- Handhabungseinrichtung
-
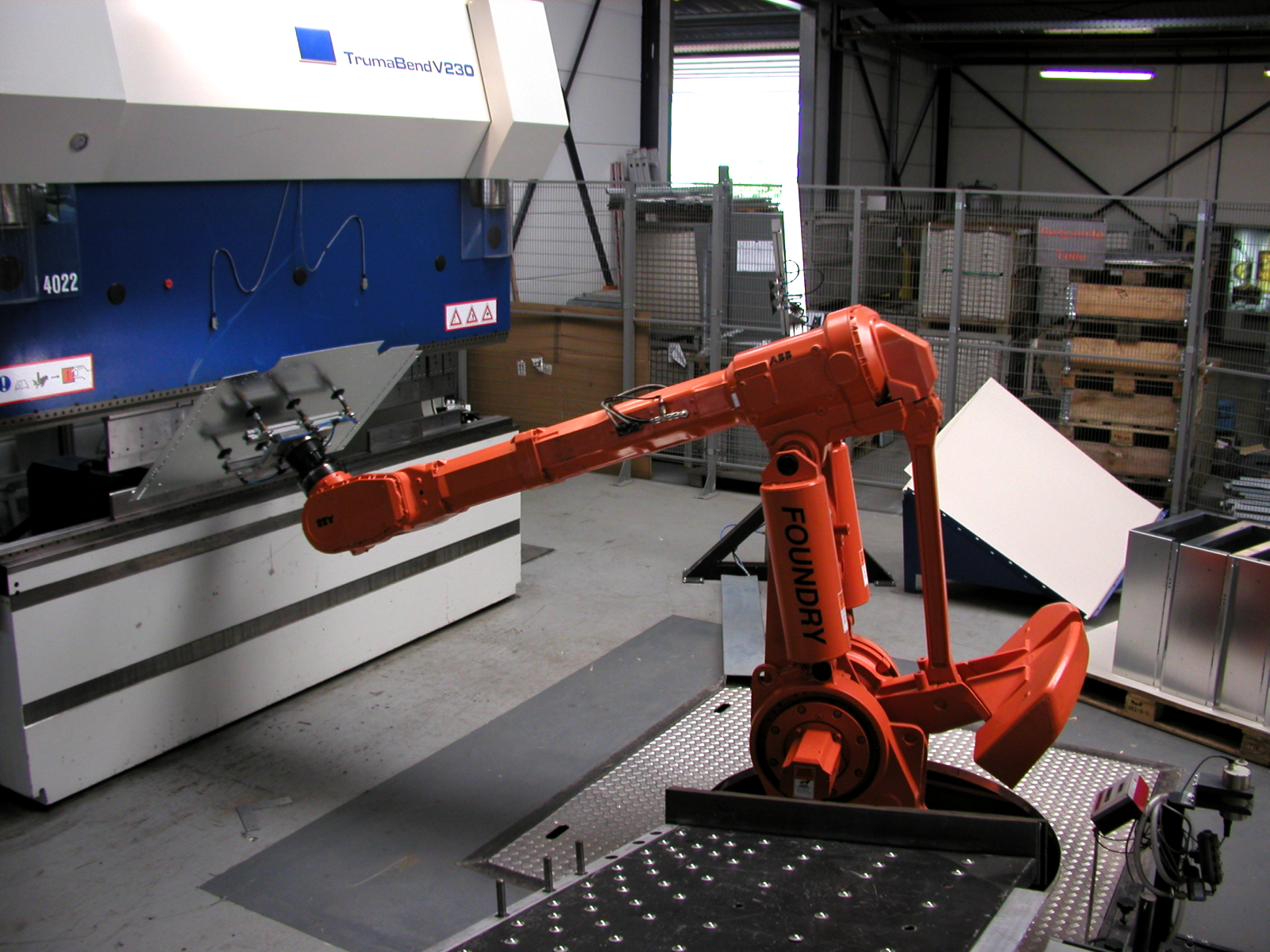
 Industrieroboter handhabt Blech an einer Gesenkbiegepresse
Industrieroboter handhabt Blech an einer Gesenkbiegepresse
Als Handhabungseinrichtung (englisch handling device, handling equipment; auch Handlingsystem,Handlingmodul, Balanceroder Manipulator) wird in der Automatisierungstechnik und Antriebstechnik ein Gerät bezeichnet, das den Materialfluss von oder zu einer Wirkstelle bewältigt.
Der Hauptunterschied zu den Industrierobotern liegt in den Anwendungsgebieten und den Aspekten menschlicher Arbeitskraft.
Vom Handhaben ist das Fördern und Lagern zu unterscheiden, die beide ebenfalls zum „Bewirken von Materialfluss“ zählen, aber keine definierte Orientierung des Werkstücks bewirken. Sie werden in einer eigenen VDI-Richtlinie 2860 behandelt.
Beim Handhaben wird eine definierte Pose eines geometrisch definierten Objekts entweder geschaffen, oder für eine begrenzte Zeit aufrechterhalten. Weitere Forderungen können hinzukommen (siehe unten „Handhabungsfunktionen“). Typische Handhabungseinrichtungen sind programmgesteuert, z. B. Industrieroboter oder Einlegegeräte.
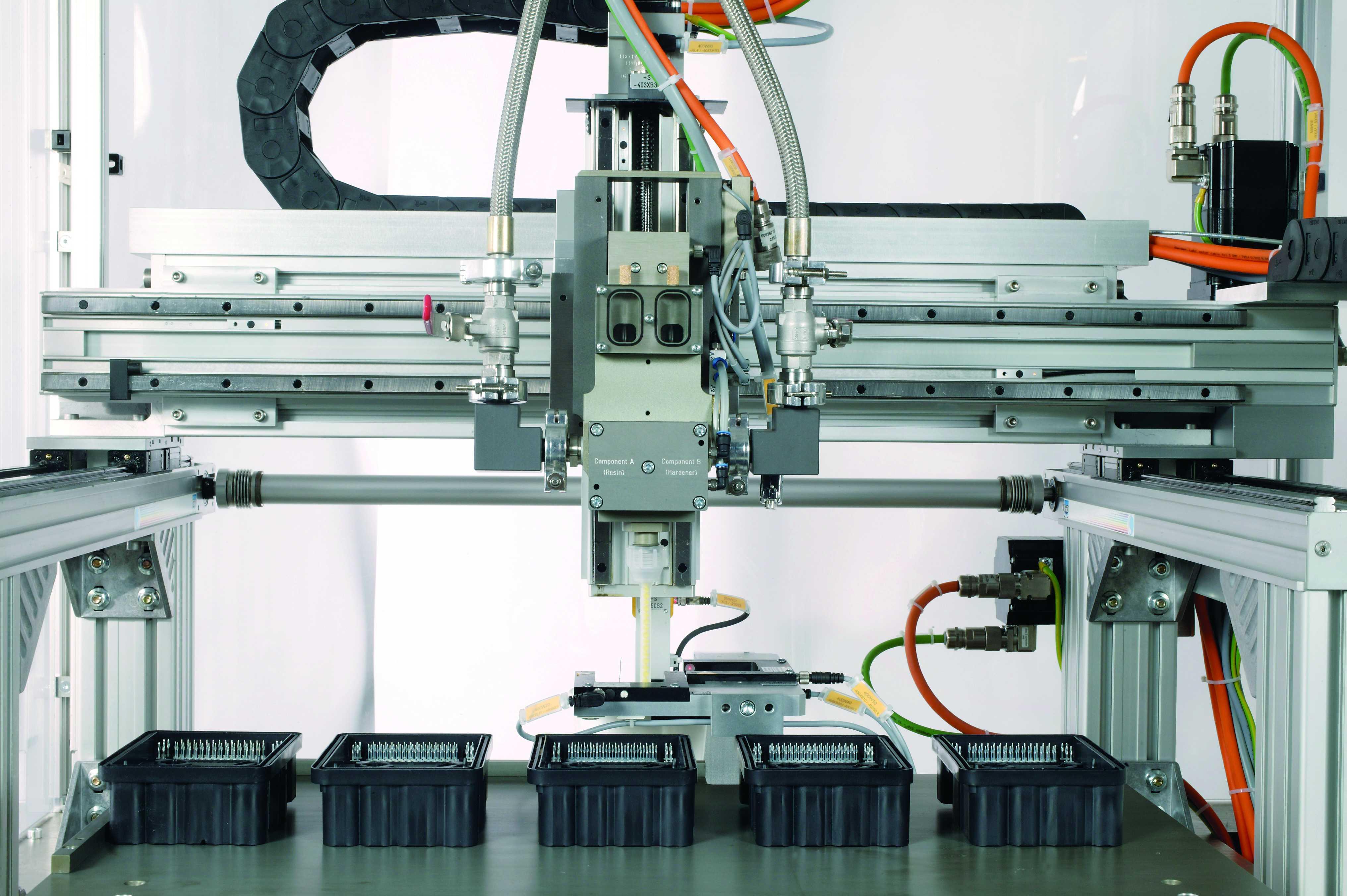
Die Begriffe Handlingsysteme und Handlingmodule werden vor allem in der Lineartechnik verwendet, wo zum Beispiel mit Hilfe von Aluminiumprofilen, Linearführungen und verschiedenen Linearantrieben ganze Portalroboter (ähnlich der im Bild rechts gezeigten Dosieranlage) zu Handlingzwecken aufgebaut werden.
Mit Pick-and-Place-Anwendungen werden Handhabungseinrichtungen bezeichnet, die mittels eines Greifers Bauteile aufnehmen und am Zielort platzieren. Je nach erforderlicher Positioniergenauigkeit kann dazu auch ein Positioniersystem verwendet werden.
Inhaltsverzeichnis
Typen
 Handhabungsgerät mit Säule im Einsatz
Handhabungsgerät mit Säule im EinsatzStationär
Eine Möglichkeit ist den Manipulator mit einer Säule auszustatten, ähnlich einem Säulenschwenkkran. Der Arbeitsradius ist etwas kleiner, allerdings wird kein Stahlbau und kein Schienensystem benötigt.
Mobil
Durch das Einhängen des Manipulators in ein Schienensystem ist es möglich, einen sehr großen Arbeitsradius zu gewährleisten. Grundbedingung ist eine Infrastruktur, z. B. ein Stahlbau. Die Schienen sind so konzipiert, dass die Reibung, die beim Bewegen des Schienenwagens auftritt, auf ein Minimum reduziert wird
Handhabungsfunktionen
- Speichern
- Bunkern (ungeordnetes Speichern)
- Magazinieren (geordnetes Speichern)
- Stapeln
- Palettieren
- Verändern der Menge
- Zuteilen
- Verzweigen
- Vereinigen
- Vereinzeln
- Portionieren
- Kontrollieren
- Identität
- Sichern
- Spannen (Halten)
- kraftschlüssig Spannen
- formschlüssig Spannen
- reibschlüssig Spannen
- Greifen
- Entspannen (Lösen)
- Spannen (Halten)
- Bewegen
- Positionieren
- Orientieren
- Ordnen
- Verschieben
- Schwenken
- Fördern
- Drehen
- Weitergeben (Rundtakten)
- Weitergeben (Lineartakten)
- Wirken (Vorschieben)
Handhabungseinrichtungen übernehmen in der Regel mehrere der obigen Funktionen, werden aber nach ihrer Gerätehauptfunktion unterschieden. So übernimmt ein Vibrationswendelförderer zwar auch Funktionen wie Bunkern, Zuführen, Kontrollieren, usw., seine Hauptfunktion ist aber das Ordnen.
Kenngrößen von Handhabungskinematiken (Handhabungssystemen)
Kenngrößen von Kinematiken lassen sich in vier Bereiche aufteilen. Kategorien, die für technische Produkte allgemein gelten wie die Wartung oder Lebensdauer sind darin nicht enthalten:
- Kenngrößen der Geometrie
- Wie ist der Raum aufgeteilt?
- Wie grenzt sich das System mechanisch ab?
- Wie viele Freiheitsgrade besitzt der Flansch zum Endeffektor?
- Kenngrößen der Belastung
- Welche Belastungen sind am Flansch zum Endeffektor durch Gewicht und Massenträgheit möglich?
- Kenngrößen zur Kinematik
- Welche Geschwindigkeiten und Beschleunigungen sind möglich?
- Kenngrößen der Genauigkeit
- Welche Bahn- und Positionsgenauigkeiten sind erreichbar?
Zu beachten ist dabei, dass die Kenngrößen der Genauigkeit, Kinematik (Zykluszeit) und der Belastung (Nutzlast) stark voneinander abhängig sind. Beim Anfahren einer Position durch einen Handhabungsroboter kommt es zum Überschwingen. Das System pendelt sich innerhalb einer erforderlichen Stabilisierungszeit immer exakter auf der Zielposition ein. Die Angabe der Genauigkeit eines Roboters ist somit erst in Verbindung mit der Zykluszeit aussagekräftig. Folgende Begriffe finden sich in der VDI 2860 diesbezüglich näher erläutert:
- Drift
- Austauschbarkeit
- Stabilisierungszeit
- Überschwingen
Es ist fraglich, ob allein mit Kenngrößen eine hinreichende Beschreibung und Bewertung von Handhabungskinematiken möglich ist. Die Kenntnis von Komponenten und dem kinematischen Aufbau ist hierfür zu empfehlen.
Achskomponenten von Handhabungskinematiken
Gliederung für Achskomponenten:
- Antrieb
- Kraftübertragungssystem
- Wegmesssystem
- Lagerung
Schwachstellen und Fehler können bei Handhabungskinematiken vor allem durch Reibung und Spiel in den Lagern und durch die Auflösung der Wegmesssysteme hervorgerufen werden. Hierbei sind auch Fehler durch statische Verformung und dynamische Nachgiebigkeit der Gesamtstruktur zu erwähnen.
Funktionsweise
Die meisten Manipulatoren basieren auf einem pneumatischen System, d. h., in einem Zylinder sorgt Druckluft dafür, dass die Lasten schwerelos werden. Erkannt werden die Lasten entweder von einer automatischen Waage am Greifer oder per Voreinstellung des Werkers.
Eine Koppelung mit einer speicherprogrammierbaren Steuerung (SPS) ist ebenfalls möglich. Diese vereinfacht komplexe Abläufe mit elektrischer Unterstützung. Auch kann das Gerät bei absehbaren Veränderungen einfacher umgestellt werden.
Vor- und Nachteile
Es werden die Stärken menschlicher Arbeit auf die Maschine übertragen:
- Vorteil menschlicher Sensorik, d. h., die Fähigkeit des Menschen bei eventuell auftretenden Problemen einzuschreiten. Beispiele wären wenn die Teile falsch im Träger liegen würden, oder wenn ein Mensch im Arbeitsbereich auftauchen würde.
- Je nach Anforderung und spezifischen Anwendungen ist der Aufwand und die Schnelligkeit vorteilhafter. Beispielhaft wäre der Fall eines Automobilherstellers. Dieser erkannte, dass der Aufwand für einen qualifizierten Techniker, der den Industrieroboter überwachte höher war, als der eines direkten Bedieners, bei gleicher Schnelligkeit.
Ebenso werden die Nachteile menschlicher Arbeit auf die Maschine übertragen:
- Im Krankheitsfall steht die Maschine still.
- Der Manipulator ist immer nur so schnell wie der Mensch.
Hinweise
Manipulatoren fallen nicht unter die Kategorie Kran. Siehe hierzu BGV D6 Krane §2.
Literatur
- Stefan Hesse, Heinz Schmidt, Uwe Schmidt: Manipulatorpraxis. Vieweg Verlag, 2001, ISBN 978-3-5280-3949-3.
- Stefan Hesse, Heinz Schmidt: Rationalisieren mit Balancern und Hubeinheiten. Grundlagen und praktische Anwendung. Expert-Verlag, 2000, ISBN 978-3-8169-1424-2.
- VDI: VDI-Richtlinie 2860: Montage- und Handhabungstechnik; Handhabungsfunktionen, Handhabungseinrichtungen; Begriffe, Definitionen, Symbole. 1990.
- VDI: VDI-Richtlinie 2861: Montage- und Handhabungstechnik; Kenngrößen für Industrieroboter. 1988.
- Speichern

Wikimedia Foundation.