- Motorordnung
-
 Abb. 1: Schemazeichnung einer Hubkolbenmaschine
Abb. 1: Schemazeichnung einer HubkolbenmaschineEin Hubkolbenmotor ist ein Motor, der die Volumenänderung eines Gases über hin- und hergehende Kolben in eine Drehbewegung umsetzt. Er zählt zu den Kolbenmaschinen.
Inhaltsverzeichnis
Funktionsprinzip
Die Ausdehnung des Gases in einem Zylinder verrichtet Arbeit an einem Kolben, die durch eine Pleuelstange auf die Kurbelwelle übertragen wird. So wird die oszillierende Bewegung des Kolbens in eine Drehbewegung umgesetzt, wobei prinzipiell zwei kinematische Bauformen möglich sind:
Die erste ist der (herkömmliche) Standmotor, bei dem die Zylinder fixiert sind und die Kurbelwelle sich dreht. Dadurch können die Kolben Arbeit über die Pleuel an die Kurbelwelle abgeben (Abb. 1).
Die zweite Form ist als Umlaufmotor bekannt. Beim Umlaufmotor ist die Kurbelwelle fixiert und die Hubzapfen sowie die Zylinder sind drehbar gelagert. Dabei rotieren die Zylinder auf einer anderen Achse als der Hubzapfen (exzentrisch), wodurch der Hub der einzelnen Kolben in den Zylindern zustande kommt.
Beispiele für Hubkolbenmotoren sind:
Sternmotor
Hubkolbenmotoren werden auch nach der Zahl und Anordnung der Kolben je Brennraum eingeteilt:
- normaler Hubkolbenmotor mit einem Kolben je Brennraum (bei weitem am häufigsten)
- Doppelkolbenmotor mit zwei Kolben in parallelen Zylindern, die miteinander verbunden sind
- Gegenkolbenmotor mit zwei gegeneinander arbeitenden Kolben im gleichen Zylinder
Sie werden auch nach der Zahl und Anordnung der Zylinder eingeteilt:
- Reihenmotor
- V-Motor
- Boxermotor
- Sternmotor
- W-Motor (und weitere)
Massenkräfte
In Folge der Hubbewegung der Kolben und Pleuel sowie infolge des ungleichförmigen Übertragungsverhaltens des Kurbeltriebs treten Massenkräfte auf, die sich in den Motorlagern abstützen und benachbarte Strukturen zu Schwingungen anregen.
Die Massenkräfte der linear bewegten Teile des Kurbeltriebes (oszillierende Massen) lassen sich durch folgende Formel näherungsweise berechnen:

 : Oszillierende Massenkraft
: Oszillierende Massenkraft
 : Oszillierende Masse
: Oszillierende Masse
 : Kurbelradius
: Kurbelradius
 : Winkelgeschwindigkeit der Kurbelwelle
: Winkelgeschwindigkeit der Kurbelwelle
 : Verhältnis von Kurbelradius zu Pleuellänge
: Verhältnis von Kurbelradius zu Pleuellänge
 : Zeit seit Durchlaufen des oberen Totpunktes
: Zeit seit Durchlaufen des oberen Totpunktes
Da es sich bei dem Ausdruck in der Klammer um die ersten zwei Glieder einer Reihenentwicklung handelt, bezeichnet man als Massenkraft 1. Ordnung,
als Massenkraft 1. Ordnung,  als Massenkraft 2. Ordnung.
als Massenkraft 2. Ordnung.Theoretisch treten nicht nur 1. und 2. Ordnung auf, sondern unendlich viele Ordnungen, die jedoch ab der 3. Ordnung aufgrund ihrer geringen Größe meistens vernachlässigbar sind.
Massenausgleich
 Abb.2: Lanchester-Ausgleich
Abb.2: Lanchester-AusgleichDie rotierenden Massen des Kurbeltriebs können durch Gegengewichte an der Kurbelwelle ausgeglichen werden.
Oszillierende Massenkräfte 1. und 2. Ordnung können bei Mehrzylindermotoren durch eine geschickte Anordnung der Zylinder vermieden oder vermindert werden. Bei Reihenmotoren mit weniger als 6 Zylindern und V-Motoren mit weniger als 8 Zylindern kommen oft Ausgleichswellen zum Einsatz.
Um Massenkräfte 2. Ordnung auszugleichen, benötigt man mindestens 6 Zylinder beim Reihenmotor oder 8 Zylinder beim V-Motor, oder Ausgleichswellen, auf denen entsprechende Ausgleichsunwuchten mit doppelter Kurbelwellen-Drehzahl umlaufen (zum Beispiel Lanchester-Ausgleich (Abb.2)).
Eine andere Möglichkeit, einen völligen Massenausgleich zu erreichen (und zwar nicht nur nach o.g. Näherungsrechnung), besteht in der Verwendung von zwei gegenläufig rotierenden Kurbelwellen, wie z. B. beim H-Motor. Dadurch lassen sich selbst 2-Zylinder-Motoren völlig auswuchten.Drehungleichförmigkeit
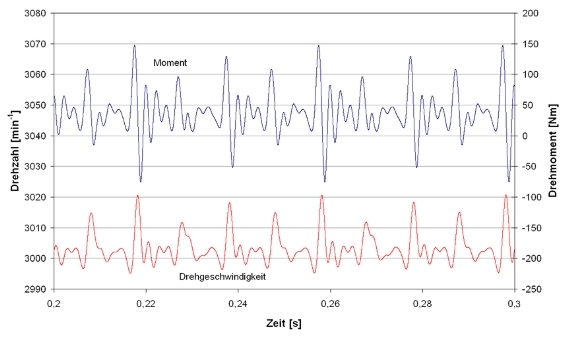
Da Hubkolbenmotoren nicht wie etwa Turbinen kontinuierlich laufen, sondern einen in verschiedene Takte aufgeteilten Prozess durchlaufen, kommt es an der Kurbelwelle zu einer Drehzahl- und Momentenpulsation, die um einen stationären Mittelwert schwankt (Abb. 3).
 Abb. 3: Momentenpulsation und Drehungleichförmigkeit
Abb. 3: Momentenpulsation und DrehungleichförmigkeitDie Form der Drehunförmigkeit wird bestimmt durch die Anzahl der Zylinder, dem Druckverlauf im Zylinder, die Geometrie und Massen der Motorbauteile sowie dem Arbeitsverfahren (Zweitakt- bzw. Viertaktverfahren) sowie dem Betriebspunkt (Last/Drehzahl) des Motors. Der Nebenantrieb der Nockenwelle und der Sekundärantrieb von Nebenaggregaten können ebenfalls einen Einfluss haben.
Diese sog. Drehungleichförmigkeit ist die Ursache für Torsions-Schwingungen im nachgeschalteten Antriebsstrang, die häufig auch zu unangenehmen Motorgeräuschen führen. Um diese zu reduzieren, kommen Zweimassenschwungräder oder Torsionsschwingungs-Tilger beziehungsweise -Dämpfer zum Einsatz.
Literatur
- Richard van Basshuysen; Fred Schäfer: Handbuch Verbrennungsmotor Grundlagen, Komponenten, Systeme, Perspektiven. Wiesbaden: Vieweg, 3. Auflage 2005, ISBN 3528239336
- Eduard Köhler: Verbrennungsmotoren. Motormechanik, Berechnung und Auslegung des Hubkolbenmotors. Wiesbaden: Vieweg, 3. Auflage 2002, ISBN 3528231084
Weblinks
 Bauweisen von Verbrennungsmotoren
Bauweisen von VerbrennungsmotorenEinzylindermotor | Reihenmotor | Boxermotor | V-Motor | U-Motor | W-Motor | Y-Motor | VR-Motor | X-Motor | H-Motor | Δ-Motor
Sternmotor | Reihensternmotor | Mehrfachsternmotor | Umlaufmotor | Taumelscheibenmotor
Gegenkolbenmotor | Freikolbenmotor | Rotationskolbenmotor | Schiebermotor

Wikimedia Foundation.