- Canadarm2
-
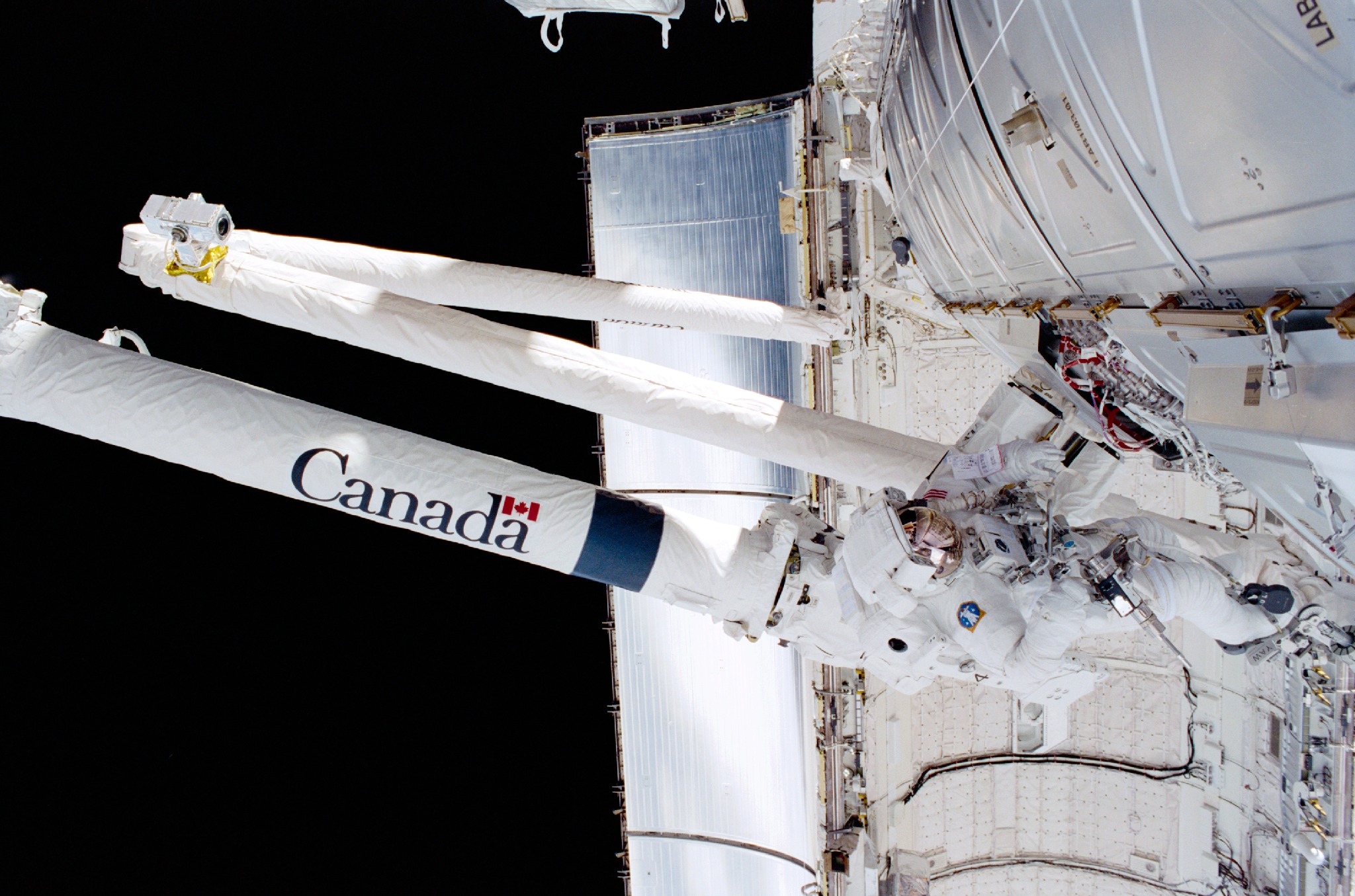
 Canadarm2-Montage während STS-100
Canadarm2-Montage während STS-100
 Der Greifmechanismus von Canadarm2
Der Greifmechanismus von Canadarm2Canadarm2 ist ein Multifunktionsroboterarm auf der Internationalen Raumstation (ISS). Der offiziell als Space Station Remote Manipulator System (SSRMS) bezeichnete Arm ist der kanadische Beitrag zur ISS. Er besteht aus drei Teilen, ist 17,6 Meter lang und kann bei einer Eigenmasse von 1,8 Tonnen maximal 116 Tonnen bewegen. Die maximale Leistungsaufnahme liegt bei lediglich zwei Kilowatt.
Canadarm2 ist Teil des Mobile Servicing System (MSS), das für den Zusammenbau, für Wartungs- und Reparaturarbeiten außerhalb der ISS sowie für die Bedienung von externen Anlagen und Experimenten vorgesehen ist. Die Raumfahrer können dabei über vier Videokameras jede Bewegung auch ohne direkten Sichtkontakt verfolgen und über die Fernbedienung im amerikanischen Labormodul Destiny steuern.
Der Canadarm2 ist nicht fest an einen Punkt mit der ISS verbunden, sondern kann – nicht zuletzt dank seiner sieben Freiheitsgrade – auf unterschiedliche Weise an der Station entlang bewegt werden, die nach ihrem vollständigen Ausbau 109 Meter messen wird.
Der Roboterarm verfügt an beiden Enden über eine Greifmechanik (engl.: Latching End Effectors - LEEs) die mit Schnittstellen für Daten- und Energieversorgung ausgestattet sind. Weiterhin sind an verschiedenen Stellen der Station dazu passende Konnektoren, sogenannte Power Data Grapple Fixtures (PDGF) montiert, an denen der Arm fixiert werden kann. So kann der Canadarm2 mit einem raupenartigen Bewegungsablauf, von PDGF zu PDGF über das amerikanische Segment der ISS wandern. Alternativ kann Canadarm2 mit dem so genannten Mobile Transporter verbunden werden und über ein Schienensystem entlang der Integrated Truss Structure der Station bewegt werden.
Die Anlieferung an die Station erfolgte durch die Shuttle-Mission STS-100 im April 2001 und wurde durch STS-104 im Juli 2001 komplettiert.
Siehe auch
Weblinks
 Commons: Canadarm2 – Album mit Bildern und/oder Videos und Audiodateien
Commons: Canadarm2 – Album mit Bildern und/oder Videos und Audiodateien- CSA-Website über Canadarm2 (englisch)

Sarja · Unity · PMA · Swesda · Integrated Truss Structure · Destiny · ESP · Mobile Servicing System · Canadarm2 · Quest · Pirs · Strela · Harmony · Columbus · Kibō · Canada Hand · Poisk · ELC-1, 2 3 & 4 · Tranquility · Cupola · Rasswet · PMM Leonardo · Alpha-Magnet-Spektrometer
Noch zu startende Module: Nauka · ERA · SPM
Gestrichene Module: CAM · Habitation Module · ICM · IPM · Research Modules · SPP · UDM · DSM · MPM Enterprise · Crew Return Vehicle
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Canadarm2 — Astronaut Stephen K. Robinson anchored to the end of Canadarm2 during STS 114 … Wikipedia
Canadarm2 — Système mobile de service Le système de service mobile (Mobile Servicing System) ou Canadarm2 joue un rôle clé dans l assemblage de la station spatiale internationale et dans sa maintenance : déplacement des modules et des équipements… … Wikipédia en Français
SSRMS — Canadarm2 Montage während STS 100 Der Greifmechanismus von Canadarm2 Canadarm2 ist ein Multifunktionsroboterarm auf der … Deutsch Wikipedia
Freedom (Raumstation) — Internationale Raumstation Die ISS im März 2009 aufgenommen aus dem Space Shuttle Discovery Emblem … Deutsch Wikipedia
ISS — Internationale Raumstation Die ISS im März 2009 aufgenommen aus dem Space Shuttle Discovery Emblem … Deutsch Wikipedia
International Space Station — Internationale Raumstation Die ISS im März 2009 aufgenommen aus dem Space Shuttle Discovery Emblem … Deutsch Wikipedia
Internationale Raumstation ISS — Internationale Raumstation Die ISS im März 2009 aufgenommen aus dem Space Shuttle Discovery Emblem … Deutsch Wikipedia
SSRMS — Système mobile de service Le système de service mobile (Mobile Servicing System) ou Canadarm2 joue un rôle clé dans l assemblage de la station spatiale internationale et dans sa maintenance : déplacement des modules et des équipements… … Wikipédia en Français
Systeme mobile de service — Système mobile de service Le système de service mobile (Mobile Servicing System) ou Canadarm2 joue un rôle clé dans l assemblage de la station spatiale internationale et dans sa maintenance : déplacement des modules et des équipements… … Wikipédia en Français
Système mobile de service — Le système de service mobile (Mobile Servicing System) ou Canadarm2 joue un rôle clé dans l assemblage de la station spatiale internationale et dans sa maintenance : déplacement des modules et des équipements extérieurs de la station ou… … Wikipédia en Français
- Kontaktieren Sie uns: Unterstützung, Werbung
Canadarm2


18+
© Academic, 2000-2026
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.