- Direct Digital Control (Regelungstechnisches Verfahren)
-
Direct Digital Control (abgekürzt DDC) ist ein Verfahren, Regelkreise mit darin teilweise enthaltenen Übertragungsgliedern von digitalen Prozessorsystemen (inklusive AD- und DA-Wandler-modellierende Glieder) zu konstruieren und ihre Eigenschaften zu berechnen.
Zentral ist dabei die Vorstellung, dass ein digitaler Regler sich als lineares Abtastsystem beschreiben lässt: Regelgröße und Sollgröße werden in festen, gleichmäßigen Zeitabständen abgetastet und in digitale Zahlenwerte umgewandelt, also quantisiert. Der Regler berechnet aus diesen quantisierten Größen in jedem Zeitschritt die Stellgröße, die zum Abtastzeitpunkt ausgegeben und in ein Analogsignal umgewandelt wird. Ein Halteglied sichert, dass der Stellwert während des gesamten Zeitintervalls bis zum nächsten Abtastschritt anliegt. (Die Quantisierung der Größen führt außerdem zu einem wertdiskreten Signal. In der Regel wird die Quantisierung jedoch so fein gewählt, dass deren Auswirkungen auf die Dynamik des Regelkreises vernachlässigt werden können.)
Durch diese besondere Art der Modellbildung lässt sich an einer Stelle des Blockschaltbildes eines derart beschriebenen Regelkreises ein bestimmter Block eingrenzen beziehungsweise festlegen, der die Implementierung eines Regelalgorithmus beinhaltet, welcher weitgehend beliebig vorgegeben und an die Regelkreisbedürfnisse angepasst werden kann. Ein solcher Block bildet (im übertragenen Sinne) das Herzstück eines jeden DDC-Reglers; seine Existenz legt nahe, dass dieser durch ein Stück Software in einem Prozessorsystem realisiert wird. Dies hat bei seinem Aufkommen dem Verfahren dann auch den Namen gegeben: Als Anfang bis Mitte der 1960er Jahre von digitalen Mikrorechnern (genauer gesagt: Prozessrechnern) aus erstmals „direkt“ auf die strukturelle Gestaltung von Regelkreisen Einfluss genommen werden konnte, war dies eine völlig neue Erfahrung gegenüber dem, was man aus der Ära der Dominanz der Analogtechnik bezüglich der Möglichkeiten im Umgang mit Rechnern kannte, da man mit der zu dieser Zeit neuen digitalen Technik bis zum Einsetzen dieser Entwicklungsphase etwas Derartiges im industriellen Bereich noch nicht bewerkstelligt hatte. So hat man dieses Verfahren dann „Direct Digital Control“ / „Direkte digitale Regelung“ genannt. Mit der Analogtechnik konnte man zwar bis dato auch Reglerparameter ändern, doch die Struktur der Regelkreisglieder blieb stets an die verbauten Analogrechnerkomponenten gebunden, während beim Direct Digital Control über die Abänderung des Regelalgorithmus nunmehr auch die Struktur der Regelkreisglieder geändert werden konnte, nicht nur die Parameter.
Inhaltsverzeichnis
Grundlegendes
Die Modellvorstellung des Direct-Digital-Control-Regelungsverfahrens geht davon aus, dass das Istwert-Signal, welches dem (zu entwerfenden) Regler zugeführt wird, ein Signal ist, das durch Zeitdiskretisierung des Signalverlaufs entlang der Zeitachse gewonnen wird. Man denkt dabei daran, dass ein Regler (siehe Blockschaltbild) konkret durch einen Signalprozessor oder einen Mikrocontroller hardwaremäßig realisiert wird, wobei das Istwert-Signal des Regelkreises – von der Regelstrecke kommend – durch einen Analog-Digital-Wandler hindurchgeschickt, dabei in äquidistanten Schritten zerhackt und mit einem punktförmigen Abgriff der Werte abgetastet wird, bevor es der Prozessoreinheit zugeführt wird. Bei Verarbeitung eines solchen Signals durch einen Analog-Digital-Wandler wird das Signal aber nicht nur über die Zeitachse abgetastet, sondern auch dessen Amplitude quantisiert. So entsteht dann in guter Näherung vom Istwert-Signal eine wertdiskrete Zahlenfolge
 über die Zeit t, deren Amplitudenwerte sich nur zu den Zeiten
über die Zeit t, deren Amplitudenwerte sich nur zu den Zeiten  mit k=0,1,2,3… ändern, wobei T die Abtastperiode darstellt. (Anders als in der Mathematik wird in der Regelungstechnik eine Zahlenfolge in runden Klammern geschrieben statt in geschweiften; aus Gründen der Übersichtlichkeit sind hier geschweifte Klammern den Funktionaltransformationen, hier insbesondere der
mit k=0,1,2,3… ändern, wobei T die Abtastperiode darstellt. (Anders als in der Mathematik wird in der Regelungstechnik eine Zahlenfolge in runden Klammern geschrieben statt in geschweiften; aus Gründen der Übersichtlichkeit sind hier geschweifte Klammern den Funktionaltransformationen, hier insbesondere der  -Transformation, vorbehalten.) Mathematisch allgemein schreibt man also für aus Abtastung erhaltene Zahlenfolgen
-Transformation, vorbehalten.) Mathematisch allgemein schreibt man also für aus Abtastung erhaltene Zahlenfolgen mit k=0,1,2,3....
mit k=0,1,2,3....Mit dieser Beschaffenheit des Istwert-Signals kann man nun Signalprozessor- oder Mikrocontroller-intern einen zeitdiskreten Sollwert-Istwert-Vergleich durchführen - dieser liefert
 mit
mit  als Führungsgrößenvariable – und die Regelgröße entsprechend den eigenen Wunschvorstellungen und Vorgaben ausregeln. Natürlich können auch mehrere Regelgrößen gleichzeitig geregelt werden. (Der Grundgedanke dieses Konzepts sollte jedoch zunächst möglich einfach erklärt werden, weswegen hier zunächst nur die Regelung einer einzigen Regelgröße erläutert werden soll.)
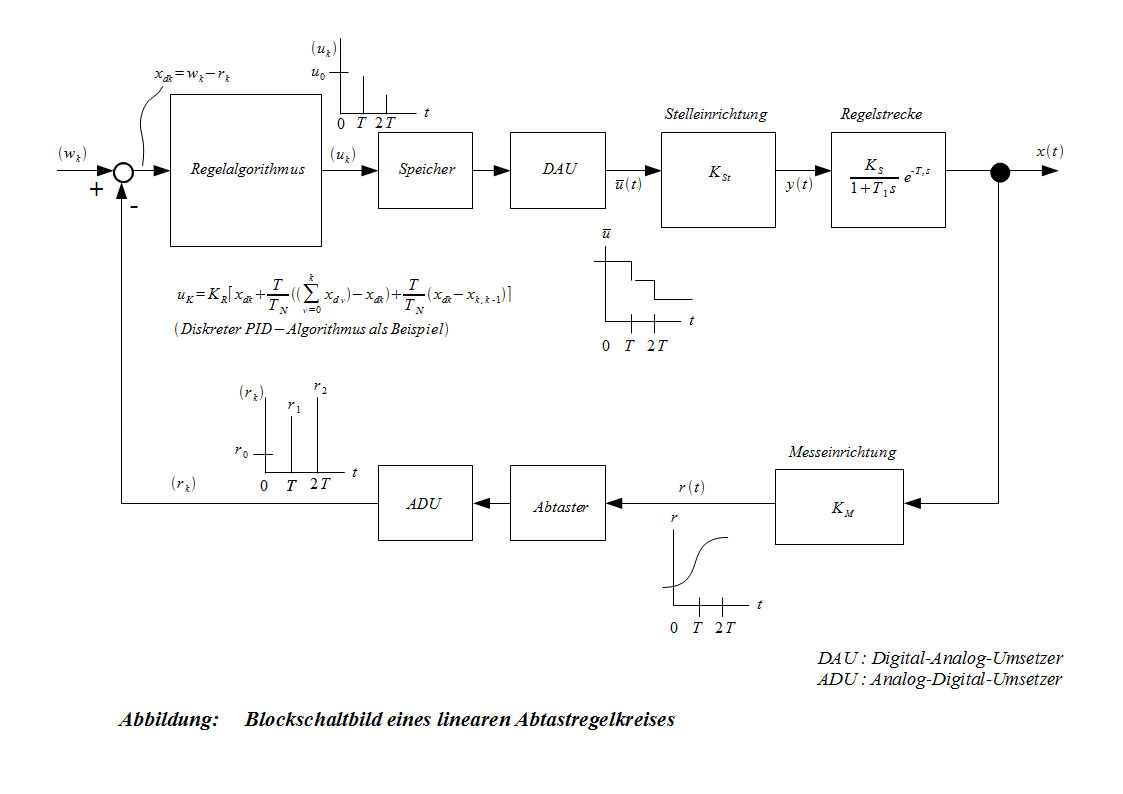
als Führungsgrößenvariable – und die Regelgröße entsprechend den eigenen Wunschvorstellungen und Vorgaben ausregeln. Natürlich können auch mehrere Regelgrößen gleichzeitig geregelt werden. (Der Grundgedanke dieses Konzepts sollte jedoch zunächst möglich einfach erklärt werden, weswegen hier zunächst nur die Regelung einer einzigen Regelgröße erläutert werden soll.)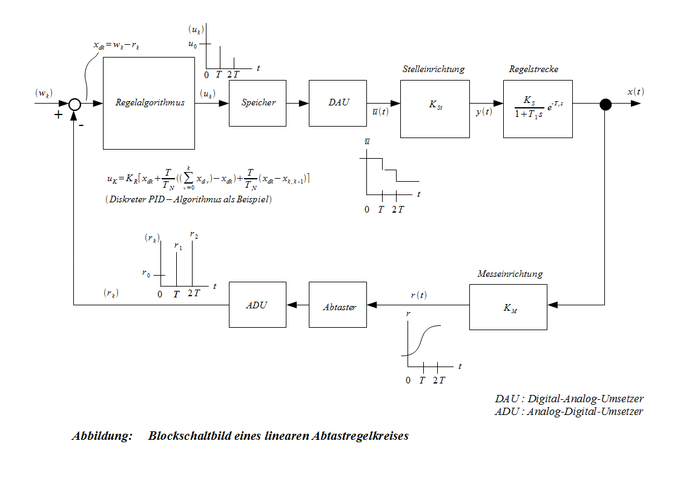 konventioneller linearer Abtastregelkreis: Dieser liefert ein Basiskonzept für das regelungstechnische Verfahren des "Direct Digital Control"
konventioneller linearer Abtastregelkreis: Dieser liefert ein Basiskonzept für das regelungstechnische Verfahren des "Direct Digital Control"
Die zeitdiskrete Soll-Ist-Wert-Differenz
 wird nun dem Regler-Block zugeführt, welcher von einem Signalprozessor oder Mikrocontroller verkörpert wird, in welchem ein Regelglied-Algorithmus (beispielsweise ein PID-Glied-Algorithmus oder dergleichen mehr) zeitdiskret implementiert sein möge, mit dem die Ausregelung der Regelgröße erfolgt. Die Wahl eines Proportional-Integral-Differenzial-Gliedes als Regler ist hier keineswegs zwingend; sie ist hier nur exemplarisch getroffen worden, weil PID-Glieder in der Praxis relativ universell einsetzbar sind.
wird nun dem Regler-Block zugeführt, welcher von einem Signalprozessor oder Mikrocontroller verkörpert wird, in welchem ein Regelglied-Algorithmus (beispielsweise ein PID-Glied-Algorithmus oder dergleichen mehr) zeitdiskret implementiert sein möge, mit dem die Ausregelung der Regelgröße erfolgt. Die Wahl eines Proportional-Integral-Differenzial-Gliedes als Regler ist hier keineswegs zwingend; sie ist hier nur exemplarisch getroffen worden, weil PID-Glieder in der Praxis relativ universell einsetzbar sind.Um den PID-Regler mit einer wertdiskreten Zahlenfolge charakterisieren zu können, bildet man das zeitdiskrete Analogon zum zeitkontinuierlichen PID-Regler. Dieser wird durch folgende Gleichung beschrieben:
![\mathcal {}u(t) = K_R [x_d (t) + \frac{1}{T_N}\int_0^t x_d (\tau)d\tau + T_V{\dot x}_d (t)]](c/8ece0ade2cfae929e89be16fc8fc93cc.png) ,
,wobei
 den Übertragungsbeiwert des Reglers,
den Übertragungsbeiwert des Reglers, die Nachstellzeit und
die Nachstellzeit und die Vorhaltezeit repräsentieren.
die Vorhaltezeit repräsentieren.Zur Bildung der zeitdiskreten Entsprechung ersetzt man die kontinuierlichen Funktionen
 und
und  durch die Zahlenfolgen
durch die Zahlenfolgen  und
und  . Für das Integral
. Für das Integral
nimmt man die Summe
 ,
,
welche die durch das Integral dargestellte Fläche unter der Funktionskurve approximiert. Schließlich ersetzt man den Differenzialquozienten  durch den Differenzenquozienten
durch den Differenzenquozienten
 .
.
So erhält man zunächst für den zeitdiskreten PID-Algorithmus![\mathcal {}u(kT) = {}K_R x_d (kT) + {}K_R \frac{T}{T_N} \sum_{\nu =0}^{k-1} x_d (\nu T) + {}K_R \frac{T_V}{T} [x_d (kT) - x_d ((k-1)T)]](b/c5b3cec09dd9a0db1625b63f272d75f1.png) .
.Dieser lässt sich auch schreiben als
![\mathcal {}u_k = {}K_R [ x_{dk} + \frac{T}{T_N} \sum_{\nu =0}^{k-1} x_{d\nu} + T_V \frac{x_{dk} - x_{d,k-1}}{T}]](3/763e80f0b41ed6cbec138d9409240d8a.png) .
.Den Summationsindex der Reihe in dieser Gleichung kann man dann noch bis k führen, indem man das letzte Reihenglied der verlängerten Reihe dann außerhalb der Reihe subtrahiert, sodass sich beide Operationen aufheben:
![\mathcal {}u_k = {}K_R [ x_{dk} + \frac{T}{T_N} ((\sum_{\nu =0}^k x_{d\nu}) - x_{dk}) + \frac{T_V}{T} (x_{dk} - x_{d,k-1})]](d/e4dec416800377410c34f96833dadcc6.png) .
.
Dies ist der gewonnene zeitdiskrete PID-Algorithmus.Den numerischen Wert, den der Regelglied-Algorithmus liefert, der nach jeder Abtastperiode genau einmal abgerufen werden muss, muss für die Dauer der Abtastperiode jeweils gespeichert und „gehalten“ werden (→ Formung der wertdiskreten Zahlenfolge in eine sogenannte „Treppenfunktion“), um von dort durch einen Digital-Analog-Wandler hindurchgeschickt zu werden, um die in Zeitabständen anliegenden numerischen Werte in Form eines (hinter dem DA-Wandler) sodann kontinuierlichen Signals auf die Stelleinrichtung draufgeben zu können. Diese Stelleinrichtung wirkt auf die Regelstrecke ein, von der wiederum kontinuierlich ein Meßwert abgegriffen wird, der wiederum dem ganz oben erwähnten Analog-Digital-Wandler zugeführt wird, wodurch ein geschlossener Regelkreis zustande kommt.
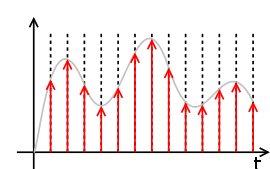 Eine δ-Impulsfolge: Das Rechnen mit δ-Impulsfolgen erweist sich als ergänzende sinnvolle Beschreibung von impulsförmigen Signalen, ergänzend zu zeitdiskreten Zahlenfolgen (welche eigentlich nur mathematische Objekte darstellen), im Zeitbereich.
Eine δ-Impulsfolge: Das Rechnen mit δ-Impulsfolgen erweist sich als ergänzende sinnvolle Beschreibung von impulsförmigen Signalen, ergänzend zu zeitdiskreten Zahlenfolgen (welche eigentlich nur mathematische Objekte darstellen), im Zeitbereich.Um die Regelkreisentwurfs-Berechnung möglichst einfach zu halten, gibt man die ergänzende Bedingung vor, dass die regelungstechnischen Blöcke von Blockdiagrammen wie auch δ-Impulsfolgen mathematisch linear sein mögen. (Durchaus lässt sich zeigen, dass eine Folge von δ-Funktionalen die Linearitätsbedingung erfüllt.)[1] Auf diese Weise erhält man mit einer derartigen Modellbildung tatsächlich ein lineares Abtastsystem.
Praktische Aspekte
Anhand des Gesagten wird klar, dass im Vergleich zu analogen Regelungen für DDC-Regler über längere Zeiträume die gleiche Hardware verwendet werden kann, während lediglich der Regelungs-Algorithmus sowie externe Steuerbefehle für Sensoren und Aktoren (das heißt die Regler-Software insgesamt) immer wieder neu den jeweiligen regelungstechnischen Problemen angepasst werden muss. Dies stellt einen enormen Flexibilitätsgewinn gegenüber der Analogtechnik dar. Lediglich in mehrjährigen Zeitintervallen sollte dann auch die Hardware ausgetauscht werden, wobei dies stets von den Anforderungen der konkreten Anwendungen abhängt.
Einzelnachweise
- ↑ Dies ist eine Konsequenz, die sich aus den Eigenschaften der „Distributionen“ ergibt, deren mathematisches Fundament durch den französischen Mathematiker Laurent Schwartz eine solide Grundlage erfahren hat.
Literatur
- Otto Föllinger: Lineare Abtastsysteme. 5. durchges. Aufl., Oldenbourg Verlag, München 1993, ISBN 3-486-22725-4
- James B. Knowles: Direct Digital Control Systems. Research Studies Press, Taunton 1994, ISBN 0-86380-167-6
Siehe auch
 Portal:Mess-, Steuerungs- und Regelungstechnik – Übersicht zu Wikipedia-Inhalten zum Thema Mess-, Steuerungs- und Regelungstechnik
Portal:Mess-, Steuerungs- und Regelungstechnik – Übersicht zu Wikipedia-Inhalten zum Thema Mess-, Steuerungs- und RegelungstechnikAbtastung (Signalverarbeitung), Regler, Regelungstechnik, Digitalsignal, Analog-Digital-Umsetzer, Digital-Analog-Umsetzer, Sollwert, Regelgröße, IST-Wert, Quantisierung, Diskretisierung, Regelstrecke, Stellglied, Z-Transformation

Wikimedia Foundation.