- Robocup
-
Roboterfußball ist die Umsetzung des bekannten Mannschaftsspieles Fußball für mobile intelligente Roboter.
Bedeutende internationale Wettkämpfe im Roboterfußball sind der RoboCup sowie die von der Federation of International Robot-Soccer Association (FIRA) ausgerichtete Weltmeisterschaft. RoboCup hat als langfristiges Ziel gesetzt, im Jahr 2050 den menschlichen Weltmeister in einem gewöhnlichen Fußball-Spiel zu schlagen.
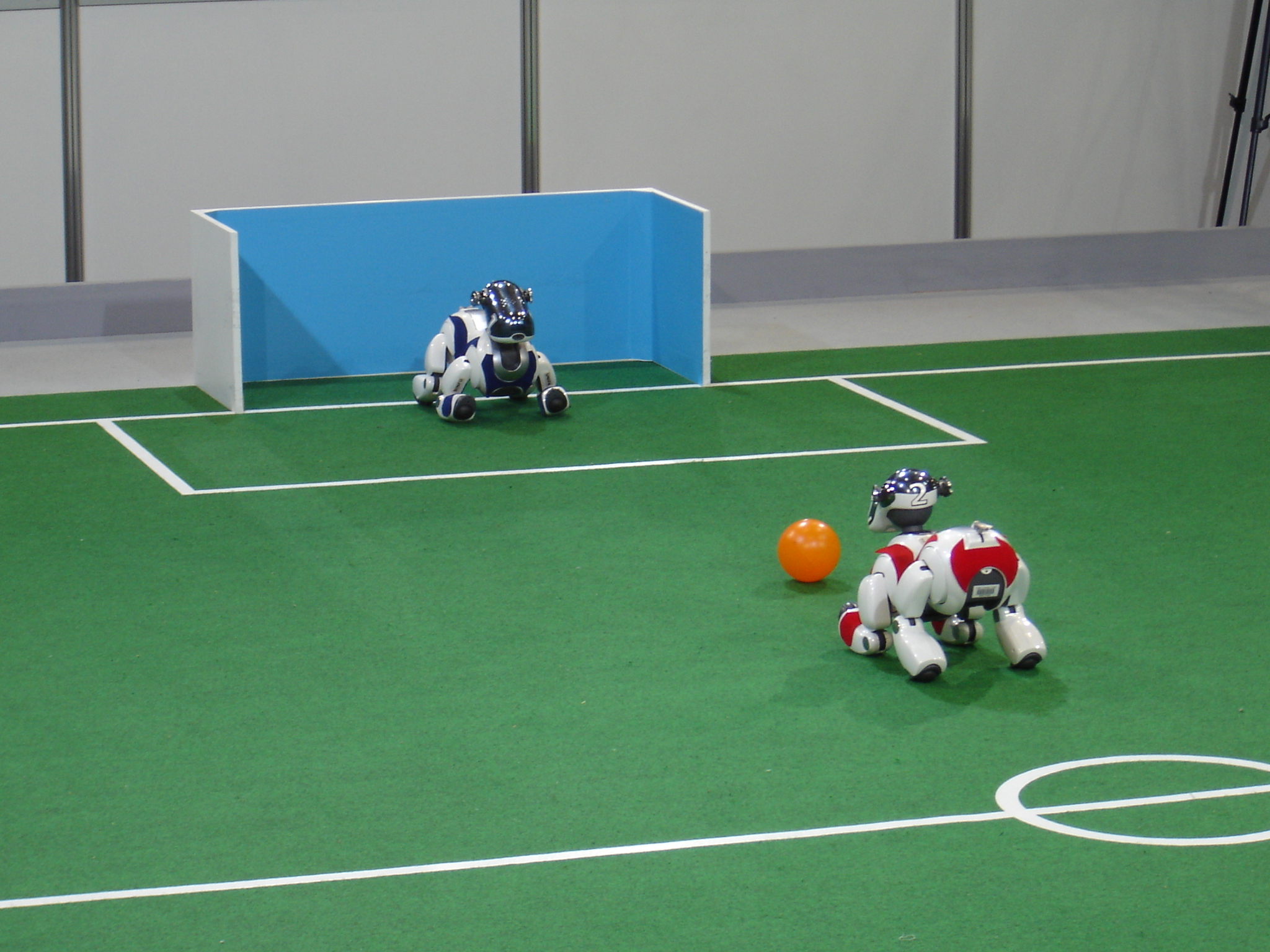
 Aibos beim RoboCup 2005
Aibos beim RoboCup 2005Inhaltsverzeichnis
Standardproblem der Künstlichen Intelligenz
Der amerikanische Mathematiker und Computerwissenschaftler Claude E. Shannon schlug 1950 vor, einen Automaten zu programmieren, der einen Menschen im Schach schlagen kann (Programming a Computer for Playing Chess; Philosophical Magazine). Allerdings hatte Konrad Zuse schon mehrere Jahre zuvor (1942-45) das welterste Schachprogramm geschrieben, in der von ihm selbst entwickelten ersten höheren Programmiersprache Plankalkül.
Diese Idee beschäftigte in den Folgejahren Wissenschaftler auf der ganzen Welt. In der Künstlichen Intelligenz entstand die Spieltheorie mit leistungsfähigen Lernstrategien und Suchverfahren. Mit dem Sieg von Deep Blue, einem von IBM entwickelten Supercomputer, gegen den amtierenden Schachweltmeister Garri Kasparow 1996 erreichte Computerschach als Forschungsgebiet der Künstlichen Intelligenz seinen Höhepunkt.
Allerdings waren sich die KI-Forscher bereits einig, dass Computerschach keinen wirklichen Prüfstein für die Leistungen maschineller Intelligenz darstellte, auch wenn es die Entwicklungen auf dem Gebiet der Künstlichen Intelligenz jahrelang beflügelt hatte.
Die Herangehensweise des Computers an das Schachspiel (riesigen Rechenaufwand in riesigen Datenbanken) entspricht keineswegs der menschlichen Herangehensweise an das Schachspiel und ist damit nicht mit wirklicher (menschlicher) Intelligenz vergleichbar. Die deterministische Natur des Schachspiels, durch die man, zumindest theoretisch, jeden Zug vorausberechnen kann, erfordert keine wirkliche Intelligenz. Heutzutage wird vielmehr Go als ein besserer Prüfstein angesehen.
So kam 1995 das Fußballspiel als Standardproblem für die Künstliche Intelligenz auf die Tagesordnung, um die neuesten Entwicklungstendenzen der Künstlichen Intelligenz zu berücksichtigen, bei der die Robotik mehr in den Mittelpunkt rückte. Da man erkannt hatte, dass Intelligenz einen Körper und Wahrnehmung benötigt, sollten autonome Roboter gegeneinander antreten.
Das „Problem“ Fußballspiel verlangt das Agieren in einer realen Umgebung, wobei ganz andere Aspekte der Intelligenz als beim Computerschach in den Vordergrund treten. Ein Fußballroboter muss sich in einer dynamischen Welt zurechtfinden, in Echtzeit auf Basis unvollständiger Informationen agieren und auf unvorhergesehene Ereignisse reagieren.
Durch „natürliche Auslese“ im Rahmen von Fußballturnieren sollen sich die erfolgreichsten Lösungsansätze der Künstlichen Intelligenz durchsetzen.
Roboterfußball verlangt:
- Planen
- Lernen
- Sensorik (Objekterkennung)
- Motorik (Ball schießen; Fortbewegung)
- Reaktives Verhalten
- Schwarmkoordination (Kollektive Intelligenz, Schwarmverhalten)
- Selbstlokalisierung (Bestimmung der eigenen Position) und Lokalisierung der anderen Spieler
- Pfadplanung (Planen eines Weges zu einer bestimmten Zielposition)
Es ist das Ziel der Initiatoren des RoboCup bis zum Jahr 2050 den amtierenden Fußball-Weltmeister zu besiegen. Diese Zeitspanne entspricht in etwa der zwischen der Aufgabenstellung des Computerschach und dem Sieg von Deep Blue gegen Garri Kasparow.
RoboCup
Die RoboCup-Weltmeisterschaften werden jährlich an wechselnden Orten ausgetragen. In Jahren in denen eine FIFA-Fußballweltmeisterschaft stattfindet, findet dabei der RoboCup im Gastgeberland der Weltmeisterschaft statt.
Dabei treffen sich ca. 2000 Wissenschaftler und Studenten aus der ganzen Welt, um ihre Teams gegeneinander antreten zu lassen. Während der Wettkämpfe findet parallel ein Kongress statt, bei dem neue wissenschaftliche Erkenntnisse aus dem Bereich Künstliche Intelligenz und Robotik ausgetauscht werden.
2006 fand die Weltmeisterschaft parallel zur Fußballweltmeisterschaft in Deutschland statt. Im Jahr 2009 werden sich in Graz (Österreich) die Teams das nächste Mal gegenüberstehen.
Ligen
- 2D Simulation
- Zwei Teams mit je 11 komplett autonomen Spielern/Programmen treten gegeneinander an. Dies geschieht rein virtuell auf einem speziellen SoccerServer, wobei die Teams noch von einem ebenfalls autonomen Coach unterstützt werden können. Sowohl Blickwinkel als auch eine simple Physik werden simuliert. Aufgrund der mechanischen Probleme und den äußeren Einflüssen, mit denen die Robotik noch zu kämpfen hat, werden hier die Methoden der KI am stärksten eingesetzt.
- 3D Simulation
- Recht neu ist der so genannte 3D-Server, der mit einer komplexen Physik-Engine aufwartet. Diese erlaubt es den Ball in drei Dimensionen zu bewegen, so dass realistischere Spielzüge möglich sind als es bei der 2D Simulation der Fall ist. Eine Betaversion des Servers wurde Anfang 2004 eingeführt. Der erste offizielle Wettkampf fand 2004 in Lissabon statt.
- Small Size
- Zwei Teams treten mit jeweils fünf kleinen Robotern gegeneinander an. Die Roboter werden per Funk von einem Rechner gesteuert, der das Spielgeschehen anhand von Kameras wahrnimmt, die vier Meter über dem Spielfeld montiert sind. Aufgrund des häufig verwendeten omnidirektionalen Antriebes und der zentralen Steuerung durch einen oder mehrere externe Computer ist hier das dynamischste Spiel zu beobachten.
- Mid Size
- Die Roboter in dieser Liga sind gegenüber der Small Size autonom und verfügen über eigene Sensoren, wie zum Beispiel eine omnidirektionale Kamera. Da die Regeln, die den Aufbau des Spielfeldes betreffen, sich ständig ändern, hatten die Roboter früher häufig Schwierigkeiten sich auf dem Feld zu lokalisieren. Daher war diese so genannte Königsdisziplin lange Zeit eher träge. Durch den Einsatz omnidirektionaler Kameras haben die meisten Teams dieses Problem inzwischen gemeistert. Die Roboter fahren inzwischen oft mit mehr als zwei Metern pro Sekunde.
- Four Legged / Standard Platform League
- In dieser Liga werden anstelle von selbstgebauten Robotern die so genannten Aibos benutzt. Diese Roboterhunde der Marke Sony verfügen über zahlreiche Sensoren und sind aufgrund ihrer eher putzigen Art ein Publikumsmagnet. Obwohl diese Roboter autonom agieren, ist es ihnen erlaubt, per WLAN miteinander zu kommunizieren.
- Da Sony die Produktion der Aibos Ende März 2006 eingestellt hat[1], wird ab dem RoboCup 2008 mit dem Aldebaran Nao gespielt. Gleichzeitig wurde die Liga in "Standard Platform League" umbenannt.
- Humanoid
 Weltweit erstes Demonstrationsspiel in der Humanoid League bei den RoboCup German Open 2005.
Weltweit erstes Demonstrationsspiel in der Humanoid League bei den RoboCup German Open 2005.- In der Humanoiden Liga treten Roboter mit menschenähnlicher Körperform und entsprechender sensorischer Ausstattung gegeneinander an. Die Roboter müssen vollständig autonom sein. Die Wettbewerbe werden in zwei Größenklassen ausgetragen: KidSize (<60 cm) und TeenSize (65–130 cm). Es finden Elfmeterschießen, Fußballspiele und jährlich wechselnde technische Wettbewerbe statt. Zu den untersuchten Forschungsfragen gehört das dynamische Laufen auf zwei Beinen, die Ballmanipulation, die visuelle Wahrnehmung der Spielsituation und die Koordination des Mannschaftsspiels.
- Rescue
- Diese Liga befasst sich nicht wie die anderen mit Fußball, sondern dient der Erforschung von Methoden, die während Katastrophen eingesetzt werden können. In der Simulationsliga wird die Koordination von Rettungseinheiten in einer verwüsteten Stadt geprobt, während Roboter in konstruierten verwüsteten Räumen eigenständig nach Überlebenden suchen sollen.
- @Home
- Diese 2006 erstmals stattfindende Liga befasst sich mit der Entwicklung zukünftiger Anwendungen autonomer mobiler Roboter im täglichen Leben. Als Szenario dient das Modell einer Wohnung bestehend aus Wohnzimmer und Küche, in welchem die Roboter unterschiedliche Aufgaben erfüllen müssen. Das Thema Mensch-Maschine-Interaktion steht hierbei im Vordergrund.
- Junior
- Die Junior League richtet sich an Schülerinnen und Schüler bis einschließlich 20 Jahren und möchte bereits Jugendliche für das Thema Robotik und Informatik begeistern. In den drei Unterligen Dance, Rescue und Soccer gibt es jeweils zwei Altersgruppen: Kinder bis 15 Jahre und ältere.
- In der Dance League lassen die Schüler Roboter (manchmal auch zusammen mit deren Erbauern) zu einer Musik auftreten und tanzen. Eine Jury bewertet die Ergebnisse beispielsweise nach der Kreativität.
- Bei der Rescue League müssen die Roboter einer Linie folgen und Papiermännchen auf dem Weg erkennen. Erschwert wird dies durch Rampen, Lücken und Hindernisse auf und neben der Linie.
- Schließlich gibt es noch die Soccer League, bei der in der einen Klasse zwei Roboter (maximal 18 cm Durchmesser; 22 cm Höhe) auf einem vom schwarz nach weiß skalierten Spielfeld autonom gegeneinander antreten (1 vs. 1). In der anderen Klasse besteht ein Team aus zwei Robotern (22 cm Durchmesser und Höhe), das Spielfeld ist entsprechend größer (2 vs.2). Gespielt wird mit einem etwa Tennisball großen Ball, der zur leichteren Erkennung Infrarotlicht aussendet.
Austragungsorte
Jahr Land Ort 1997 Japan Nagoya 1998 Frankreich Paris 1999 Schweden Stockholm 2000 Australien Melbourne 2001 USA Seattle 2002 Japan Fukuoka 2003 Italien Padua 2004 Portugal Lissabon 2005 Japan Osaka 2006 Deutschland Bremen 2007 USA Atlanta 2008 China Suzhou 2009 Österreich Graz 2010 Singapur Singapur 2011 Türkei Istanbul RoboCup 2004
Der RoboCup 2004 fand vom 27. Juni bis 5. Juli in Lissabon statt. Es gab erstmals Wettkämpfe in der Klasse „3D-Simulation“.
Besonders erfolgreich waren Deutschland und Japan, allerdings auch aufgrund der vielen Teams, die aus diesen Ländern antraten:
Klasse Top-Teams 2D Simulation - Step (Sankt Petersburg)
- Brainstormers (Osnabrück)
3D Simulation Small Size - FU-Fighters (Berlin)
- Roboroos (Queensland)
Mid Size Four legged - German Team (Deutschland)
- UTS Unleashed (Sydney)
Humanoid Rescue Real Robots - Toin Pelikn (Japan)
- Kurt3D (Sankt Augustin)
- Alcor (Italien)
Rescue Simulation - ResQ Freiburg (Freiburg im Breisgau)
- DAMAS (Kanada)
- Caspian (Iran)
Die Highlights dieses Wettkampfes waren der erste von einem Roboter gehaltene Elfmeter (durch Vision im Finale der Humanoiden) und das rasante Spiel der Aibos des German Team, die mit 5:3 (2:2) gegen die Mannschaft der Universität Sydney gewannen. Auch das Japanische Eigen Team erregte durch sein präzises Spiel in den Wettkämpfen der Mid Size Klasse Aufmerksamkeit und konnte das Finale mit 5:1 klar für sich entscheiden.
RoboCup 2005
Der RoboCup 2005 fand vom 13.–19. Juli in Osaka statt. Es wurden erstmals echte Spiele mit humanoiden Robotern ausgetragen.
Klasse Top-Teams 2D Simulation 3D Simulation Small Size - FU-Fighters (Berlin)
- Cornell Big Red (USA)
- Field Rangers (Singapur)
Mid Size - Eigen (Japan)
- FU-Fighters (Berlin)
- Philips (Niederlande)
Four legged - German Team (Deutschland)
- NUBots (Australien)
- rUNSWift (New South Wales)
Humanoid - Team Osaka (Ōsaka)
- NimbRo (Freiburg im Breisgau)
- Team Hajime (Japan)
Rescue Real Robots - Toin Pelican (Japan)
- ROSCUE (Korea)
- Casualty (Australien)
Rescue Simulation RoboCup 2006
Der RoboCup 2006 fand vom 14.–20. Juni in Bremen statt. Die Finalspiele waren am 18. Juni. Die beiden Folgetage wurden für das zum RoboCup gehörende Symposium genutzt und waren nicht für die Öffentlichkeit zugänglich. Das Symposium dient dem wissenschaftlichen Austausch innerhalb der RoboCup-Gemeinde.
Klasse Top-Teams 2D Simulation 3D Simulation Small Size Mid Size Four legged - NUBots (Australien)
- rUNSWift (New South Wales)
- Microsoft Hellhounds (Dortmund)
Humanoid - Team Osaka (Ōsaka)
- NimbRo (Freiburg im Breisgau)
Rescue Real Robots Rescue Simulation RoboCup 2007
Der RoboCup 2007 fand vom 1.-13. Juli in Atlanta statt.
Klasse Top-Teams Small Size RoboCup 2008
Der RoboCup 2008 fand vom 14.7. - 20.7. in Suzhou statt. Zwischenzeitliche organisatorische Probleme konnten gelöst werden. Die Visumvergabe war Berichten zu Folge allerdings erschwert[2].
Klasse Top-Teams Small Size RoboCup 2009
Der RoboCup 2009 findet vom 29.6. - 5.7. in Graz statt.
RoboCup 2010
Der RoboCup 2010 findet in Singapur statt.
RoboCup 2011
Der RoboCup 2011 findet in Istanbul statt.
German Open
Hauptartikel siehe: RoboCup German Open
Die German Open ist ein jährlich in Deutschland stattfindender Wettbewerb.
Dutch Open
Da 2006 die Weltmeisterschaften in Deutschland stattfanden, gab es in diesem Jahr keine German Open. Als Ersatz fanden in Eindhoven in den Niederlanden im Rahmen der RoboLudens (der spielende Roboter) vom 7. bis zum 9. April die Dutch Open statt.
Klasse Top-Teams Sony Four Legged - Microsoft Hellhounds (Dortmund, Deutschland)
- Aibo Team Humboldt (Berlin, Deutschland)
- Darmstadt Dribbling Dackels (Darmstadt, Deutschland)
Japan Open
Hauptartikel siehe: Japan Open
Brazil Open
Hauptartikel siehe: Brazil Open
Federation of International Robot-Soccer Association (FIRA)
Die Federation of International Robot-Soccer Association (FIRA) wurde am 5. Juni 1997 in Daejeon (Korea) gegründet. Sie veranstaltet jährlich Roboterfußballweltmeisterschaften (FIRA RoboWorld Cup) sowie lokale Meisterschaften (European Championships, ChinaCup, KoreaCup, South America Cup etc.).
Weltmeisterschaft
Die FIRA-Roboterfußballweltmeisterschaften werden jährlich an wechselnden Orten ausgetragen, begleitet von einem wissenschaftlichen Kongress (FIRA RoboWorld Congress). 2006 fand die Weltmeisterschaft parallel zur Fußballweltmeisterschaft in Dortmund statt. Die WM 2007 wurde in San Francisco ausgetragen, parallel zur dort jährlich ausgetragenen Veranstaltung „Robolympics“. Die WM 2008 ist dann – zeitparallel zu den Olympischen Sommerspielen – in Qingdao/China.
Austragungsorte der Weltmeisterschaft
Jahr Land Ort Ergebnisse 1996 Südkorea Daejeon Ergebnisse 1997 Südkorea Daejeon Ergebnisse 1998 Frankreich Paris Ergebnisse 1999 Brasilien Campinas Ergebnisse 2000 Australien Rockhampton Ergebnisse 2001 China Peking Ergebnisse 2002 Südkorea Busan, Daegu, Daejeon, Gwangju, Suwon, Seoul Ergebnisse 2003 Österreich Wien Ergebnisse 2004 Südkorea Busan Ergebnisse 2005 Singapur Singapur Ergebnisse 2006 Deutschland Dortmund Ergebnisse 2007 USA San Francisco Ergebnisse 2008 China Qingdao — Spielklassen in der FIRA
- MiroSot
- Die Roboter sind Würfel mit maximal 7,5 cm Kantenlänge, zwei oder auch vier Rädern, zwei Elektromotoren und ein Radioempfänger inklusive Antenne ausgestattet. Als Ball dient ein orangefarbener Golfball. Eine Kamera, über dem Spielfeld montiert, übermittelt die aktuelle Spielsituation an einen Host-Computer. Dieser wiederum steuert die Roboter mittels Funksignalen.
- Je nach Unterklasse wird mit 5 (MiroSot Middle League) oder 11 (MiroSot Large League) Robotern pro Team gespielt. Die entsprechenden Spielfeldgrößen sind 220 × 180 cm bzw. 400 × 280 cm.
- NaroSot
- Die Roboter sind 4 × 4 × 5.5 cm groß. Als Ball dient ein orangefarbener Tischtennisball. Der Spielaufbau (zentrale Kamera, externer Host-Computer, Funkübertragung) ist gleich der MiroSot-Klasse.
- Das Spielfeld hat eine Größe von 130 × 90 cm.
- RoboSot
- Die Roboter sind maximal 20 × 20 cm groß (keine Höhenbeschränkung). Ein Team kann aus einem bis drei Robotern bestehen. Die Roboter können vollständig oder teilweise autonom arbeiten (für die Verarbeitung der Bildinformationen kann ein zusätzlicher Host-Computer verwendet werden). Als Ball dient ein gelber Tennisball.
- Das Spielfeld hat eine Größe von 220 × 180 cm.
- KheperaSot
- Die Roboter dürfen maximal einen Durchmesser von 6 cm haben und sind vom Typ Khepera. Sie müssen vollständig autonom agieren. Es spielt einer gegen einen. Als Ball dient ein weißer oder gelber Tennisball.
- Das Spielfeld ist 105 × 68 cm groß.
- HuroSot
- Die Roboter müssen sich auf zwei Beinen fortbewegen und sind in drei Klassen aufgeteilt:
- Small (max. 50 cm Hoch, 5 Roboter pro Team),
- Medium (max. 80 cm, 3 Roboter pro Team),
- Large (max. 150 cm, 3 Roboter pro Team).
- Für die Small-League wird ein gelber Tennisball verwendet, für Medium und Large ein orangener Jugendfußball (Größe 3).
- Die Größe des Spielfeldes ist je nach Klasse zwischen 340 × 250 cm und 430 × 350 cm groß.
- Neben dem eigentlichen Wettbewerb (Fußball) gibt es noch vier weitere Aufgaben (Vorwärts-/Rückwärtslaufen, Freistoß, Hindernislauf, Aufheben und Tragen).
- SimuroSot
- Simulationsliga. Es gibt zwei Unterklassen mit 5 bzw. 11 Roboter pro Team
- siehe auch: MiroSot Middle Leage und MiroSot Large League.
Einzelnachweise
Weblinks
- RoboCup
- Federation of International Robot-soccer Association (FIRA)
- Links zum Thema RoboCup Teams im Open Directory Project
- Podcast zur Euroby 2008 mit Prof. Peter Kopacek von der TU Wien
- Podcast des Chaosradio Express zum Thema Roboterfußball
- Offizielle Seite der Small Size League (SSL, F180)
Wikimedia Foundation.