- Torquemotor
-
Ein Torquemotor (torque (engl.) = Drehmoment) ist ein hochpoliger, elektrischer Direktantrieb aus der Gruppe der Langsamläufer. Torquemotoren weisen sehr hohe Drehmomente bei relativ kleinen Drehzahlen auf.
Inhaltsverzeichnis
Aufbau
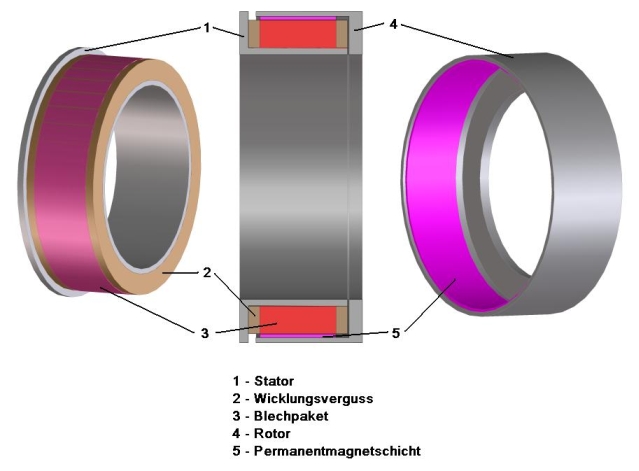
 Vereinfachter Aufbau eines Torquemotors (permanenterregter bürstenloser Gleichstrommotor in Außenläufer Bauform)
Vereinfachter Aufbau eines Torquemotors (permanenterregter bürstenloser Gleichstrommotor in Außenläufer Bauform)
Ein Torquemotor kann vereinfacht als ein auf hohe Drehmomente optimierter, großer Servomotor mit Hohlwelle betrachtet werden. Dabei sind folgende Motortechnologien verwendbar:
Da keine Begriffliche Normung besteht, wird die Bezeichnung Torque (oder auch High Torque) umgangssprachlich häufig auch für andere Formen langsamlaufender oder momentenstarker Antriebe verwendet.
Torquemotoren sind als Außenläufer (Stator innen, Rotor ("Läufer") außen) und als herkömmliche Innenläufer (Rotor innen, Stator außen) herstellbar. Außenläufer sind bei Torquemotoren verbreiteter, da bei ihnen aufgrund der unterhalb dargestellten Zusammenhänge bei gleicher Baugröße ein größeres Drehmoment zur Verfügung steht.
Sonderformen sind beispielsweise Schwenkmotoren, welche keine 360° Drehung vollführen. Als Abwandlung des Torquemotors kann der Linearmotor angesehen werden, welcher eine Abwicklung eines Torquemotors darstellt und für translatorische Antriebe genutzt wird.
Wirkungsweise
In seinem Grundprinzip entspricht der Torquemotor herkömmlichen Elektromotoren. Es gelten weitestgehend die Berechnungsgrundlagen für hochpolige Servomotoren. Das gesteigerte Drehmoment erhält der Torquemotor vor allem aus der hohen Polpaarzahl. Denn die Drehfelddrehzahl ns ergibt sich bei vorgegebener Netzfrequenz f über den Zusammenhang
aus der Polpaarzahl p. Da die Drehzahl n und das Drehmoment M über die Leistung P nach der Formel
direkt voneinander abhängig sind, ergibt sich bei konstanter Leistung und Netzfrequenz zwischen Polpaarzahl und Drehmoment die proportionale Abhängigkeit
-
 .
.
Außerdem weisen Torquemotoren einen großen Durchmesser auf. Denn das Drehmoment ist bei gegebener Kraftwirkung F über den Zusammenhang
vom Radius r abhängig. Die Kraftwirkung entsteht beim Elektromotor im Luftspalt zwischen Rotor und Stator. Daher können Außenläufer durch den größeren Luftspaltradius bei gleicher Baugröße höhere Momente erzeugen als Innenläufer. Die Kraftdichte beträgt ca. 6...8 N/cm2.[1]
Eigenschaften
Das große Antriebsmoment von Torquemotoren ermöglicht große Beschleunigungen und führt zu einer hohen Dynamik des Systems. Torquemotoren haben eine höhere Antriebssteifigkeit als klassische Motor-Getriebe-Einheiten und kein Verdrehspiel. Damit ergeben sich bessere Regeleigenschaften durch verringerte Störgrößen (vgl.: Kaskadenregelung) und eine erhöhte Wiederholgenauigkeit.[1]
Leistungsstarke Torquemotoren haben teils sehr große Abmessungen, aufgrund der entfallenden mechanischen Elemente wie Zahnriemen und Getriebe, bauen sie jedoch kompakt. Der Motor wird dabei koaxial zur anzutreibenden Welle angeordnet.
Torquemotoren sind durch den Wegfall mechanischer Elemente geräusch- und wartungsarm. Im Motor kommt es praktisch zu keinem Verschleiß. Die Wärmeentwicklung ist größer als bei herkömmlichen Servomotoren, eine exponierte Lage dieser Wärmequelle ist aufgrund des entfallenen Getriebes oftmals nicht möglich. Dadurch ist in vielen Fällen eine Wasserkühlung des Motors erforderlich.[1]
In der Anschaffung sind Torqueantriebe preisintensiv - verglichen mit konventionellen Motor-Getriebe-Einheiten um den Faktor 1,5 bis 2,5 teurer. Kosteneinsparungen ergeben sich bei der Wartung und beim Energieverbrauch. Denn obwohl Torquemotoren oft einen geringeren Wirkungsgrad aufweisen als schnelllaufende Motoren, ist das Gesamtsystem durch den Wegfall von Getrieben und Übertragungsgliedern meist effektiver.
Anwendungen
Heute werden in weiten Bereichen, zum Beispiel bei Werkzeugmaschinen Anforderungen gestellt, die nur mit modernen Antrieben befriedigt werden können. Motoren mit Getrieben sind hier oft im Nachteil, da Getriebe nur mit hohem Aufwand spielarm gebaut werden können und das wirksame Massenträgheitsmoment eines schnelllaufenden Motors im Quadrat zur Getriebeübersetzung auf die langsame Seite übertragen wird.
Torquemotoren werden für schnelle und genaue Verfahr- und Positionieraufgaben genutzt und finden überall dort Verwendung, wo hochdynamische, spielarme oder momentenstarke Antriebe benötigt werden.
- In Werkzeugmaschinen werden Drehtische[2], Rundttakttische[3] und andere Schwenkantriebe mit Torquemotoren ausgerüstet, um hohe Positioniergenauigkeiten und große Dynamik zu erreichen.
- In Servopressen ersetzen Torquemotoren die herkömmliche Motor-Schwungrad-Kombination um die Geschwindigkeit über den Hub dynamisch steuern zu können.[4]
- In Servoventilen werden schwenkende Torquemotoren zum geregelten Öffnen und Schließen eingesetzt.[5]
Quellen
- ↑ a b c Fischer Elektromotoren: Torquemotoren. 25. Februar 2010, abgerufen am 31. Mai 2011.
- ↑ Rückle: Turning Rotary Tabele. 16. März 2010, abgerufen am 31. Mai 2011.
- ↑ Fibro: Direkt angetriebene NC-Rundtische. 15. November 2006, abgerufen am 31. Mai 2011.
- ↑ Schuler: Servopressen in Monoblockbauweise. 23. Februar 2011, abgerufen am 31. Mai 2011.
- ↑ FH Stralsund: Labor Hydraulik. 1. September 2008, abgerufen am 31. Mai 2011.
Weblinks
-



Wikimedia Foundation.