- European Robotic Arm
-
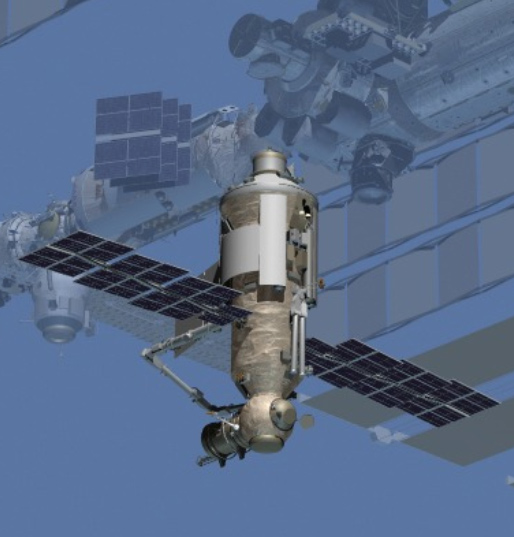
 MLM mit daran angebrachtem ERA (Computergrafik)
MLM mit daran angebrachtem ERA (Computergrafik)
Der European Robotic Arm (ERA), (englisch für Europäischer Roboterarm) ist ein von der ESA entworfener und in Europa gebauter Roboterarm, der vom russischen Segment der Internationalen Raumstation aus operieren soll.
Inhaltsverzeichnis
Entwicklung
Die Entwicklung und der Bau des ERA wurden als internationales Projekt der ESA in Auftrag gegeben. Unter Leitung des niederländischen Hauptvertragspartners Dutch Space beteiligen sich mehrere europäische Firmen aus acht Ländern an dem Vorhaben. Grundgedanke ist es, den Wirkungsbereich des Canadarm2 zu erweitern, da dieser nicht in der Lage ist, sich am russischen Stationssegment fortzubewegen und somit nicht alle Bereiche der Station erreichen kann. Darüber hinaus sollte ein redundantes System für einen möglichen Ausfall des Canadarm2 geschaffen werden.
Weiterhin dient ERA der Erprobung und Erforschung einsatztauglicher Robotertechnik selbst, da er weitgehend selbstständig arbeiten soll und das erste von der ESA entworfene System seiner Art darstellt. Die beiden anderen Roboterarme Canadarm2 und Strela hingegen werden überwiegend manuell gesteuert und bauen auf erfolgreichen Vorgängersystemen auf.
Start und Installation
Nach derzeitigem Planungsstand soll ERA zusammen mit dem russischen Multipurpose Laboratory Module (MLM) an Bord einer russischen Proton-M-Rakete vom Weltraumbahnhof Baikonur aus zur Raumstation gebracht werden. Der Start des zugeteilten Aufbaufluges 3R wird im NASA-Flugmanifest nach mehrfachen Verschiebungen derzeit (Stand Juli 2009) mit Dezember 2011 angegeben. Aufgrund der geplanten Umbauarbeiten und insbesondere aufgrund von Problemen bei der Finanzierung ist es aber wahrscheinlich, dass sich der Start um weitere Jahre verzögert.[1]
Bereits im Sommer 2006 wurde ERA nach Russland geliefert, um die Integration am MLM vorzunehmen und die Funktion des Systems zu überprüfen. Das MLM wird nach der Installation an der ISS Ausgangsmodul für ERA sein und enthält neben mehreren Versorgungspunkten auch den Steuerstand, der es der Besatzung ermöglicht, den Roboterarm vom Inneren der ISS aus zu bedienen. Darüber hinaus wird es auch außerhalb der Station möglich sein, den Roboterarm während eines Außenbordeinsatzes zu steuern. Bei der Steuerung aus dem Stationsinneren, kurz als IVA-MMI bezeichnet (Intra Vehicular Activity-Man Machine Interface), wird ein Laptop verwendet, auf dem der bedienende Astronaut den Arm und dessen Umgebung beobachten kann. Bei der Kontrolle des Armes während eines Ausstiegs, dem EVA-MMI (Extra Vehicular Activity-Man Machine Interface), kommt ein speziell angepasstes Steuermodul zum Einsatz, das eigens zur Bedienung mit sperrigen Handschuhen der Raumanzüge ausgelegt ist.
Aufgaben
Nach dem Vorbild des bereits an der ISS installierten kanadischen Roboterarms Canadarm2 wird ERA in der Lage sein, von verschiedenen Versorgungspunkten des russischen Segmentes aus zu operieren. Dazu wird ERA sich ähnlich einer Spannerraupe anhand der sogenannten Power and Data Grapple Fixtures frei fortzubewegen. Einige der von ERA wahrgenommenen Tätigkeiten werden vollständig automatisch, also ohne die direkte Bedienung durch ein Mitglied der ISS-Besatzung, oder halbautomatisch ablaufen. Dies soll präzises Arbeiten sicherstellen und zusätzlich der Besatzung ermöglichen, anderen Tätigkeiten nachzugehen. Neben Inspektionsarbeiten und dem Transport von Experimenten wird ERA auch die Raumfahrer selbst zu ihren Einsatzorten bringen, was eine wesentlich schnellere Fortbewegung bei Außeneinsätzen ermöglicht.
Die Aufgaben des ERA beinhalten:
- Aussetzen und Wiedereinbringen von Experimenten in den freien Weltraum
- Inspektion und Videoüberwachung der Station
- Unterstützung während Außenbordeinsätzen
- Installation und Aufstellung von Solarpaneelen
- Ersatz und Reparatur von Solarpaneelen
- Handhabung externer Nutzlasten
Komponenten
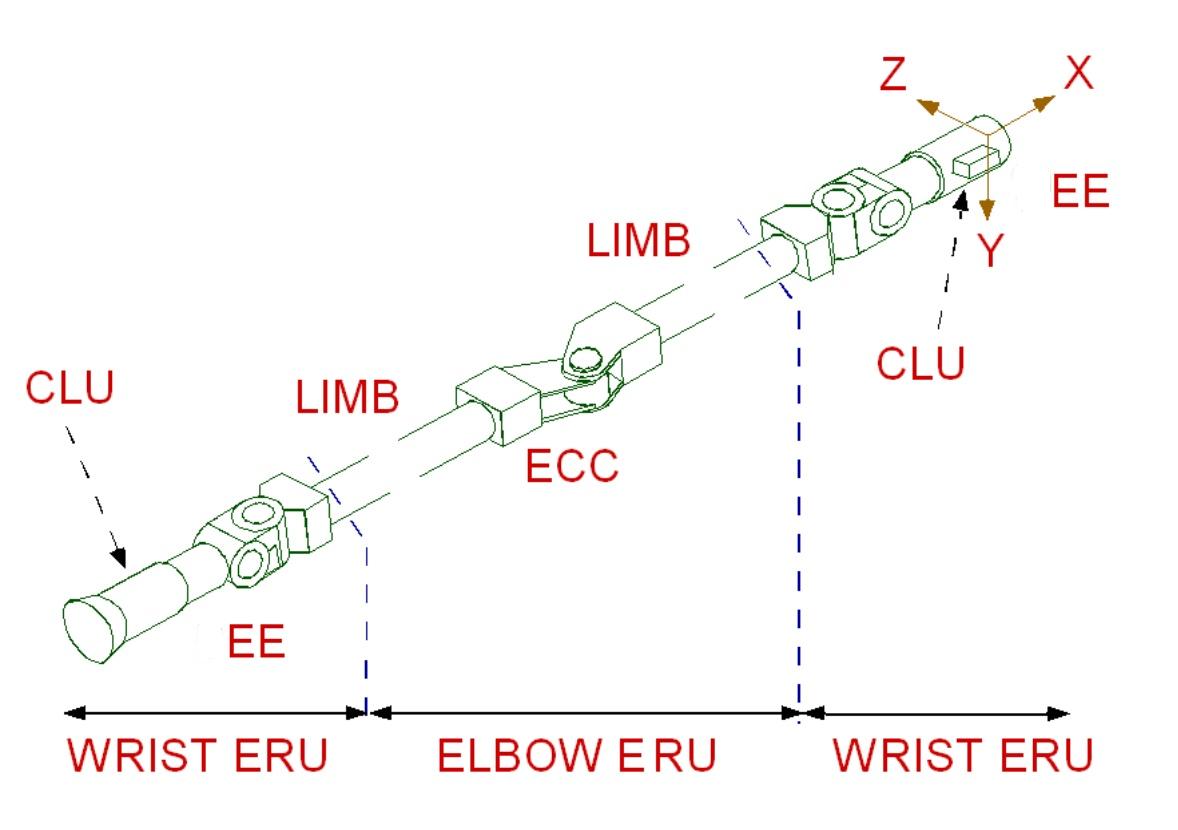
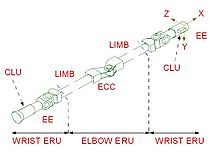 Die einzelnen Komponenten von ERA
Die einzelnen Komponenten von ERA- Zwei ca. 5 m lange, symmetrische Arm-Sektionen aus CFK (Gliedmaßen, engl. limbs)
- Zwei identische Greifer (engl. End Effectors (EE)) die auch Daten, Strom und mechanischen Antrieb auf Nutzlasten übertragen können
- Zwei Handgelenke mit je drei Verbindungsstellen
- Eine dem Ellbogen ähnliche Verbindung
- Einen zentralen Steuerungscomputer im Arm (engl. ERA Control Computer (ECC))
- Vier Kameras und dazugehörige Beleuchtungseinheiten (engl. Camera and Light Units (CLU))
Technische Daten
- Gesamtlänge: 11,3 m
- Operationsradius: 9,7 m
- Masse: 630 kg
- Maximale Nutzlast: 8 t
- Maximale Bewegungsgeschwindigkeit: 0,1 m/s
- Positionierungsgenauigkeit: 5 mm
- Energieverbrauch: 475 W im Durchschnitt, 800 W maximal
- Betriebsspannung: 120 V Gleichspannung
Weblinks
- Seite des Herstellers: ERA (englisch, niederländisch)
- ESA: ERA-Seite
- ESA: Bulletin Nr. 128, November 2006
- EADS Astrium: Robotiksysteme für die Raumstation
Einzelnachweise
- ↑ Russian ISS segment construction delayed for 5 years. RIA Novosti. Abgerufen am 24. Juli 2009 (englisch).

Sarja · Unity · PMA · Swesda · Integrated Truss Structure · Destiny · ESP · Mobile Servicing System · Canadarm2 · Quest · Pirs · Strela · Harmony · Columbus · Kibō · Canada Hand · Poisk · ELC-1, 2 3 & 4 · Tranquility · Cupola · Rasswet · PMM Leonardo · Alpha-Magnet-Spektrometer
Noch zu startende Module: Nauka · ERA · SPM
Gestrichene Module: CAM · Habitation Module · ICM · IPM · Research Modules · SPP · UDM · DSM · MPM Enterprise · Crew Return Vehicle
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
European Robotic Arm — The European Robotic Arm (ERA) is a robotic arm to be attached to the Russian Segment of the International Space Station. It will be the first robot arm that is able to work on Russian space station segments and is an additional robotic system to … Wikipedia
European Robotic Arm — Bras télémanipulateur européen Le bras télémanipulateur européen ou en anglais European robotic arm (ERA) est un bras robotique de manipulation destiné à la Station spatiale internationale (ISS).[1],[2],[3] … Wikipédia en Français
European robotic arm — Bras télémanipulateur européen Le bras télémanipulateur européen ou en anglais European robotic arm (ERA) est un bras robotique de manipulation destiné à la Station spatiale internationale (ISS).[1],[2],[3] … Wikipédia en Français
Robotic arm — [ DOF robotic arm is a kinematic chain (including the end effector at the end of the arm).] A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints … Wikipedia
European Space Agency — ESA Hauptverwaltung in Paris Die Europäische Weltraumorganisation (fr. Agence spatiale européenne (ASE), engl. European Space Agency, kurz ESA) ist eine internationale Weltraumorganisation mit Sitz in Paris. Sie wurde am 30. Mai 1975 zur besseren … Deutsch Wikipedia
Director General of the European Space Agency — The Director General of the European Space Agency is the highest ranked official of the European Space Agency (ESA), a space agency formed by the collaboration of prominent European nations. Contents 1 ELDO Secretaries General 2 ESRO Directors… … Wikipedia
Software patents under the European Patent Convention — Computer programs, software and patent law Topics … Wikipedia
Bras télémanipulateur européen — Le bras télémanipulateur européen ou en anglais European robotic arm (ERA) est un bras robotique de manipulation destiné à la Station spatiale internationale (ISS)[1 … Wikipédia en Français
International Space Station — ISS redirects here. For other uses, see ISS (disambiguation). International Space Station … Wikipedia
Freedom (Raumstation) — Internationale Raumstation Die ISS im März 2009 aufgenommen aus dem Space Shuttle Discovery Emblem … Deutsch Wikipedia
European Robotic Arm

18+
© Academic, 2000-2026
- Kontaktieren Sie uns: Unterstützung, Werbung
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.