- Erweiterter Euklidischer Algorithmus
-
Der erweiterte euklidische Algorithmus ist ein Algorithmus aus dem mathematischen Teilgebiet der Zahlentheorie. Er berechnet neben dem größten gemeinsamen Teiler
 zweier natürlicher Zahlen a und b noch zwei ganze Zahlen s und t, die die folgende Gleichung erfüllen
zweier natürlicher Zahlen a und b noch zwei ganze Zahlen s und t, die die folgende Gleichung erfüllenDer Algorithmus ist eine Erweiterung des bereits in der Antike bekannten euklidischen Algorithmus, der nur den größten gemeinsamen Teiler berechnet.
Das Haupteinsatzgebiet des erweiterten euklidischen Algorithmus ist die Berechnung der inversen Elemente in ganzzahligen Restklassenringen. Dies ist die Grundlage für die Lösung von diophantischen Gleichungen oder allgemeiner von ganzzahligen linearen Gleichungssystemen. Ebenso ist die Bestimmung inverser Elemente eine Grundlage für den chinesischen Restsatz, welcher wiederum Grundlage des bedeutenden Tricks der kleinen Primzahlen in der berechenbaren Algebra ist. Dabei wird eine Aufgabe in mehreren endlichen Körpern gelöst und diese Teillösungen in immer größere Restklassenringe gehoben, bis sich eine ganzzahlige Lösung ablesen lässt. Der Algorithmus liefert zudem einen konstruktiven Beweis für das Lemma von Bézout.
Inhaltsverzeichnis
Funktionsweise am Beispiel
Die am weitesten bekannte Version des euklidischen Algorithmus bezieht sich auf den Bereich der ganzen Zahlen. Jedoch kann er wortwörtlich auf jeden Ring angewandt werden, in welchem eine Division mit kleinstem Rest durchgeführt werden kann. Solche Ringe werden euklidisch genannt, ein Beispiel ist der Polynomring in einer Variablen mit rationalen oder reellen Koeffizienten. In diesem kann immer ein eindeutig bestimmter Rest mit kleinstem Grad gefunden werden.
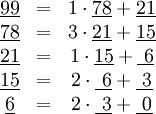
Betrachten wir ein Beispiel. Zu der Vorgabe der Zahlen 99 und 78 produziert der einfache euklidische Algorithmus die Folge von Divisionen mit Rest:
und 3 ist ein Teiler von 6 und damit der gesuchte größte gemeinsame Teiler von 99 und 78. Nun kann man diese Gleichungen rückwärts lesen und den Rest jeweils als Differenz der beiden anderen Terme darstellen. Setzt man diese Restdarstellungen rekursiv ineinander ein, so ergeben sich verschiedene Darstellungen des letzten Restes 3:
Der größte gemeinsame Teiler ist so als ganzzahlige Linearkombination der beiden Ausgangszahlen 78 und 99 dargestellt.
In der eben dargestellten Berechnungsvorschrift muss man erst den letzten Schritt des einfachen euklidischen Algorithmus abwarten, bevor die Berechnung der gesuchten Koeffizienten beginnen kann. Man kann aber auch ebenso alle anderen Reste als ganzzahlige Linearkombination von 78 und 99 darstellen und die zugehörigen Koeffizienten in jedem Schritt des einfachen euklidischen Algorithmus mit bestimmen:
Tabellarische Darstellung
Rekursive Variante
Die Zwischenergebnisse beider Berechnungsmöglichkeiten lassen sich übersichtlich in Tabellen darstellen. Für die erste Variante, bei der die Folge der Divisionen mit Rest rückwärts aufgearbeitet wird, kann dies die folgende Gestalt annehmen:
a b q s t 99 78 1 78 21 3 21 15 1 15 6 2 6 3 2 3 0 a b q s t 99 78 1 78 21 3 21 15 1 15 6 2 6 3 2 3 0 1 0 a b q s t 99 78 1 -11 14 78 21 3 3 -11 21 15 1 -2 3 15 6 2 1 -2 6 3 2 0 1 3 0 1 0 Dabei wird zuerst, wie in der linken Tabelle, der einfache euklidische Algorithmus ausgeführt. Die Division mit Rest hat dabei immer die Form a=q·b+r, wobei q und r bestimmt werden. q wird in der Zeile vermerkt, das Paar (b,r) wird an die Stelle des Paars (a,b) in der nächsten Zeile eingetragen. Diesen Schritt wiederholen wir solange, bis in der Spalte von b eine Null steht.
Bis zu diesem Punkt haben wir den einfachen euklidischen Algorithmus ausgeführt und können in der linken unteren Ecke den größten gemeinsamen Teiler ablesen. In unserem Fall die Drei. Nun beginnt die Berechnung der ganzzahligen Koeffizienten s und t. In jeder Zeile soll dabei 3=s·a+t·b gelten. Dementsprechend tragen wir in der letzten Zeile s = 1 und t = 0 ein, es ergibt sich die mittlere Tabelle.
Nun arbeitet man sich von unten nach oben. Für das s nimmt man das t der darunterliegenden Zeile. Das t berechnet sich aus dem q der jeweiligen Zeile und dem s und t der darunterliegenden Zeile.
Für die vorletzte Zeile ergibt sich so s = 0 und
 , darüber dann s = 1 und
, darüber dann s = 1 und  , usw.
, usw.Diesen Schritt wiederholen wir solange, bis die Tabelle ausgefüllt ist. Es ergibt sich die rechte Tabelle. Die Einträge für s und t in der ersten Zeile sind die gesuchten Werte. Der größte gemeinsame Teiler findet sich, wie schon erwähnt, in der unteren linken Ecke. Für das Beispiel gilt damit
Induktive Variante
Gegeben sind wieder die Werte 99 und 78:
Wie sich aus dem Beispiel ablesen lässt, hängt der aktuelle Rechenschritt von den Zwischenergebnissen der zwei vorhergehenden Rechenschritte ab. Dem kann Rechnung getragen werden, indem bei der Initialisierung eine Hilfszeile vorangestellt wird. Weiter werden, der Übersicht halber, Hilfsvariablen u und v mit einer eigenen Spalte eingefügt.
a b q u s v t 0 99 0 0 1 0 0 99 78 1 1 0 0 1 a b q u s v t 0 99 0 0 1 0 0 99 78 1 1 0 0 1 78 21 3 0 1 1 -1 21 15 1 1 -3 -1 4 15 6 2 -3 4 4 -5 6 3 2 4 -11 -5 14 3 0 -11 26 14 -33 Um die jeweils nächste Zeile zu bestimmen, werden folgende Operationen ausgeführt:
- Es wird die Division mit Rest ausgeführt,
 und aneu = b sowie bneu = r gesetzt.
und aneu = b sowie bneu = r gesetzt. - Die neuen Werte der Hilfsvariablen werden aus der aktuellen Zeile übernommen, uneu = s und vneu = t.
- Die neuen Koeffizienten ergeben sich durch
 und
und 
Durch diese Vorschrift gelten in jeder Zeile die Beziehungen
 und
und  ,
,
hier mit den Ausgangswerten aorig = 99 und borig = 78. Aus den letzten zwei Zeilen liest man daher ab, dass 3 der größte gemeinsame Teiler ist und
 gilt.
gilt.Ist man mit dieser Methode vertraut genug, so kann man in der Tabelle die Spalten a, u und v weglassen, da diese nur bereits weiter oben stehende Einträge wiederholen. Weitere Beispiele in dieser verknappten Form sind in den folgenden Tabellen dargestellt:
k. b q s t -1. aorig=122 – 1 0 0. borig=22 5 0 1 1. 12 1 1 -5 2. 10 1 -1 6 3. 2=ggT 5 2=s -11=t 4. 0– – – k. b q s t -1. aorig=120 – 1 0 0. borig=23 5 0 1 1. 5 4 1 -5 2. 3 1 -4 21 3. 2 1 5 -26 4. 1=ggT – -9=s 47=t Allgemeine mathematische Grundlage
Der euklidische Algorithmus erzeugt zu vorgegebenen ganzen Zahlen a und b (allgemein: Elementen eines euklidischen Rings) zwei Folgen: eine Folge (qk)k von Quotienten und eine Folge (rk)k von Resten, wobei
 . In jedem Schritt k=1,2,... gilt dabei
. In jedem Schritt k=1,2,... gilt dabei , | rk + 1 | < | rk | .
, | rk + 1 | < | rk | .
Nach endlich vielen Schritten ergibt sich der Rest Null.
Wir gehen nun zu Restklassen modulo b über. Es ist trivial zu sehen, dass
 und
und  Vielfache von a nach Hinzufügen oder Abziehen von Vielfachen von b sind. Genauer sind die Restklassen [rk]b Vielfache der Restklasse [a]b für k=0,1, und nach Rekursionsvorschrift auch für k=2,3,.... Es kann also eine Folge von Multiplikatoren (sk)k konstruiert werden, die mit s0 = 1 und s1 = 0 initialisiert ist, so dass
Vielfache von a nach Hinzufügen oder Abziehen von Vielfachen von b sind. Genauer sind die Restklassen [rk]b Vielfache der Restklasse [a]b für k=0,1, und nach Rekursionsvorschrift auch für k=2,3,.... Es kann also eine Folge von Multiplikatoren (sk)k konstruiert werden, die mit s0 = 1 und s1 = 0 initialisiert ist, so dassgilt. Es ergibt sich die rekursive Beziehung
 .
.
Man kann diese Rekursion in folgende Abfolge von Schritten für den erweiterten euklidischen Algorithmus fassen:
- Erhalte a und b als Eingabe.
- Setze k=0, , s0 = 1 und s1 = 0.
- Wiederhole:
- Erhöhe k um eins.
- Bestimme den ganzzahligen Quotienten
 .
. - Setze
 und
und  .
.
- bis rk + 1 = 0 gilt.
- Gib den Rest
 und die Zahl sk mit
und die Zahl sk mit  zurück.
zurück.
Jeder Schritt enthält implizit auch einen Multiplikator
 , wobei diese Division keinen Rest lässt. Die Folge (tk)k kann auch explizit bestimmt werden, es gelten t0 = 0, t1 = 1 und
, wobei diese Division keinen Rest lässt. Die Folge (tk)k kann auch explizit bestimmt werden, es gelten t0 = 0, t1 = 1 und .
.
Nach dem letzten Schritt ergibt sich nun

Der Übersicht halber werden beim händischen Rechnen auch noch die Hilfsfolgen (ak = rk − 1)k und (bk = rk)k sowie (uk = sk − 1)k sowie (vk = tk − 1)k mitgeführt.
Algorithmische Umsetzung
Rekursive Variante
Für den erweiterten euklidischen Algorithmus existiert auch eine rekursive Variante, die durch den folgenden Pseudocode gegeben ist:[1]
a,b: zwei Zahlen für die der erweiterte euklidische Algorithmus durchgeführt wird extended_euclid(a,b) 1 wenn b = 0 2 dann return (a,1,0) 3 (d',s',t') extended_euclid(b, a mod b)
4 (d,s,t) (d',t',s' - floor(a/b)t')
5 return (d,s,t)
extended_euclid(b, a mod b)
4 (d,s,t) (d',t',s' - floor(a/b)t')
5 return (d,s,t)
Tricks zur effizienten Computerimplementierung
Darstellung mittels Matrizen
Versieht man die Variablen des euklidischen Algorithmus mit Indizes für den Iterationsschritt, so wird im Schritt k die Division mit Rest
 ausgeführt. Im Übergang zum nächsten Schritt wird
ausgeführt. Im Übergang zum nächsten Schritt wird  und
und  gesetzt. Bildet man aus m und n einen Spaltenvektor, so hat der gesamte Schritt eine Darstellung mit Übergangsmatrix,
gesetzt. Bildet man aus m und n einen Spaltenvektor, so hat der gesamte Schritt eine Darstellung mit Übergangsmatrix, .
.
Terminiert der Algorithmus nach L Schritten, so gilt
 und daher
und daher  . Setzt man die Bildungsvorschriften der Spaltenvektoren ineinander ein, so ergibt sich die Verbindung zwischen dem ersten und dem letzten Spaltenvektor durch ein Matrizenprodukt,
. Setzt man die Bildungsvorschriften der Spaltenvektoren ineinander ein, so ergibt sich die Verbindung zwischen dem ersten und dem letzten Spaltenvektor durch ein Matrizenprodukt, .
.
Durch Multiplikation mit dem Zeilenvektor (1,0) wird die erste Zeile auf beiden Seiten extrahiert, somit gilt
 .
.
Die verschiedenen Arten, das Matrixprodukt der letzten Identität auszurechnen, ergeben die verschiedenen Varianten des erweiterten euklidischen Algorithmus. In der klassischen Variante, in welcher die Divisionen mit Rest von der letzten beginnend ausgewertet werden, entspricht der Bildung der Matrixprodukte beginnend von links. Diese entspricht dem nachfolgenden rekursiven Algorithmus. Es wird (s1,t1) = (1,0) gesetzt und rekursiv
 , k=1,...,L
, k=1,...,L
bestimmt. Am Ende gilt
 . Es müssen aber zuerst alle Quotienten bestimmt werden, bevor der erste Rekursionsschritt ausgeführt werden kann.
. Es müssen aber zuerst alle Quotienten bestimmt werden, bevor der erste Rekursionsschritt ausgeführt werden kann.
Beginnt man die Produktbildung von rechts, so wird der Quotient der Division mit Rest in dem Augenblick benutzt, in dem er bestimmt wurde und kann danach vergessen werden. Dies entspricht dem am Anfang angegebenen Algorithmus, in welchem am Anfang festgesetzt und
festgesetzt und  für k=1,...,L
für k=1,...,L
iteriert wird. Insgesamt ergibt sich und damit
 .
.
Am Ende gilt
, wobei wegen der Beziehungen  und
und  der letzte Iterationsschritt auch weggelassen werden kann.
der letzte Iterationsschritt auch weggelassen werden kann.Quellen
- ↑ Thomas H. Cormen, Charles Leiserson, Ronald L. Rivest: Introduction to Algorithms. MIT Press, 2001, ISBN 0262531968
Weblinks
- Ein kleines Script findet sich unter http://www.mirsky.de/ggt.php. Jeder Schritt wird genau erklärt.
- Außerdem gibt es noch ein ausführliches Skript mit Quelltext unter [1].
- Online Tool zur Berechnung des größten gemeinsamen Teilers http://www.johannes-bauer.com/thi/eea.php





Wikimedia Foundation.