- Stromverdrängungsläufer
-
Der Stromverdrängungsläufer ist eine Sonderbauform des Käfigläufers, er wird in Drehstromasynchronmotoren eingebaut. Durch ihre spezielle Bauweise haben Drehstrommotoren mit Stromverdrängungsläufer bessere Anlaufeigenschaften als andere Kurzschlussläufermotoren.
Inhaltsverzeichnis
Grundlagen
Beim Anlauf eines Drehstromasynchronmotors sollten der Anlaufstrom niedrig, jedoch das Anlaufmoment hoch sein. Damit der Anlaufstrom niedrig ist, muss der Wirkwiderstand des Läufers groß sein. Ein großes Anlaufdrehmoment erreicht man, wenn die Phasenverschiebung zwischen Läuferstrom und Läuferspannung gering ist. Um das zu erreichen, muss der Rotor so konstruiert sein, dass der Wirkwiderstand der Rotorwicklung sehr viel größer ist als ihr Blindwiderstand. Ein hoher Läuferwirkwiderstand hat aber nach dem Hochlaufen des Motors zur Folge, dass der Schlupf sich vergrößert. Gleichzeitig verschlechtert sich dadurch der Wirkungsgrad des Motors.
Nach dem Hochlaufen verringert sich die Läuferfrequenz fL und damit auch der induktive Blindwiderstand XL gemäß der Gleichung (
 ) Somit kommt nur noch der Wirkwiderstandsanteil zum Tragen. Damit die beschriebenen Nachteile (großer Schlupf, schlechter Wirkungsgrad) nicht auftreten, muss nach dem Hochlaufen auch der Wirkwiderstand kleiner werden. Die geforderten Eigenschaften werden weder von Rundstabläufern (Kurzschlussläufer), noch von einem Widerstandsläufer erbracht.
) Somit kommt nur noch der Wirkwiderstandsanteil zum Tragen. Damit die beschriebenen Nachteile (großer Schlupf, schlechter Wirkungsgrad) nicht auftreten, muss nach dem Hochlaufen auch der Wirkwiderstand kleiner werden. Die geforderten Eigenschaften werden weder von Rundstabläufern (Kurzschlussläufer), noch von einem Widerstandsläufer erbracht.Aufbau und Wirkungsweise
Damit ein Läufer im Anlauf einen hohen Wirkwiderstand hat, der nach dem Hochlaufen wieder klein wird, muss er eine spezielle Konstruktion haben. Die meisten Standardmotoren haben einen Doppelstabläufer. Hierzu ordnet man in den Läufernuten jeweils zwei miteinander elektrisch leitend verbundene (entweder direkt oder an den Stirnseiten) Läuferstäbe übereinander an, durch welche dann im Betrieb ein Wechselstrom fließt. Beim Anlauf hat dieser Strom, aufgrund der hohen Läuferfrequenz, ebenfalls eine hohe Frequenz.
Dieser durch das Ständerdrehfeld induzierte Läuferstrom erzeugt um jeden Läuferstab ein magnetisches Streufeld, welches sehr inhomogen ist. Die beiden Streufelder wirken im Wechselstromkreis des Läufers wie induktive Blindwiderstände und induzieren in den jeweiligen Läuferstäben elektrische Spannungen. Diese Spannungen sind gemäß der Lenzschen Regel bestrebt, die sie verursachenden Wechselströme in jedem Läuferstab zu verringern.
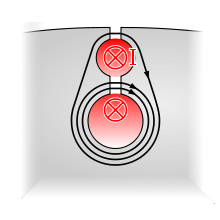 Stromverdrängung bei Doppelstabnut
Stromverdrängung bei Doppelstabnut
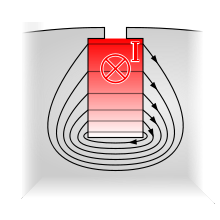 Stromverdrängung bei Hochstabnut
Stromverdrängung bei HochstabnutUm den unteren Läuferstab ist das magnetische Wechselfeld stärker, da die magnetischen Feldlinien zum Einen einen kürzeren Luftweg haben und sie sich zum Anderen im Eisenpaket schließen können. Die vom Wechselfeld induzierte Gegenspannung, somit die stromverringernde Wirkung der induzierten Spannung, ist dadurch im unteren Läuferstab größer als im oberen Läuferstab. Aufgrund der für Drehstromasynchronmaschinen typischen halbgeschlossenen Eisennut wird der Strom dadurch zur Nutöffnung, somit in Richtung Läuferaußenrand, also zum Luftspalt (Skineffekt) verdrängt.
Daher steht dem Stromverdrängungsläufer beim Anlauf fast nur der kleinere Nutquerschnitt des oberen Läuferstabes zur Verfügung. Dies hat zur Folge, dass der Stromfluss im unteren Läuferstab sehr viel geringer ist als im oberen Läuferstab. Am Außenrand des Läufers ist die magnetische Flussdichte geringer als innen. Aufgrund des inhomogenen Streufeldes ist auch der Blindwiderstand XL nicht über den gesamten Querschnitt der Läuferstäbe gleich. Er nimmt vom Läuferrand zur Läufermitte stark zu, deshalb fließt beim Anlauf des Motors der Läuferstrom fast nur im oberen Teil des Läuferstabes.
Durch die Stromdichte im Läuferstab und dem großen Nutwiderstand hat der Stromverdrängungsläufer beim Anlaufen einen großen Widerstand und der Anlaufstrom wird deshalb kleiner. Bedingt durch den großen Wirkwiderstand des Läufers kommt es zu einer geringeren Phasenverschiebung im Läuferstromkreis. Aus diesem Grund hat der Stromverdrängungsläufer ein größeres Anlaufmoment als der Rundstabläufer.
Beim Hochlaufen wird die Läuferfrequenz kleiner und der Streufluss nimmt ab; dadurch verringert sich die Stromverdrängung. Im Nennbetrieb kann der Strom wieder den ganzen Nutquerschnitt beider Läuferstäbe nutzen. Dadurch verringert sich der Wirkwiderstand des Rotors sehr stark, was einen kleineren Kippschlupf zur Folge hat. Die Rotorverluste sind nun gering, was einen guten Wirkungsgrad ergibt. Somit kann eine gute Leistungsabgabe erzielt werden. Der Motor läuft durch seine steile Kennlinie auf einer hohen Nenndrehzahl und hat nun auch einen geringeren Schlupf. Diese Wirkung lässt sich auch mit anderen Nutformen erzielen.
 Nutenformen
Nutenformen
(➀ konventionelle Rundstabnut)Es gibt folgende Nutformen:
- Hochstabnut ➁
- Keilstabnut ➂
- Doppelnut ➃
- Doppelstabnut ➄
- Tropfenstabnut ➅
außerdem eine Vielzahl von Kombinationen.
Entsprechend ihrer Nutform werden die Läufer als Keilstabläufer, Tropfenstabläufer, Hochstabläufer, Doppelnutläufer oder Hochnutläufer bezeichnet. Bei kleineren Motoren bis Achshöhe 315 werden Pressgussrotoren verwendet, welche eine relativ freie Gestaltungsmöglichkeit für die Läufer-Nutform bieten. Bei größeren Motoren (Achshöhe > 315) werden Tiefnuten oder Doppelkäfige eingesetzt, um einen ausgeglichenen Motorkennlinienverlauf zu erreichen.[1]
Durch die Form der Nuten kann die Größe der Stromverdrängung beeinflusst werden. Gleichzeitig nimmt man dadurch Einfluss auf die Größe des Läuferwiderstandes. Durch eine entsprechende Konstruktion des Rotorkäfigs lässt sich die Streuung minimieren und das Kippmoment erhöhen. Dadurch kann der Motor kurzzeitig ein Mehrfaches seines Nennmoments abgeben. Es entfällt dadurch die in bestimmten Anwendungsfällen notwendige Überdimensionierung des Motors.
Eine spezielle Bauform des Stromverdrängungsläufers ist der Doppelkäfiganker-Rotor. Hierbei werden jeweils zwei Einzelstäbe übereinander angeordnet, die voneinander galvanisch getrennt sind. Der Motor besteht somit aus zwei Käfigen, einem Außenkäfig und einem Innenkäfig. Durch entsprechende Materialwahl (Kupfer, Aluminium, Messing) und Dimensionierung der Leiterquerschnitte haben die Käfige unterschiedliche Widerstände.
Der Innenkäfig wird so konstruiert, dass er einen kleinen elektrischen Widerstand hat und der Außenkäfig erhält einen hohen elektrischen Widerstand. Durch diese Konstruktionsweise ist der Effekt noch ausgeprägter als beim einfachen Stromverdrängungsanker. Wenn der Motor anläuft, fließt der Strom fast nur im hochohmigen Außenkäfig. Dadurch wird der Anlaufstrom stark reduziert und das Anlaufmoment erhöht. Nach dem Hochlauf verteilt sich der Strom auf beide Käfige entsprechend ihrer Wirkwiderstände. Der niederohmige Innenkäfig bestimmt nun das Betriebsverhalten des Motors.
Betriebsverhalten
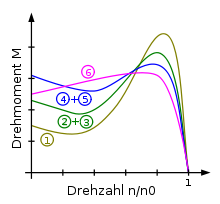 Kennlinie für Drehmoment und Drehzahl:
Kennlinie für Drehmoment und Drehzahl:
➀ Rundstabnut
➁ Hochstabnut
➂ Keilstabnut
➃ Doppelnut
➄ Doppelstabnut
➅ TropfenstabnutDie Form der Nuten hat wesentlichen Einfluss auf das Anlaufverhalten des Motors. Abhängig von der Nutform des Läufers ergeben sich unterschiedliche Hochlaufkurven des Motors. Allerdings sagt die jeweilige Läuferbezeichnung (Doppelstabläufer, Doppelnutläufer etc.) nur wenig über die genaue Form der entsprechenden Hochlaufkurve aus.[2]
Bei Drehstromasynchronmotoren mit Stromverdrängungsläufer ist das Anlaufdrehmoment circa zweimal so groß wie das Nennmoment. Durch den erhöhten Läuferwiderstand verschiebt sich das Kippmoment hin zu niedrigen Drehzahlen. Das Kippmoment ist bei Stromverdrängungsläufern etwa zwei- bis dreimal so hoch wie das Nennmoment. Der Anlaufstrom ist etwa dreimal so hoch wie der Nennstrom, deshalb müssen auch größere Motoren mit Stromverdrängungsläufer mittels besonderer Anlassverfahren angelassen werden.[3]
Durch den großen Nutquerschnitt haben Stromverdrängungsläufer eine größere Streuung als Rundstabläufer. Dadurch haben sie einen etwas schlechteren Wirkungsgrad und einen niedrigeren Leistungsfaktor als Motoren mit Rundstabläufer. Für den Betrieb mit Frequenzumrichtern sind Stromverdrängungsläufer schlechter geeignet als Rundstabläufer. Trotzdem haben Drehstromasynchronmotoren mit Stromverdrängungsläufer wesentlich bessere Anlaufeigenschaften als Motoren mit Rundstabläufer.
Vor- und Nachteile
- Vorteile
- Gute Anlaufeigenschaften
- Hohes Anzugsmoment
- Niedrigerer Anlaufstrom als Rundstabläufer
- Hohes Kippmoment
- Wartungsarm
- Nachteile
- Schlechterer Wirkungsgrad als Rundstabläufer
- Schlecht geeignet für den Betrieb mit Frequenzumrichter
- Niedriger Leistungsfaktor
Einsatzbereiche
Stromverdrängungsläufer werden in Drehstromasynchronmotoren eingesetzt, wenn über einen weiten Bereich vom Elektromotor eine konstante Leistung benötigt wird. Insbesondere im kleinen und mittleren Leistungsbereich, dort wo der Einsatz von Schleifringläufermotoren nicht sinnvoll ist, haben Drehstromasynchronmotoren mit Stromverdrängungsläufer immer einen großen Vorteil gegenüber Drehstromasynchronmotoren mit Rundstabläufer.[4]
Einsatzbeispiele
- Spanabhebende Bearbeitung
- Zentrumswickler
- Traktionsfahrzeuge
Gesetzliche Bestimmungen und sonstige Regelwerke
- EN 60 034 Teil 1 Allgemeine Bestimmungen für umlaufende elektrische Maschinen
- EN 60 034 Teil 8 Anschlussbezeichnungen und Drehsinn für elektrische Maschinen
- DIN IEC 34 Teil 7 Bauformen umlaufende elektrische Maschinen
- EN 60034-5 Schutzarten umlaufender elektrischer Maschinen
- EN 60034-6 Kühlarten, drehende elektrische Maschinen
Literatur
- A. Senner: Fachkunde Elektrotechnik. 4. Auflage. Verlag - Europa – Lehrmittel, 1965
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1 Auflage. Westermann Schulbuchverlag GmbH, Braunschweig 1998, ISBN 3-14-221730-4
- Hans Günter Boy, Horst Flachmann, Ing. grad. Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg, ISBN 3-8023-0725-9
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag - Europa - Lehrmittel, Wuppertal 1989, ISBN 3-8085-3018-9
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0
Einzelnachweise
- ↑ H. Greiner: Anlauf und elektrodynamische Auslaufbremsung bei Käfigläufermotoren. Danfoss Bauer GmbH
- ↑ Seifert, Thomas Fladerer: Elektromotor-Design für spezielle Anforderungen.
- ↑ Elektrische Antriebstechnik. Gloor Engineering, April 2008.
- ↑ Rolf Gloor: Antriebstechnik im Maschinenbau. Gloor Engineering im Auftrag des Bundesamt für Konjunkturfragen, 3003 Bern.
Siehe auch




Wikimedia Foundation.