- Quadrocopter
-
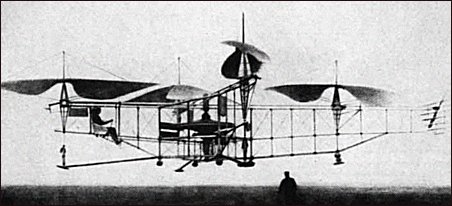
 „Flug-Jeep“ Curtiss-Wright VZ-7AP
„Flug-Jeep“ Curtiss-Wright VZ-7AP
Ein Quadrocopter (von lateinisch quadrum, Viereck), auch Quadricopter, Quadrotor oder Schwebeplattform, ist ein Luftfahrzeug, das vier in einer Ebene angeordnete, senkrecht nach unten wirkende Rotoren oder Propeller benutzt, um Auftrieb und durch Neigung der Rotorebene auch Vortrieb zu erzeugen. Es gehört zu den Hubschraubern und kann wie diese oder auch wie VTOL-Flugzeuge senkrecht starten und landen.
Inhaltsverzeichnis
Technik
Mechanische Stabilisierung durch Drehmomentausgleich
Der Vorteil dieser Bauweise liegt darin, dass alle drei Achsen allein durch Variation von Schub und damit Drehmoment der vier Propeller angesteuert werden können, wenn die Drehrichtungen geeignet angeordnet sind. Aufwändige Taumelscheiben wie bei einem Hubschrauber oder andere Aktuatoren sind damit nicht notwendig. Auch entsteht keine Drift wie bei der Heckrotor-Konfiguration und bei der Steuerung treten kaum asymmetrische Artefakte aus Kreisel-Effekten des Rotors auf.
Dabei spielt es keine Rolle, ob der Schub durch Drehzahlunterschiede oder durch Pitch, also Veränderung des Anstellwinkels des jeweiligen Propellers, geregelt wird. Die Schubänderung muss nur schnell genug reagieren, bei Drehzahlsteuerung etwa durch stufenlose Getriebe oder Elektromotoren.
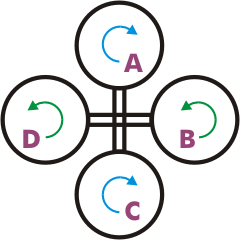
 Antriebsschema eines Quadrocopter
Antriebsschema eines QuadrocopterAnhand der Grafik wird das Zusammenwirken der Rotoren deutlich (A in Flugrichtung):
- Kippen nach vorn/hinten um die Querachse, das heißt Beschleunigen/Bremsen (Nick):
-
- Schubverhältnis zwischen A und C verschieben.
- Kippen um die Längsachse, seitliche Bewegung (Roll):
-
- Schubverhältnis zwischen B und D verschieben.
- Drehen um die Hochachse (Gier oder Yaw):
-
- Schubverhältnis paarweise zwischen A-C und B-D verschieben.
Durch Mischung der Steuerbefehle kann jeder Schubvektor im Raum erreicht werden.
Die hier gezeigte +-Konfiguration ist weit verbreitet und bedeutet eine einfache Ansteuerung, indem für Roll- und Nickachse jeweils ein Motorenpaar angesteuert wird.
Bei der H- oder auch x-Konfiguration sind die Rotoren um 45° zur Flugrichtung versetzt. Hier sind bei Nick oder Roll stets alle vier Motoren zu regeln, was wiederum höhere Drehbeschleunigungen erlaubt; zudem ist bei Filmaufnahmen die Flugrichtung nicht durch einen Propeller verdeckt.Neben der verbreiteten Konfiguration mit vier existieren auch Konstruktionen mit sechs, acht oder zwölf Rotoren, wobei teils der Ausfall eines Antriebs automatisch erkannt und ausgeregelt wird (Redundanz). Der Tricopter wiederum spart Gewicht und Bauteile durch Beschränkung auf drei Rotoren, wobei die Gierachse z.B. durch Schwenken eines Rotors via Servo gesteuert wird.
Bei den Flugleistungen reichen die bekannten Quadrocopter nicht an vergleichbar motorisierte Hubschrauber heran, sind aber meist auch nicht auf hohe Geschwindigkeit ausgelegt (Ausnahmen sind Wandelflugzeuge in dieser Bauweise). Bei der Konzentration der Massen im Zentrum und durch den schnell veränderlichen Schubvektor sind aber grundsätzlich hohe Beschleunigungen möglich.
Elektrische Stabilisierung durch Gyroskope
 Ferngesteuerter Modell-Quadrocopter, mittig das mechanische Gyroskop zur Stabilisierung.
Ferngesteuerter Modell-Quadrocopter, mittig das mechanische Gyroskop zur Stabilisierung.Grundlage für die Weiterentwicklung der Modell- und UAV-Quadrocopter sind Fortschritte in der Elektronik und Sensorik, die auf dem Markt ab etwa 2000 verfügbar waren und ab 2004 in Serienmodellen erschienen: Durch Gyroskope können Kippmomente – die höher und plötzlicher auftreten als bei Hubschraubern, da der Schwerpunkt meist in der Rotorebene liegt – automatisch ausgeregelt werden. Dabei kommen Gyroskopsensoren auf Piezo-Basis oder MEMS (Micro-Electro-Mechanical Systems) zur Messung der Winkelgeschwindigkeit zum Einsatz, oft auch ergänzt durch Beschleunigungssensoren, die mit Hilfe einer Sensordatenfusion mit den Gyroskopen direkt den Neigungswinkel zur Vertikalen ermitteln. Andere Bauweisen benutzen einen mechanischen Kreisel, dessen Abweichungen zur vertikalen Ausgangslage etwa über Hall-Sensoren aufgenommen werden (vgl. Inertiales Navigationssystem).
Weiterhin hat die Verfügbarkeit von kleinen, leistungsfähigen Mikrocontrollern sowie Brushless-Motoren und Lithium-Polymer-Akkus mit deutlich besserem Leistungsgewicht als die Vorgänger-Technologie die Entwicklung gefördert und ermöglicht Flugzeiten bis zu 30 Minuten mit elektrischem Antrieb.
Eine Änderung des Winkels um die jeweilige Gyro-Achse herum, gibt dem Mikrocontroller die nötige Information wie stark nachgesteuert werden muss, um die gewünschte Fluglage zu halten oder in die Waagerechte zu bringen. Dabei übernimmt der Mikrocontroller auch die Drehzahlsteuerung der Brushless-Motoren. Teils ermöglichen GPS-Sensoren auch eine exakte Positionierung über Grund.
Da außer den Motoren keine mechanischen Teile wie Servomotoren, Gestänge und Rotorköpfe notwendig sind, ist diese Bauweise einfacher zu realisieren und zu reparieren als ein Hubschrauber.
Anzahl der Rotoren
Basierend auf dem Konzept der Quadrocopter gibt es mittlerweile eine Vielzahl an Varianten mit z.B. sechs, acht oder noch mehr Rotoren, die dann auch als Hexacopter, Octocopter, oder noch allgemeiner als Multicopter bezeichnet werden.
Entwicklung
 Oehmichen No.2 1922
Oehmichen No.2 1922Zu Beginn der Entwicklung von Hubschraubern wurden häufig eine Vielzahl von Rotoren eingesetzt, da man sich etwa eine Steuerung mittels Taumelscheibe noch nicht praktisch vorstellen konnte. Der französische Luftfahrtpionier Étienne Oehmichen hatte schon seit 1920 mit Drehflügeln experimentiert, bevor sich am 11. November 1922 erstmals sein Oehmichen No. 2 in die Luft hob. Bei diesem frühen Quadrocopter waren die vier Rotoren elastisch und ihr Anstellwinkel konnte durch Verschränkung über Seilzüge verändert werden. Daneben wurden weitere acht waagerecht wirkende Propeller für Stabilisierung und Vortrieb eingesetzt, da die Rotoren noch nicht präzise genug steuerbar waren. Das Oehmichen No. 2 war wohl der erste zuverlässige Senkrechtstarter, absolvierte mehr als 1.000 Flüge und erreichte am 4. Mai 1924 Rekorde mit einer Flugzeit von 14 Minuten und einem Kilometer Kreisflug.
Mit der Entwicklung von Taumelscheibe und Heckrotor-, Tandem- oder Koaxial-Bauweise verschwand die Quadrocopter-Bauweise aus dem Blickfeld der Entwickler. Erst mit dem allgemeinen Interesse für VTOL-Fahrzeuge in den 1950er Jahren flogen wieder neue Quadrocopter:
- Convertawings A von 1956, für die US-Armee, mit Gitterrohrrahmen, zwei Motoren und Riemenantrieb.
- Der technisch bewusst einfach aufgebaute "Flug-Jeep" Curtiss-Wright VZ-7AP von 1958.
- Der für schnellen Personentransport vorgesehene Curtiss-Wright X-19 mit Schwenkrotoren (1963).
- Das in Deutschland ab 1963 entwickelte Transportflugzeug VC 400, das jedoch nicht über das Planungsstadium hinauskam.
- Das experimentelle Schwenkrotor-Flugzeug Bell X-22 (1966).
- Die einsitzige Aerotechnik WGM 21, die 1969 in Deutschland als Prototyp flog.
Im Oktober 2011 stellte die Startup-Firma e-volo einen personentragenden, elektrisch angetriebenen Multicopter mit 16 Rotoren vor.[1]
Einsatz

Aktuell werden keine personentragenden Quadrocopter mehr eingesetzt. Die Bauweise tritt aber häufiger bei Drohnen oder UAVs sowie bei Modellhubschraubern auf.
Verbreitete Anwendung findet der Quadrocopter in der Luftbildfotografie und -Videografie. Neben den kommerziell angebotenen Geräten mit Fernbetrieb entstehen auch vermehrt Privatprojekte und Eigenentwicklungen. Eine weitere Anwendung neben der Luftbildfotografie ist das Spaß- und Kunstfliegen. Fluggeräte hierfür basieren auf den gleichen Grundkomponenten, sind aber in Masse und Leistung anders konfiguriert.
Auch beschäftigen sich verschiedene Hochschulen mit dem Konzept, um robuste und kostengünstige Versuchsobjekte zur Verfügung zu haben, etwa für die Forschung im Bereich des Schwarmverhaltens.
Der französische Hersteller Parrot bietet für den Freizeit- und Spaßbereich Quadrocopter an, die sich über eine W-LAN-Schnittstelle steuern lassen.[2] Dieses für rund 300 Euro erhältliche, als Spielzeug für Erwachsene einzustufende Fluggerät trägt zwei Onboard-Kameras, wobei man zwischen der Front- und Bodenkamera hin- und herschalten kann. Die Bilder werden live auf einen stationären Monitor übertragen. Im Dezember 2010 griff die Bundesverbraucherministerin Ilse Aigner das Thema Datenschutz bei Bildübertragung durch Drohnen auf. Sie vertrat die Auffassung, dass private Betreiber "rechtlich schnell an Grenzen stoßen" würden. Ein Sprecher des Bundesdatenschutzbeauftragten erklärte, dass der Einsatz eine rechtliche Grauzone darstelle.[3]
Weblinks
 Commons: Quadrocopter – Sammlung von Bildern, Videos und Audiodateien
Commons: Quadrocopter – Sammlung von Bildern, Videos und AudiodateienLiteratur
- Roland Büchi: Faszination Quadrokopter. 1. Auflage. Verlag für Technik und Handwerk, vth, 2010, ISBN 978-3881807913.
- Roland Büchi: Fascination Quadrocopter, English Version. 1. Auflage. 2011, ISBN 978-3842367319.
Einzelnachweise
- ↑ Website von e-volo
- ↑ Spehr, Michael: Mini-Drohne für Hobby-Spione. 17. Oktober 2010, abgerufen am 5. November 2011: „Der Quadrocopter von Parrot ist eine Mini-Drohne. Er hat eine Wlan-Schnittstelle und zwei Kameras. Mit einem iPhone oder iPod lässt sich der Quadrocopter fernsteuern. Und Vorsicht: Bitte nur mit viel freiem Platz im Keller oder draußen ausprobieren!“
- ↑ Heise-Meldung vom 26. Dezember 2010



Wikimedia Foundation.