Durch Verwenden spezieller Software, wie OsiriX, kann der gesammelte Datensatz des Patienten virtuelles 3D-Modell wiedergegeben werden. Dieses Modell kann leicht bearbeitet werden, um dem Chirurgen Ansichten aus jedem möglichen Blickwinkel und jeder Tiefe zu liefern. So kann der Chirurg den Fall besser beurteilen und eine genauere Diagnose stellen. Darüber hinaus wird die chirurgische Intervention geplant und virtuell simuliert, bevor die eigentliche Operation stattfindet. Bei Verwenden spezieller Software, wird der chirurgische Roboter programmiert, die vorab geplante Aktionen während des aktuellen chirurgischen Eingriffs durchzuführen.
Bei CAS ist der eigentliche Eingriff als chirurgische Navigation definiert. Diese besteht aus dem Zusammenspiel der Aktionen des Chirurgen und des chirurgischen Roboters (welcher während der präoperativen Planung programmiert wurde, bestimmte Aktionen auszuführen. Ein chirurgischer Roboter ist ein mechanisches Gerät (in der Regel wie ein Roboterarm), welcher vom Computer gesteuert wird. Roboter-Chirurgie kann in drei Typen eingeteilt werden, je nach dem Grad der Interaktion des Chirurgen während des Eingriffs: direkt beaufsichtigte, telechirurgische und Shared-gesteuerte.
Bei einem Aufsichts-gesteuerten System, wird die Operation ausschließlich vom Roboter ausgeführt, welcher vorprogrammierte Befehle umsetzt. Bei Telechirurgie, auch als ferngesteuerte Chirurgie bekannt, programmiert der Chirurg während der Prozedur die Roboterarme direkt, statt zuzulassen, dass die Roboterarme nach einem vorgegebenen Programm arbeiten. Bei Shared-Steuerung führt der Chirurg das Verfahren mittels des Roboters durch, indem er ihn direkt über die stationäre Handsteuerung lenkt. Bei den meisten Robotern kann der Arbeitsmodus für jede einzelne Maßnahme in Abhängigkeit von der chirurgischen Komplexität und den Besonderheiten des Falles gewählt werden.
Praktische Anwendungen
Computerunterstützte Chirurgie ist der Beginn einer Revolution in der Chirurgie. Es macht schon einen großen Unterschied in Hochpräzisionsbereichen der Chirurgie, wird aber auch bei chirurgischen Standardeingriffen verwendet.
Computerassistierte Neurochirurgie
Remote Manipulatoren wurden zum ersten Mal in der Neurochirurgie in den 1980er Jahren genutzt. Dies erlaubt eine Weiterentwicklung der Gehirn- Mikrochirurgie (10-fache Kompensation des physiologischen Tremor des Chirurgen), erhöhte Akkuratesse und Präzision des Eingriffs. Darüber hinaus wurde dadurch ein neues Tor zur minimal-invasiven Gehirnchirurgie eröffnet, ferner das Risiko postoperativer Morbidität durch versehentlich beschädige angrenzenden Zentren reduziert.
Computerassistierte Mund-, Kiefer- und Gesichtschirurgie
Knochensegmentnavigation ist das moderne chirurgische Konzept in der Kieferchirurgie (Korrektur der Anomalien von Kiefer und Schädel), bei Operationen des Kiefergelenkes oder bei der Rekonstruktion des Gesichts[1].
Computerassistierte HNO-Chirurgie
Roboter-Chirurgie erfüllt hier die meisten chirurgischen Erfordernisse bei Gebieten mit eingeschränktem chirurgischen Zugang und der Notwendigkeit hochpräzisen Handelns wie zum Beispiel bei der Mittelohr-Chirurgie[2].
Computerassistierte orthopädische Chirurgie (CAOS)
Die Anwendung der Roboter-Chirurgie ist in der Orthopädie weit verbreitet, vor allem bei Routineeingriffen, wie Hüftgelenksersatz[3], Kniegelenkersatz[4]. Sie ist ebenso nützlich bei der Operationsplanung und -führung, um die korrekte anatomische Lage verschobener Knochenfragmente bei Frakturen auszumachen, was dann die Fixierung mittels Osteosynthese besser ermöglicht.
Computerassistierte Viszeralchirurgie
Mit der Einführung der Computer-assistierten Chirurgie sind in der allgemeinen Chirurgie große Fortschritte gemacht worden in Richtung minimal invasiver Ansätze. Die Laparoskopie in der Bauch- und gynäkologischen Chirurgie ist eine der Nutznießer dieses Fortschritts, ermöglicht er doch, dass chirurgische Roboter Routine-Operationen durchführen, wie die Hysterektomie (Gebärmutterentfernung). In der Herzchirurgie können gemeinsame Steuerungssysteme den Mitralklappenersatz oder die Ventrikularstimulation durch kleine Thorakotomien durchführen und in der Urologie tragen chirurgische Roboter zu laparoskopischen Ansätzen bei Pyeloplastik (Nierenbeckenplastik) oder Nephrektomie (operative Entfernung einer Niere) oder Eingriffen an der Prostata[5][6] bei.
Computerassistierte Radiochirurgie
Auch Radiochirurgie (eine Form der Strahlentherapie) erfolgt unter Einbeziehung fortschrittlicher Robotersysteme, so wie Cyberknife, bei dem ein robotergestützten Linearbeschleuniger auf einem Industrieroboter montiert ist. Dabei erfolgt die Führung in Richtung des Tumors unter Nutzung der Skelettstrukturen als Bezugsrahmen (stereotaktisches Radiochirurgiesystem). Während des Verfahrens wird Röntgenstrahlung verwendet, um das Gerät vor Abgabe der Strahlenbündel akkurat zu positionieren.
Vorzüge der computerassistierten Chirurgie
CAS beginnt mit der Prämisse einer viel besseren Visualisierung des Operationsfeldes, durch eine genaue präoperative Diagnostik und eine klar definierte chirurgische Planung mit Hilfe von Operationsplanung in einer präoperativen virtuellen Realität. Auf diese Weise kann der Operateur leicht die meisten chirurgischen Schwierigkeiten und Operationsrisiken bewerten und hat eine klare Vorstellung vom optimalen chirurgischen Vorgehen. Während der Operation verbessert die Orientierung am Computer die geometrische Präzision der chirurgischen Schritte und reduziert auch die Redundanz der Handgriffe des Chirurgen. Es verbessert deutlich die Ergonomie im Operationssaal, verringert das Risiko von chirurgischen Fehlern und reduziert die Operationszeit.
Bemerkenswerte Systeme der computerassistierten Chirurgie
Von 1989 bis 2007 wurden mehr als 200 CAS-Systeme von verschiedenen Universitäten und Forschungsinstituten entwickelt, praktisch noch experimentelle Geräte. Gegenwärtige handelsübliche Systeme mit Zulassung für eine klinische Anwendung sind hauptsächlich StealthStation (Medtronic, USA), EnLite (ein transportables System der Stryker Corporation[7]) und NavSuite (Stryker Corporation), VectorVision (Brainlab, Deutschland), DigiPointeur (Dr. Lombard / Ste COLLIN, Frankreich). Alle außer DigiPointeur und StealthStation nutzen ein optisches IR-Tracking-System. DigiPointeur ist ein elektromagnetisches Tracking-System, und StealthStation nutzt ein elektromagnetisches (PoleStar) oder optisches IR-Tracking-System. Die StealthStation stellt sowohl optische als auch elektromagnetische Tracking-Systeme.
Der erste chirurgische Roboter hieß Äsop (Computer Motion, USA); Aesop 1000 erhielt 1993 in den USA die behördliche Zulassung der Food and Drug Administration (FDA). Es gab mehrfach Verbesserungen und Varianten, wie Zeus oder Hermes.
Das chirurgische System Da Vinci wurde von Intuitive Surgical, einem Zweig des Stanford Forschungsinsituts (USA), entwickelt. Da Vinci war der erste Remote manipulator, der dann von FDA im Jahr 2000 die Berechtigung für selbstständige (stand-alone) OP- Durchführungen bekam. Da Vinci ist ein telechirurgisches System, meist verwendet bei laparoskopischen Bauch-OPs. Im Jahr 1997 hatte es die Zulassung von der FDA erhalten und war 2000 der erste Remote Manipulator, der die FDA-Zulassung bekam, Stand-alone-Operation durchzuführen. Es ist ein telechirurgisches System, meist für die laparoskopische Bauchchirurgie eingesetzt. Nach heftigen Auseinandersetzungen fusionierten schließlich die beiden Hersteller, noch unter der Marke von Intuitive Surgical.
OrthoDoc und Robodoc sind Roboter, entwickelt von Integrated Surgical Systems für die Assistenz in der orthopädischen Chirurgie. Dieselbe Firma hat Neuronate produziert, nutzbar in Verbindung mit OrthoDoc / Robodoc in der Neurochirurgie.
CyberKnife (Accuray Incorporated) ist ein Roboter mit integriertem Linearbeschleuniger, der seit 2001 in der Radiochirurgie verwendet wird[8].Ethische Probleme
Neue und weiterentwickelte technologische Verfahren im medizinisch-chirurgischen Bereich, ferner experimentelle Geräte könnte zu neuen und unvorhergesehenen Risiken für den Patienten und / oder das OP-Team führen. Ethikkommissionen der medizinischen Einrichtungen müssen die ethischen Probleme für jedes neu entwickelte Gerät oder für jedes Verfahren analysieren. Ferner könnten die hohen Kosten für die anfängliche Entwicklung solcher Verfahren, die meist von großen Krankenhäusern abgedeckt werden können, ein Anlass für Fragen nach gleichberechtigtem Zugang zu medizinischer Versorgung für die Patienten sein.
Einzelnachweise
- ↑ Marmulla R, Niederdellmann H: Computer-assisted bone segment navigation. J Cranio-Maxillofac Surg 26:347-359, 1998 (en)
- ↑ Berlinger NT:Robotic Surgery - Squeezing into Tight Places. New England Journal of Medicine 354:2099-2101, 2006 (en)
- ↑ Operieren mit 3D- Navigation auf der Seite des WDR, abgerufen am 2. Mai 2011
- ↑ navigierter Kniegelenkersatzauf der Seite der Kniesprechstunde der Orthopädie des Klinikums Dortmund, abgerufen am 2. Mai 2011
- ↑ Muntener M, Ursu D, Patriciu A, Petrisor D, Stoianovici D: Robotic prostate surgery. Expert Rev Med Devices 3(5):575-84 (en)
- ↑ Guillonneau, Bertrand: What Robotics in Urology? A Current Point of View. European Urology. 43: 103-105 2003 (en)
- ↑ eNlite Navigation System der Stryker Corporation/USA, abgerufen am 18. September 2011
- ↑ Cyberknife im OP abgerufen am 3. Mai 2011

Wikimedia Foundation.