- Deskriptor-System
-
In einer differential-algebraischen Gleichung (auch Algebro-Differentialgleichung oder Deskriptor-System) sind gewöhnliche Differentialgleichungen und algebraische (d. h. hier: ableitungsfreie) Nebenbedingungen gekoppelt und werden als eine Gleichung bzw. Gleichungssystem aufgefasst. In einigen Fällen ist diese Struktur schon in der Form des Gleichungssystems angelegt, z. B. in
Diese Form ergibt sich regelmäßig bei Problemen aus der Mechanik von Körpern unter Zwangsbedingungen, als instruktives Beispiel wird oft das Pendel gewählt.
Die allgemeinste Form einer differentiell-algebraischen Gleichung ist eine implizite Differentialgleichung in der Form
 ,
, 
für eine vektorwertige Funktion
 mit
mit  . Eine Gleichung in dieser impliziten Form ist (lokal) nach
. Eine Gleichung in dieser impliziten Form ist (lokal) nach  auflösbar, wenn die partielle Ableitung
auflösbar, wenn die partielle Ableitung  regulär ist. Dies folgt aus dem klassischen Satz über implizite Funktionen. In diesem speziellen Fall kann man die implizite Gleichung umschreiben in die Form
regulär ist. Dies folgt aus dem klassischen Satz über implizite Funktionen. In diesem speziellen Fall kann man die implizite Gleichung umschreiben in die Formund hat damit wieder eine explizite gewöhnliche Differential-Gleichung.
Eine echte differentiell-algebraische Gleichung liegt dann vor, wenn die partielle Ableitung
singulär ist. Dann zerfällt die implizite Differentialgleichung lokal in eine inhärente Differentialgleichung und eine algebraische Nebenbedingung. Dies entspricht praktisch einer Differentialgleichung, die auf einer Mannigfaltigkeit betrachtet wird. Das praktische Problem bei der impliziten Differentialgleichung ist jedoch, dass diese Mannigfaltigkeit zunächst nicht explizit bekannt ist.Im Gegensatz zu gewöhnlichen Differentialgleichungen, deren Lösung durch Integration bestimmt wird, ergeben sich Teile der Lösung einer differentiell-algebraischen Gleichung durch Differentiation. Dies stellt weitere Anforderungen an die Systemfunktion F. Muss diese bei gewöhnlichen Differentialgleichungen nur stetig bzw. stetig differenzierbar sein, um die Lösbarkeit zu garantieren, so werden nun auch höhere Ableitungen für die Lösung benötigt. Die genaue Ordnung der benötigten Ableitungen hängt vom gewählten Lösungsansatz ab und wird allgemein als Index der differentiell-algebraischen Gleichung bezeichnet.
Durch die im Lösungsprozess hinzuzuziehenden Ableitungen von Komponenten des Gleichungssystems entsteht ein überbestimmtes System. Eine Folge davon ist, dass die Lösungen auch noch einer Anzahl expliziter oder impliziter algebraischer Nebenbedingungen genügen müssen. Insbesondere gilt dies für Anfangswerte von Anfangswertproblemen. Die Suche nach konsistenten Anfangswerten, z. B. in der Nähe vorgegebener inkonsistenter Anfangswerte, ist ein nichttriviales erstes Problem bei der praktischen Lösung von differentiell-algebraischen Gleichungen.
Inhaltsverzeichnis
Typen differentiell-algebraischer Gleichungen
Semi-explizite differentiell-algebraische Gleichung
Ein spezieller Fall für eine differentiell-algebraische Gleichung ist ein System in der Form
Durch Differenzieren der zweiten Differentialgleichung und Einsetzen der ersten erhält man als weitere Bedingung an eine Lösung
Ist der Faktor vor
 von Null verschieden, so ergibt sich ein explizites System gewöhnlicher Differentialgleichungen. Anfangswerte für dieses System müssen aber auch die undifferenzierte zweite Gleichung erfüllen, so dass nur ein Parameter frei gewählt werden kann.
von Null verschieden, so ergibt sich ein explizites System gewöhnlicher Differentialgleichungen. Anfangswerte für dieses System müssen aber auch die undifferenzierte zweite Gleichung erfüllen, so dass nur ein Parameter frei gewählt werden kann.Lineare differentiell-algebraische Gleichung
Sehr häufig treten differentiell-algebraische Gleichungen auf in der Form
mit stetigen Matrix-Koeffizienten
und einer Funktion
Eine echte differentiell-algebraische Gleichung liegt hier dann vor, wenn die Matrix-Funktion E auf I einen nichttrivialen Kern hat. Ein besonders einfacher Fall tritt ein, wenn die Matrizen quadratisch mit konstanten Einträgen sind.
Lineare differentiell-algebraische Gleichung mit proper formuliertem Hauptterm
Eine andere Schreibweise für lineare differentiell-algebraische Gleichungen[1][2] ist die Form
mit (wenigstens) stetigen Matrix-Koeffizienten
und einer Funktion
In dieser Schreibweise wird der Tatsache Rechnung getragen, dass bei einer differentiell-algebraischen Gleichung nur ein Teil des Variablenvektors x differenziert wird. Tatsächlich wird hier nur die Komponente Bx differenziert und nicht der gesamte Variablenvektor x. Als klassische Lösungen dieser Gleichung werden Funktionen aus dem Raum
betrachtet, also dem Raum der stetigen Funktionen x, für die die Komponente Bx stetig differenzierbar ist.
Die beiden Matrix-Funktionen A und B bilden den Hauptterm der Gleichung und dieser heißt proper formuliert, wenn zwei Eigenschaften erfüllt sind:
1. Es gilt
 .
.
2. Es existiert eine stetig differenzierbare Projektor-Funktion
mit der Eigenschaft
 .
.
Hier stellt die erste Bedingung sicher, dass zwischen den beiden Matrix-Funktionen A und B „nichts verloren geht“. Im Kern der Matrix A kann nichts aus dem Bild der Matrix B verschwinden. Die Projektor-Funktion R realisiert genau die durch die Matrix-Funktionen A und B gegebene Zerlegung des Raumes
 und ist für die Analyse der Gleichung hilfreich.
und ist für die Analyse der Gleichung hilfreich.Ein einfacher Spezialfall für einen proper formulierten Hauptterm ist gegeben durch Matrix-Funktionen A und B mit der Eigenschaft
 .
.
Für die Projektor-Funktion R kann dann die Einheitsmatrix gewählt werden.
Indexbegriffe für DAEs
Differentiationsindex
Oftmals kann die Lösung eines Algebro-Differentialgleichungssystems durch (spezielle) Lösungskurven eines gewöhnlichen Differentialgleichungssystems dargestellt werden, obwohl
 singulär ist. Eine Schlüsselrolle nimmt hierbei der Differentiationsindex des Algebro-Differentialgleichungssystems ein.
singulär ist. Eine Schlüsselrolle nimmt hierbei der Differentiationsindex des Algebro-Differentialgleichungssystems ein.Numerische Verfahren zur Lösung von Algebro-Differentialgleichungssystemen können meist nur Systeme integrieren, deren Differentiationsindex einen gewissen Maximalwert nicht überschreitet. So darf der Differentiationsindex des Systems beim impliziten Euler-Verfahren zum Beispiel nicht größer als eins sein.
Der Differentiationsindex eines Algebro-Differentialgleichungssystems
ist die Anzahl
 der Zeitableitungen, die notwendig sind, um aus dem entstehenden Gleichungssystem
der Zeitableitungen, die notwendig sind, um aus dem entstehenden Gleichungssystemdurch algebraische Umformungen ein gewöhnliches Differentialgleichungssystem
extrahieren zu können.
Beispiele
Ein Algebro-Differentialgleichungssystem mit regulärer Matrix
 , das also algebraisch nach umgestellt werden kann, hat den Differentiationsindex null.
, das also algebraisch nach umgestellt werden kann, hat den Differentiationsindex null.Eine rein algebraische Gleichung
- F(x,t) = 0
mit regulärer Jacobi-Matrix Fx(x,t), die als Algebro-Differentialgleichung mit
 interpretiert wird, hat Differentiationsindex eins: Nach einmaligem Differenzieren erhält man die Gleichung
interpretiert wird, hat Differentiationsindex eins: Nach einmaligem Differenzieren erhält man die Gleichungdie nach
auflösbar ist:Diese Tatsache wird manchmal zur Konstruktion von Homotopieverfahren genutzt.
Die Euler-Lagrange-Gleichungen für das mathematische Pendel (mit auf eins normierter Erdbeschleunigung und Pendellänge) lauten
Dieses Algebro-Differentialgleichungssystem hat den Differentiationsindex drei: Zweifache Zeitableitung der Zwangsbedingung (dritte Gleichung) nach der Zeit liefert
Mit Hilfe der zwei Differentialgleichungen in den Euler-Lagrange-Gleichungen lassen sich die zweiten zeitlichen Ableitungen
 und
und  ersetzen, was
ersetzen, wasliefert. Mit
 erhält man daraus die Gleichung
erhält man daraus die GleichungDurch Zeitableitung dieser Gleichung (das ist die dritte Zeitableitung) kommt man dann auf die fehlende Differentialgleichung für λ
wobei wieder die Differentialgleichungen aus den Euler-Lagrange-Gleichungen genutzt wurden, um
 und
und  zu ersetzen und außerdem berücksichtigt wurde, dass
zu ersetzen und außerdem berücksichtigt wurde, dass  gilt.
gilt.Geometrischer Index
Ein mathematisch klar gefasster und geometrisch gut interpretierbarer Begriff ist der geometrische Index eines Algebro-Differentialgleichungssystems. Die Grundidee ist, dass man nach dem im Folgenden dargestellten iterativen Verfahren die maximale Zwangsmannigfaltigkeit ermittelt, auf der die Algebro-Differentialgleichung ein Vektorfeld (als Vektorfeld auf einer Mannigfaltigkeit) beschreibt. Der geometrische Index des Algebro-Differentialgleichungssystems ist dann die minimale Anzahl an Iterationsschritten, die bei diesem Verfahren benötigt wird.
Der geometrische Index ist gleich dem Differentiationsindex[3].
Gegeben sei eine autonome Algebro-Differentialgleichung
mit hinreichend oft differenzierbarer Funktion
 .
.Im Rahmen des Algorithmus wird der
als Mannigfaltigkeit  mit dem Tangentialbündel
mit dem Tangentialbündel  interpretiert. Die Paare
interpretiert. Die Paare  werden auch als Tangentialvektoren des bezeichnet.
werden auch als Tangentialvektoren des bezeichnet.Durch die Funktion f ist die Menge
 festgelegt, die jedem Punkt
festgelegt, die jedem Punkt  alle für Lösungen des Algebro-DGL-Systems zulässigen Geschwindigkeitsvektoren v in diesem Punkt zugeordnet.
alle für Lösungen des Algebro-DGL-Systems zulässigen Geschwindigkeitsvektoren v in diesem Punkt zugeordnet.Es ist möglich, dass für ein Punkt
überhaupt keine Paar (x,v), genau ein solches Paar oder mehrere solcher Paare in N existieren.Die Punkte, durch die eventuell Lösungen gehen können, erfasst man in der Menge
(mit der Projektion pr1 auf die erste Komponente, also
 ). An dieser Stelle soll davon ausgegangen werden, dass M1 eine differenzierbare Untermannigfaltigkeit des darstellt.
). An dieser Stelle soll davon ausgegangen werden, dass M1 eine differenzierbare Untermannigfaltigkeit des darstellt.Jeder Tangentialvektor
 an eine Lösung
an eine Lösung  der Algebro-Differentialgleichung muss auch im Tangentialbündel
der Algebro-Differentialgleichung muss auch im Tangentialbündelvon M1 liegen (dabei bedeutet
 , dass
, dass  eine auf einem Intervall ( − ε,ε) definierte, einmal stetig differenzierbare Kurve ist, die vollständig in M1 liegt).
eine auf einem Intervall ( − ε,ε) definierte, einmal stetig differenzierbare Kurve ist, die vollständig in M1 liegt).Die Tangentialvektoren an Lösungen der Algebro-Differentialgleichung müssen auch in der Menge
 und damit die Lösungen selber in der Menge
und damit die Lösungen selber in der Menge  liegen.
liegen.Diesen Prozess kann man (unter bestimmten Bedingungen) fortsetzen und aus der Zwangsmannigfaltigkeit Mk die Zwangsmannigfaltigkeit
bilden. Es ist möglich, dass ab einem
 jedem Punkt
jedem Punkt  in
in  genau ein Tangentialvektor (x,v) zugeordnet ist. Dann beschreibt ein Vektorfeld auf der Mannigfaltigkeit Mk + 1.
genau ein Tangentialvektor (x,v) zugeordnet ist. Dann beschreibt ein Vektorfeld auf der Mannigfaltigkeit Mk + 1.Der geometrische Index der Algebro-Differentialgleichung ist gerade die minimale Zahl
für die ein Vektorfeld auf der Mannigfaltigkeit Mk + 1 beschreibt.- Beispiel
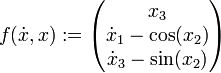
Die durch die Gleichung
definierte Funktion und die zugehörige Algebro-Differentialgleichung dienen im folgenden Text als mitlaufendes Beispiel.
Im Beispiel gibt es für alle Punkte
 , die nicht in der durch x3 = 0 definierten Ebene liegen, keine Paare
, die nicht in der durch x3 = 0 definierten Ebene liegen, keine Paare  . Also verlaufen in diesem Beispiel außerhalb dieser Ebene keine Lösungen der Algebro-Differentialgleichung.
. Also verlaufen in diesem Beispiel außerhalb dieser Ebene keine Lösungen der Algebro-Differentialgleichung.Es ergibt sich
 und
und  und damit
und damitWie man sieht, liegt der durch N vorgegebene Tangentialvektor (x,v) (des
 ) für Werte
) für Werte  mit
mit  wegen
wegen  nicht im Tangentialraum TM1, kann also nicht zu einer Lösung des Algebro-Differentialgleichungssystems korrespondieren. Damit ergibt sich
nicht im Tangentialraum TM1, kann also nicht zu einer Lösung des Algebro-Differentialgleichungssystems korrespondieren. Damit ergibt sichWir erhalten
und die Menge
ordnet jedem Punkt x aus der Menge
 (die hier gerade gleich M2 ist) genau einen Tangentialvektor zu. Bei der Menge ist das noch nicht der Fall, da bei Tangentialvektoren aus dieser Menge die Komponente v2 noch nicht eingeschränkt ist.
(die hier gerade gleich M2 ist) genau einen Tangentialvektor zu. Bei der Menge ist das noch nicht der Fall, da bei Tangentialvektoren aus dieser Menge die Komponente v2 noch nicht eingeschränkt ist.Der geometrische Index des Algebro-Differentialgleichungssystems in diesem Beispiel ist also gleich zwei.
Ist M1 eine Mannigfaltigkeit, so kann diese mit Hilfe einer Funktion
 in der Form
in der Formdargestellt werden. Die einschränkenden Gleichungen g1(x) = 0 in dieser Darstellung werden als Zwangsbedingungen der Algebro-Differentialgleichung bezeichnet.
- Im Beispiel: g1(x) = x3.
Darüber hinaus kann für
 die Mannigfaltigkeit Mk mit Hilfe einer Funktion
die Mannigfaltigkeit Mk mit Hilfe einer Funktion  aus der Mannigfaltigkeit Mk − 1 ausgesondert werden:
aus der Mannigfaltigkeit Mk − 1 ausgesondert werden:  Die Gleichungen gk(x) = 0 mit werden auch als verdeckte Zwangsbedingungen der Algebro-Differentialgleichung bezeichnet (engl.: hidden constraints).
Die Gleichungen gk(x) = 0 mit werden auch als verdeckte Zwangsbedingungen der Algebro-Differentialgleichung bezeichnet (engl.: hidden constraints).- Im Beispiel: g2(x) = sin(x2).
Bemerkungen:
- Dass in diesem Abschnitt nur autonome Algebro-Differentialgleichungen betrachtet werden, erleichtert die geometrische Interpretation und ist nicht wirklich eine Einschränkung, da jede zeitabhängige Algebro-Differentialgleichung
 durch Einführen einer zusätzlichen Variable xn + 1: = t und einer zusätzlichen Differentialgleichung
durch Einführen einer zusätzlichen Variable xn + 1: = t und einer zusätzlichen Differentialgleichung  in eine autonome Algebro-Differentialgleichung umgeschrieben werden kann.
in eine autonome Algebro-Differentialgleichung umgeschrieben werden kann.- In diesem Abschnitt wurde vorausgesetzt, dass
 eine Untermannigfaltigkeit des ist. Falls dies nicht der Fall ist, ist für die betreffende Algebro-Differentialgleichung der geometrische Index nicht erklärt.
eine Untermannigfaltigkeit des ist. Falls dies nicht der Fall ist, ist für die betreffende Algebro-Differentialgleichung der geometrische Index nicht erklärt. - Es existieren auch Algebro-Differentialgleichungen bei denen der geometrische Index unendlich ist.
Konsistente Anfangswerte
Gegeben sei wieder eine Algebro-Differentialgleichung
mit
 hinreichend oft differenzierbar.
hinreichend oft differenzierbar.Ein Punkt
 heißt konsistenter Anfangswert zur Zeit
heißt konsistenter Anfangswert zur Zeit  , falls es eine in einem offenen Intervall mit
, falls es eine in einem offenen Intervall mit  definierte Lösung x der Algebro-Differentialgleichung gibt, für die x(t0) = x0 gilt.
definierte Lösung x der Algebro-Differentialgleichung gibt, für die x(t0) = x0 gilt.Bei der Berechnung ist zu beachten, dass von konsistenten Anfangswerten außer den Zwangsbedingungen auch die verdeckten Zwangsbedingungen zu erfüllen sind (siehe Abschnitt Geometrischer Index).
Literatur
- E. Hairer und G. Wanner: Solving Ordinary Differential Equations II, Stiff and Differential-Algebraic Problems. Second Revised Edition, Springer-Verlag, Berlin, 1996.
- Uri M. Ascher und Linda R. Petzold: Computer Methods for Ordinary Differential equations and Differential-Algebraic equations. SIAM, Philadelphia. 1998. ISBN 0-89871-412-5
- Peter Kunkel und Volker Mehrmann: Differential-Algebraic Equations. EMS Textbooks in Mathematics, EMS Publishing House, Zürich. 2006. ISBN 3-03719-017-5
Einzelnachweise
- ↑ [R.März. The index of linear differential algebraic equations with properly stated leading terms. Results Math. 42 (2002) 308–338
- ↑ René Lamour: Index determination for DAEs, Humboldt University Berlin, Germany, PDF von scientific commons
- ↑ G. Reißig: Beiträge zur Theorie und Anwendungen impliziter Differentialgleichungen. Dissertation, Dresdner Universitätsverlag, 1998.

























Wikimedia Foundation.