- Omnidirektionale Kamera
-
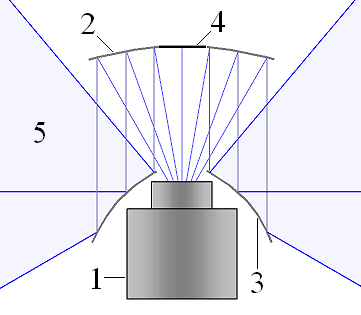
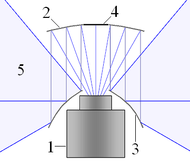 Schematischer Aufbau einer omnidirektionalen Kamera mit zwei Spiegeln:
Schematischer Aufbau einer omnidirektionalen Kamera mit zwei Spiegeln:
1: Kamera
2: oberer Spiegel
3: unterer Spiegel
4: „schwarzer Fleck“
5: Blickfeld (hellblau)Omnidirektionale Kameras sind in der Lage, Bilder aus allen Richtungen in einem Bereich von 360 Grad horizontal als auch vertikal aufzunehmen, während Panorama-Kamerasysteme „lediglich“ eine 360-Grad-Hemisphäre abbilden können. Trotz dieses Unterschiedes wird der Begriff „omnidirektional“ fälschlicherweise auch für Panorama-Kamerasysteme verwendet. Die Fähigkeit die ganze Sphäre abzubilden wird auch als Omnivision bezeichnet. (Omni von lateinisch omnis „jeder“ oder „ganz“)
Inhaltsverzeichnis
Aufbau
Omnidirektionale Kameras sind je nach System verschieden aufgebaut. Katadioptrische Sichtsysteme bestehen in ihrer Grundform aus einer Kamera mit Objektiv und einem dazugehörigen Spiegel. Der Name dieses Systems erklärt sich durch die Verwendung von Linsen (Dioptrik – Optik brechender Systeme) im Objektiv und dem frontal zur Kameralinse befestigten Spiegel (Katoptrik – Optik reflektierender Systeme). Der Spiegel sollte dabei so beschaffen sein, dass er die Lichtstrahlen eines möglichst großen horizontalen und vertikalen Bereiches der Umgebung in Richtung Kameralinse reflektiert. Omnidirektionale Kamerasysteme können schnell recht groß ausfallen. Um dem entgegenzuwirken, besteht die Möglichkeit gefaltete omnidirektionale Kamerasysteme einzusetzen. Der Weg des Lichtes wird bei dieser Methode „gefaltet“, also mithilfe eines zweiten Spiegels so verändert, dass die Größe des Gesamtsystems verringert werden kann. Durch die unterschiedliche Kombination verschiedener Spiegeltypen entsteht eine sehr große Vielfalt verschiedener Systeme. Zur Aufnahme selbst werden entweder perspektivische oder orthografische Kameras verwendet.
Bauformen
Kameras mit Spiegeln (katadioptrische Systeme)
 Omnidirektionale Kamera mit zwei Spiegeln.
Omnidirektionale Kamera mit zwei Spiegeln.
1: Kamera
2: unterer Spiegel
3: Öffnung
4: Glasgehäuse
5: Deckel und oberer Spiegel (verdeckt)Katadioptrische Bildsysteme stellen die derzeit wohl erfolgversprechendste Form omnidirektionaler Bildaufzeichnung in der Robotik dar. Sie bestehen aus einer Kombination von Kamera, Linsen (dioptrics) und Spiegeln (catoptrics). Dabei wird ein Spiegel so vor dem Objektiv der Kamera befestigt, dass er die Lichtstrahlen von allen Seiten in Richtung Objektiv lenkt. Die Kameras, die größtenteils senkrecht auf den Robotern installiert werden, erfassen mit dieser Konstruktion ein Sichtfeld von bis zu 360 Grad horizontal. Die Arten der dabei eingesetzten Spiegel reichen von planaren, konischen, hyperbolischen, sphärischen, elliptischen bis hin zu parabolischen Formen.
Mosaikbasierte Kameras
Werden mehrere „normale“ Kameras in einem Verbund zusammengeschlossen, so spricht man von mosaikbasierten Kameras. Jede dieser Kameras nimmt dabei einen kleinen Bereich der Umgebung auf. Anschließend werden die Einzelbilder wie Mosaiksteine aneinandergefügt, sodass ein omnidirektionales Gesamtbild entsteht. Die Anzahl der dabei zu benutzenden Kameras ist abhängig von der Brennweite der eingesetzten Objektive. Je geringer diese ist, desto größer ist der Blickwinkel und desto weniger Kameras müssen eingesetzt werden.
Rotierende Kameras
Der Einsatz rotierender Kameras ist eine weitere Methode, omnidirektionale Bilder mithilfe gebräuchlicher Kameras zu erzeugen. Statt vieler Objektive in einem Verbund wird nur eine einzige Kamera verwendet, welche um eine hinter ihr befindliche vertikale Achse kreist. Mit dieser Anordnung ist es außerdem möglich, dreidimensionale Bilder zu erzeugen und die höheren Kosten mosaikbasierter Systeme etwas zu verringern.
Kameras mit speziellen Weitwinkellinsen (Fisheye-Linsen)
Eine weitere Möglichkeit, Panoramen aufzunehmen, ist die des Einsatzes extremer Weitwinkelobjektive. Man orientiert sich dabei an der Natur, in der viele Tiere über sehr große Sichtbereiche verfügen. Dies ist auch ein Grund, weshalb derartige Objektive oft als „Fisheye“-Objektive bezeichnet werden. Um nicht nur Panoramen, sondern die volle Sphäre aufzuzeichnen, müssen zwei dieser Kameras mit dem Rücken zueinander befestigt werden.
Omnidirektionale Aufnahmen
 Omnidirektionale Aufnahme eines Flurs
Omnidirektionale Aufnahme eines FlursDas Bild einer Omnidirektionalen Kamera ist rund mit einem „schwarzen Fleck“ in der Mitte. Dieser ungenutzte Bereich in der Bildmitte resultiert daraus, dass das Gebiet direkt über der Kamera aufgrund der Spiegelkonstruktion nicht einsehbar ist. Das Bild zeigt die Umgebung der Kamera in stark verzerrter Form. Im Regelfall zeigen die äußeren Bildbereiche die tief gelegene Umgebung, die innengelegen Bereiche die höher gelegene Umgebung. Abhängig von Kameraausrichtung, Spiegelzahl, und Spiegelform kann die omnidirekionale Aufnahme auch umgekehrt aufgebaut sein. Das heißt, innere Bildbereiche liegen tief, äußere hoch.
Verwendung
 Mobiler Roboter mit einfacher omnidirektionaler Kamera mit einem kegligen Spiegel (oben)
Mobiler Roboter mit einfacher omnidirektionaler Kamera mit einem kegligen Spiegel (oben)Ihre Ursprünge haben omnidirektionale Kameras in der Militärtechnik, und werden heute neben der vereinzelten Anwendung in der Überwachungstechnik vor allem in mobilen Robotern wie Servicerobotern verwendet.
Literatur
- E. Hecht: Optik, Oldenbourg Wissenschaftsverlag, 4. überarbeitete Auflage, München, 2005.
Weblinks



Wikimedia Foundation.