- ISS
-
Internationale Raumstation 

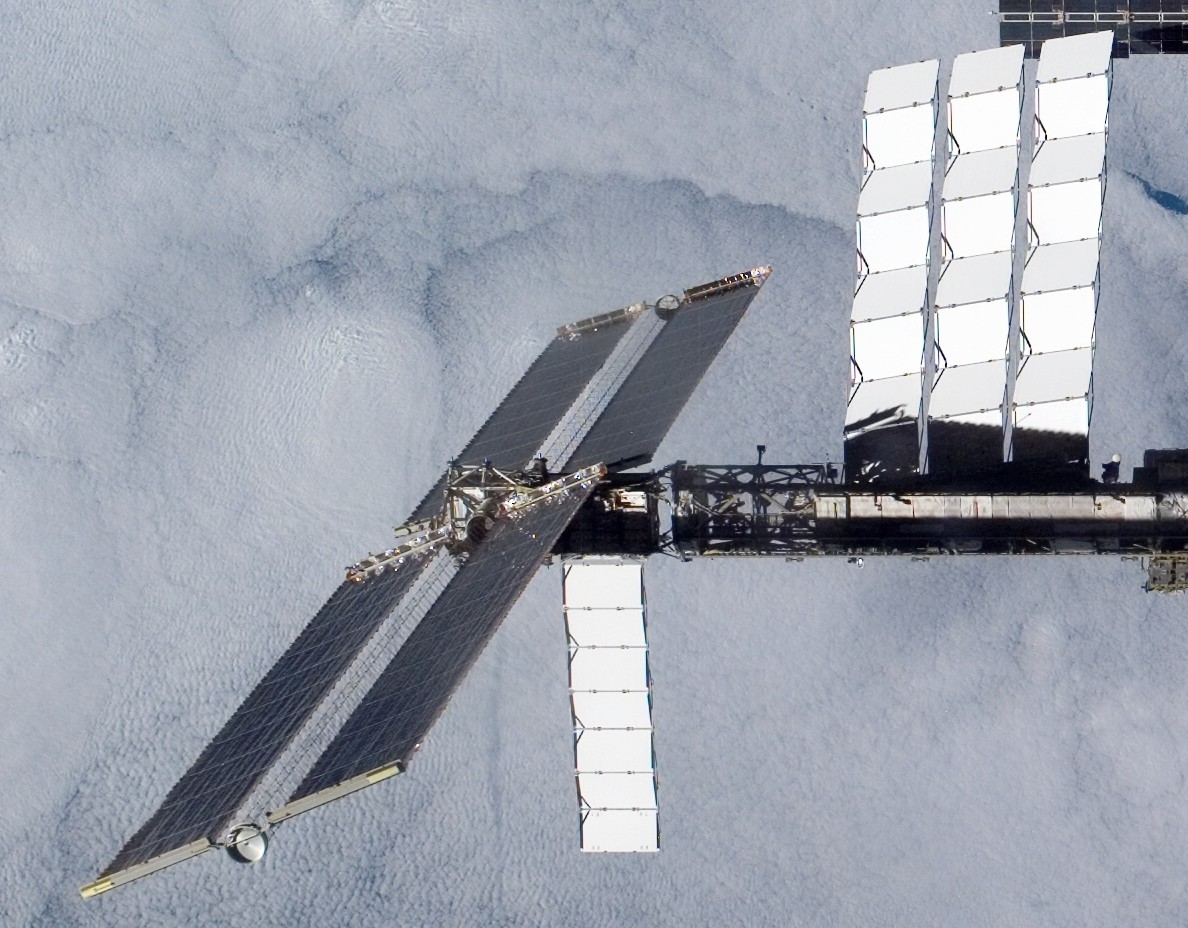
Die ISS im März 2009 aufgenommen aus dem Space Shuttle DiscoveryEmblem 
Maße im Endausbau Spannweite: 109 m Länge: 97,9 m Tiefe: 27,5 m Rauminhalt: 910 m³ Masse: 400 t Umlaufbahn Apogäum: 320–410 km[1] Perigäum: 320–390 km[1] Durchschnittliche Orbitalhöhe: ca. 350 km[1] Bahnneigung: 51,6° Umlaufzeit: ca. 91 min Relativgeschwindigkeit: ca. 28.000 km/h Internationale Katalognummer: 1998-067A Energieversorgung im Endausbau Elektrische Leistung: 120 Kilowatt Solarzellenfläche: 4.500 m² Flugstatistik Gemessen an Sarja, aktueller Stand Zeit im Orbit (Sarja): 3806 Tage Zurückgelegte Strecke: 2558 Mio. km Erdumkreisungen: 60227 Bemannt seit: 3094 Tagen Aktuelle Besatzung ISS-Expedition 19
Rettungsschiff: Sojus TMA-14

v.l.n.r.- Michael Barratt (seit 28. März 2009)
- Gennadi Iwanowitsch Padalka (seit 28. März 2009, Kommandant)
- Koichi Wakata (seit 17. März 2009)
Konfiguration 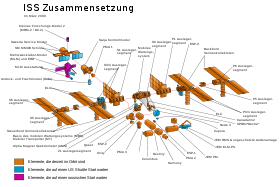
Bereits vorhandene und noch zu startende Module,
Stand März 2009Die Internationale Raumstation (engl. International Space Station, kurz ISS) ist eine bemannte Raumstation, die derzeit in internationaler Kooperation betrieben und weiter ausgebaut wird.
Die Pläne für eine große, internationale Raumstation gehen bis in die 1980er Jahre zurück. Die Station war damals noch unter den Namen Freedom oder Alpha in Planung. Die ISS befindet sich seit 1998 im Bau und ist zurzeit das größte künstliche Objekt im Erdorbit. Sie kreist in ca. 350 km Höhe mit einer Bahnneigung von 51,6° ca. alle 91 min um die Erde und soll nach ihrer geplanten Fertigstellung im Jahre 2011 maximale Abmessungen von etwa 110 m × 100 m × 30 m erreichen. Danach soll sie mindestens bis ins Jahr 2020 weiterbetrieben werden.[2]
Beteiligte Länder
Am Projekt sind neben der amerikanischen NASA und der russischen Raumfahrtagentur Roskosmos auch Staaten der europäischen Weltraumagentur ESA beteiligt. Deutschland, Frankreich, Italien, Belgien, die Schweiz, Spanien, Dänemark, die Niederlande, Norwegen und Schweden haben den Vertrag über den Bau der Station im Jahre 1998 unterschrieben. Ebenso beteiligt sind die kanadische und die japanische Raumfahrtbehörde. Brasilien hat mit den USA ein separates Abkommen über die Nutzung der ISS.
Vorgeschichte
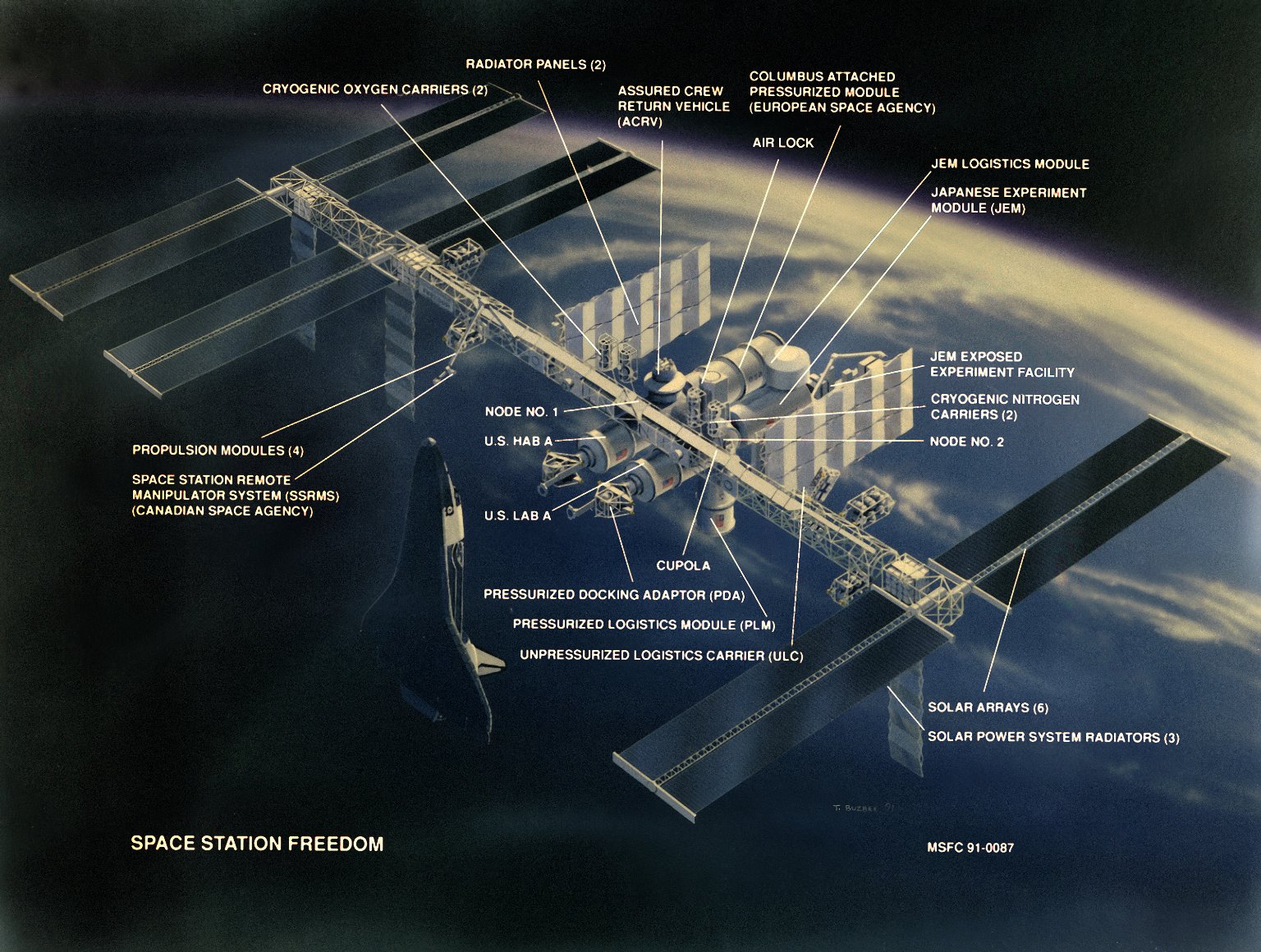
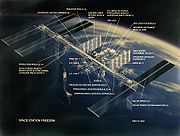 Die geplante US-Raumstation Freedom
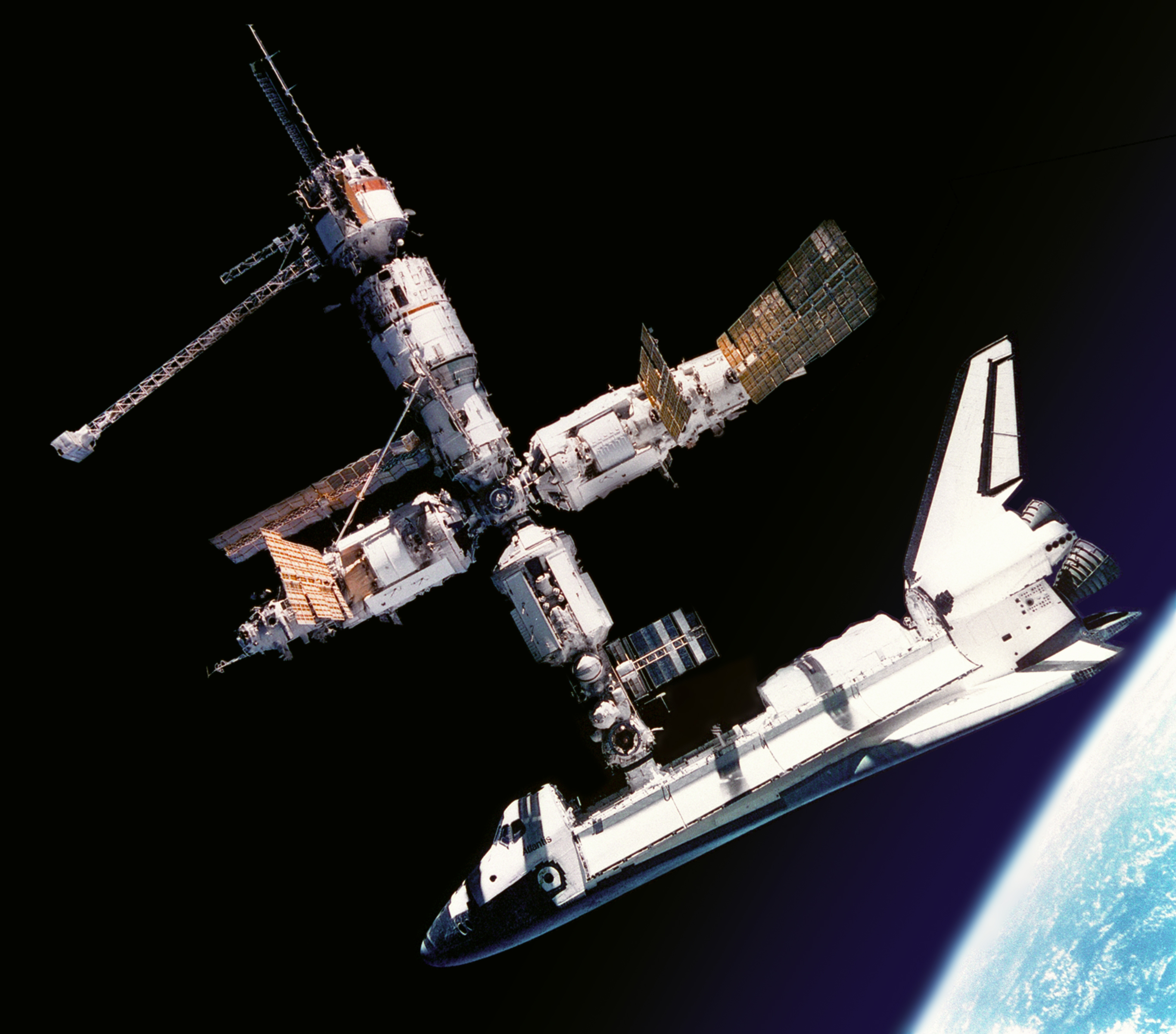
Die geplante US-Raumstation Freedom Das Shuttle-Mir-Programm als Vorläuferprojekt der ISS
Das Shuttle-Mir-Programm als Vorläuferprojekt der ISSErste Ideen für eine dauerhaft bewohnte Station im Weltall kamen bei der amerikanischen Raumfahrtbehörde NASA schon sehr früh auf. Zu Beginn der 1960er Jahre, also noch lange vor der ersten Mondlandung, dachte man an eine Raumstation, die von etwa zehn bis zwanzig Personen bewohnt sein sollte. Nach Abschluss des Apollo-Programms wandte man sich konkreter dem Bau von Raumstationen zu, um den Anschluss an die Sowjetunion nicht zu verlieren, die 1971 mit Saljut 1 ihre erste Raumstation gestartet hatte. So wurde im Jahre 1973 die amerikanische Station Skylab gestartet, die insgesamt 171 Tage bewohnt war. Danach wandten sich die Amerikaner jedoch der Entwicklung des Space Shuttles zu, während die Sowjetunion sechs weitere Saljut-Stationen und vor allem die modulare Raumstation Mir in den Orbit brachte und enorme Erfahrung mit Langzeitflügen sammeln konnte.
Nach dem Erstflug des Space Shuttles im Jahre 1981 rückte das Konzept einer Raumstation wieder in den Blickpunkt, weil diese nach Ansicht der NASA-Strategen der nächste logische Schritt in der Raumfahrt sei. Im Mai 1982 wurde im NASA-Hauptquartier die Space Station Task Force geschaffen. Im Januar 1984 kündigte der damalige US-Präsident Ronald Reagan in Anlehnung an den Aufruf Kennedys zur Mondlandung an, es sei das nationale Ziel, eine ständig bemannte Raumstation innerhalb eines Jahrzehnts zu bauen. Die Kosten für eine solche Station wurden damals auf acht Milliarden US-Dollar geschätzt. Ein Jahr später wurde entschieden, die Station zusammen mit internationalen Partnern zu bauen. Daraufhin schlossen sich die ESA sowie Kanada und Japan dem Projekt an. Im Jahre 1988 wurde die geplante Station von Reagan auf den Namen Freedom (Freiheit) getauft.Nach dem Ende des Kalten Krieges wurde eine engere Zusammenarbeit der NASA mit Russland möglich. Das ursprüngliche Freedom-Projekt wurde gekürzt, weil die Kosten der geplanten Raumstation explodierten, und in Space Station Alpha umbenannt. 1993 unterzeichneten Russland und die USA ein Abkommen über zehn Shuttle-Flüge zur russischen Raumstation Mir sowie über Langzeitaufenthalte einiger US-Astronauten auf der Mir, später bekannt als das Shuttle-Mir-Programm. Die NASA zahlte dafür 400 Millionen US-Dollar. Dies markierte die erste Zusammenarbeit der beiden Raumfahrtmächte seit dem Apollo-Sojus-Projekt im Jahre 1975.[3]
Unter US-Präsident Bill Clinton wurde dann das Projekt einer großen Raumstation im November 1993 zusammen mit Russland neu aufgelegt – Russland steuerte die Pläne der geplanten Mir-2-Station bei. Auf amerikanischer Seite wurde der Name Alpha vorgeschlagen, der jedoch von Russland abgelehnt wurde, da dort die Mir-Station als „erste“ Raumstation angesehen wird. Bis 1998 schlossen sich 13 weitere Länder dem Projekt an: elf der ESA-Staaten (Großbritannien war Mitunterzeichner des Vertrages, stieg jedoch später aus), Japan und Kanada. Zudem unterzeichnete Brasilien im Oktober 1997 mit den USA einen separaten Vertrag über die Nutzung der Raumstation, die nun den Namen International Space Station (ISS) trägt. Im Jahr darauf begann mit dem Start des russischen Fracht- und Antriebmoduls Sarja (Sonnenaufgang) der Aufbau der Station.
Aufbauchronik
Die ISS ist nach dem Vorbild der russischen Raumstation Mir modular aufgebaut. Einzelne Baugruppen werden von Trägerraketen und Raumfähren in den Orbit gebracht und dort zusammengesetzt. Dazu sind rund 40 Aufbauflüge nötig. Nach aktueller Planung sollen 35 davon vom amerikanischen Space Shuttle durchgeführt werden, der Rest von den unbemannten russischen Trägerraketen Proton und Sojus. 25 Shuttleflüge wurden bereits durchgeführt, 10 weitere sind bis zur Ausmusterung der Raumfähren im Jahre 2010 geplant.[4] Bis dahin soll die Station fertig aufgebaut sein und in den Routinebetrieb übergehen.
Die ISS soll nach ihrer Fertigstellung mit den Solarmodulen 80 Meter Spannweite, 107 Meter Länge und über 400 Tonnen Masse haben. Derzeit beträgt die Masse der ISS 280 Tonnen bei einer Länge der Gitterstruktur von 67 Metern. Die endgültige Spannweite ist seit der Installation der ersten Solarzellen bereits erreicht. Damit ist sie die größte Raumstation, die bisher gebaut wurde.
Unbemannter Aufbau
 Die ersten Bestandteile der ISS kurz nach dem Baubeginn 1998: Das russische Kontrollmodul Sarja (unten) und der US-amerikanische Verbindungsknoten Unity (oben)
Die ersten Bestandteile der ISS kurz nach dem Baubeginn 1998: Das russische Kontrollmodul Sarja (unten) und der US-amerikanische Verbindungsknoten Unity (oben)Das erste ISS-Bauteil im All war das von Russland gebaute Fracht- und Antriebsmodul Sarja. Es wurde am 20. November 1998 von einer Proton-Schwerlastrakete in die vorgesehene Umlaufbahn gebracht.[5] Zwei Wochen später wurde mit der Space-Shuttle-Mission STS-88 der erste Verbindungsknoten Unity (Node 1) in den Orbit gebracht und mit Sarja verbunden. Dieser Knoten verbindet den amerikanischen mit dem russischen Teil der Station. Als nächstes folgten mit STS-96 und STS-101 zwei logistische Shuttle-Flüge, die dem Transport von Ausrüstung zur Station dienten. Zudem wurden weitere Arbeiten am Äußeren des Komplexes ausgeführt.
Als nächstes Modul startete im Sommer 2000 das russische Wohnmodul Swesda. Es wurde ebenfalls von einer Proton-Rakete gestartet und dockte automatisch am Sarja-Modul an. Bei einem weiteren Logistikflug (STS-106) wurden Lebensmittel, Kleidung, Wasser und sonstige Alltagsgegenstände für die erste Stammbesatzung zur Station gebracht. Zudem wurde das für die Aufbereitung der Atemluft zuständige Elektron-System installiert. Im Oktober 2000 wurde mit der Mission STS-92 das erste Gittersegment, genannt Integrated Truss Structure Z1, zur Station gebracht. Es diente vorübergehend als Verbindungsstück zwischen einem Solarzellenträger und dem bewohnten Teil der ISS. Außerdem beherbergt es Apparaturen zur Lageregelung und am Zenit-Dockingport einen kleinen Stauraum. Danach konnte am 2. November 2000 die erste Langzeitbesatzung, ISS-Expedition 1, auf der Station einziehen. Sie startete mit Sojus TM-31 zur Station.
Bemannter Aufbau
 Bauzustand August 2005
Bauzustand August 2005Als nächstes Modul wurde mit der Shuttle-Mission STS-97 das erste von vier großen Solarmodulen zur Station gebracht. Der P6-Kollektor wurde im Dezember 2000 zunächst auf Z1 installiert und lieferte in der Anfangsphase nahezu die gesamte Energie zum Betrieb der Station. Es wurde erst im Oktober 2007 an das Backbordende der ISS umgesetzt. Mit der Mission STS-98 wurde das amerikanische Labormodul Destiny zur Station gebracht und an Unity angedockt. Nach einem weiteren Logistikflug wurde mit STS-100 der erste Roboterarm der Station, Canadarm2, sowie mit STS-104 die US-Luftschleuse Quest angeliefert. Dies versetzte die Raumfahrer in die Lage, ohne die Hilfe des Shuttles Weltraumausstiege durchzuführen und zum Aufbau der Station beizutragen.
Am 14. September 2001 startete das einzige ISS-Modul, das mit einer Sojus-Rakete gestartet wurde: Das russische Kopplungsmodul Pirs wird sowohl zum Andocken von Sojus- und Progress-Raumschiffen als auch für Ausstiege in russischen Raumanzügen genutzt.
Darauf wurden drei weitere Elemente der Gitterstruktur der Station gestartet. Die Elemente S0, S1 und P1 bilden das Gerüst, an dem später die weiteren Ausleger mit den zugehörigen Solarzellen befestigt werden sollen.
In den folgenden Missionen wurde das Gerüst und die Stromversorgung weiter ausgebaut. Zunächst wurden von STS-115 im September 2006 auf der Backbordseite ein Stück Gitterstruktur und ein großes Solarmodul (P3/P4) angebaut und drei Monate später um das Gitterelement P5 verlängert (STS-116). Im Juni 2007 folgten auf der Steuerbordseite mit der Mission STS-117 ein weiteres Gitterelement mitsamt einem Solarmodul (S3/S4) und zwei Monate später die Verlängerung S5 (STS-118).
.jpg) Grafik der ISS nach ihrer geplanten Fertigstellung (Stand Juni 2006)
Grafik der ISS nach ihrer geplanten Fertigstellung (Stand Juni 2006)Im Oktober 2007 wurde mit STS-120 der Verbindungsknoten Harmony (Node 2) zur ISS gebracht. Außerdem versetzte die STS-120-Mannschaft das Solarmodul P6 an seinen endgültigen Platz am linken Ende des Gerüsts. Nachdem die Discovery die ISS verlassen hatte, wurde durch die 16. Langzeitbesatzung der Shuttle Andockadapter (PMA-2) von Destiny auf Harmony umgesetzt und die Baugruppe Harmony/PMA-2 auf der endgültigen Position an der Stirnseite von Destiny angedockt. Nach über sechs Jahren Pause war dies die erste Erweiterung des von den ISS-Besatzungen nutzbaren Lebensraumes auf der ISS. Das europäische Forschungsmodul Columbus wurde am 11. Februar 2008 an der ISS installiert.
Am 3. Juni 2008 wurde die Installation des japanischen Hauptmoduls von Kibō abgeschlossen. Durch STS-119 wurde im März 2009 das vierte und letzte Solarmodul S6 installiert. Im Mai 2009 soll die Besatzung der ISS von derzeit drei auf sechs Raumfahrer aufgestockt und das letzte Bauteil des Kibō-Moduls installiert werden. Im weiteren Verlauf des Jahres folgt der Verbindungsknoten Tranquility (Node 3) mit der Aussichtskuppel Cupola und das Mini-Research Module 2. 2010 folgt das das Docking Cargo Module und 2011 soll die Station mit dem russischen Labormodul (MLM) fertiggestellt sein.
Eine Liste aller ISS-Module geordnet nach dem Zeitpunkt des Starts ist unter Liste der ISS-Module zu finden.
Umlaufbahn
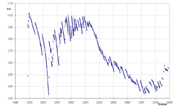 Mittlere Bahnhöhe der ISS seit Start im Nov. 1998 (Stand Jan 2009)
Mittlere Bahnhöhe der ISS seit Start im Nov. 1998 (Stand Jan 2009)Die ISS befindet sich in einer annähernd kreisförmigen niedrigen Erdumlaufbahn mit einer Bahnneigung von 51,6° gegen den Äquator und umrundet die Erde etwa alle eineinhalb Stunden. Genau genommen ist die Bahn eine Ellipse geringer Exzentrizität, wodurch die Höhe während jedes Umlaufs zwischen Perigäum und Apogäum um bis zu 20 Kilometer schwankt. Die mittlere Bahnhöhe nimmt durch den Luftwiderstand der Station allmählich mit 50 bis 150 m pro Tag ab. Diesem Höhenverlust wird je nach Erfordernissen des Stationsbetriebs in unregelmäßigen Abständen durch Triebwerkszündungen von Shuttle, Sojus, Progress, ATV oder Swesda-Modul unter Aufwendung von etwa 7000 Kilogramm Treibstoff pro Jahr entgegengewirkt, so dass die mittlere Höhe der Station zwischen etwa 330 und 400 Kilometern gehalten wird. Gelegentlich kommt es auch vor, dass die Höhe durch Triebwerkszündungen verringert wird, um Weltraummüll auszuweichen, so geschehen z.B. am 23. März 2009. Daten und eine Graphik zur aktuellen Umlaufbahn gibt es z.B. bei Heavens-Above (siehe Weblinks). Im TLE-Format veröffentlichte Satellitenbahnelemente geben die mittlere Bewegung in Umläufen pro Tag an, woraus sich direkt die Umlaufzeit und die große Halbachse der Bahnellipse ergibt. Die meist angegebene mittlere Höhe ist die Differenz von großer Halbachse und Erdradius.
Versorgung
Die Versorgung der Crew mit Lebensmitteln, Frischwasser, Kleidung, Sauerstoff sowie Ersatzteilen und wissenschaftlichen Experimenten wurde bis März 2008 ausschließlich durch russische Progress-Frachter und amerikanische Space Shuttles sichergestellt. Seit April 2008 steht hierfür nach dem erfolgreichen Erstflug von „Jules Verne“ zusätzlich das europäische Automated Transfer Vehicle (ATV) zur Verfügung. Ein Jahr später soll der Erstflug des japanischen Versorgungsschiffes H-2 Transfer Vehicle (HTV) stattfinden.
Progress
Hauptartikel: Progress
Die russischen Progress-Transportraumschiffe stellen die Grundversorgung für die Station sicher. Die von dem Sojus-Raumschiff abgeleiteten unbemannten Transporter sind in der Lage, bei durchschnittlich vier Flügen pro Jahr die ISS allein zu versorgen, sofern sie nur von zwei Personen bewohnt wird. Dies musste während des Flugverbots der Shuttle-Flotte nach dem Columbia-Absturz 2003 durchgeführt werden. Bei höherer Startfrequenz können auch größere Besatzungen versorgt werden.
Die Raumschiffe sind nicht wiederverwendbar. Nach dem Andocken an einem Port am russischen Teil der Station werden die rund 2,5 Tonnen Fracht und Treibstoff zur Station transferiert. Anschließend wird Progress mit Müll gefüllt, nach mehreren Monaten wieder abgekoppelt und in der Erdatmosphäre zum Verglühen gebracht.
Ein Nachteil der Progress-Raumschiffe ist der kleine Durchmesser der Verbindungsluken, weshalb sperrige Nutzlasten und Ersatzteile (wie z. B. Gyroskope) nicht von Progress angeliefert werden können. Russland setzt für Transporte zur ISS die Progress-Versionen Progress M, Progress M1 und Progress M1M ein. Die ersten beiden Versionen wurden bereits zur Versorgung der Raumstation Mir verwendet und unterscheiden sich im Wesentlichen lediglich im Anteil des Treibstoffes, der mitgenommen werden kann. Progress M1M wurde erstmals am 26. November 2008 eingesetzt und hat eine deutlich höhere Nutzlastkapazität.
Multi-Purpose Logistics Module
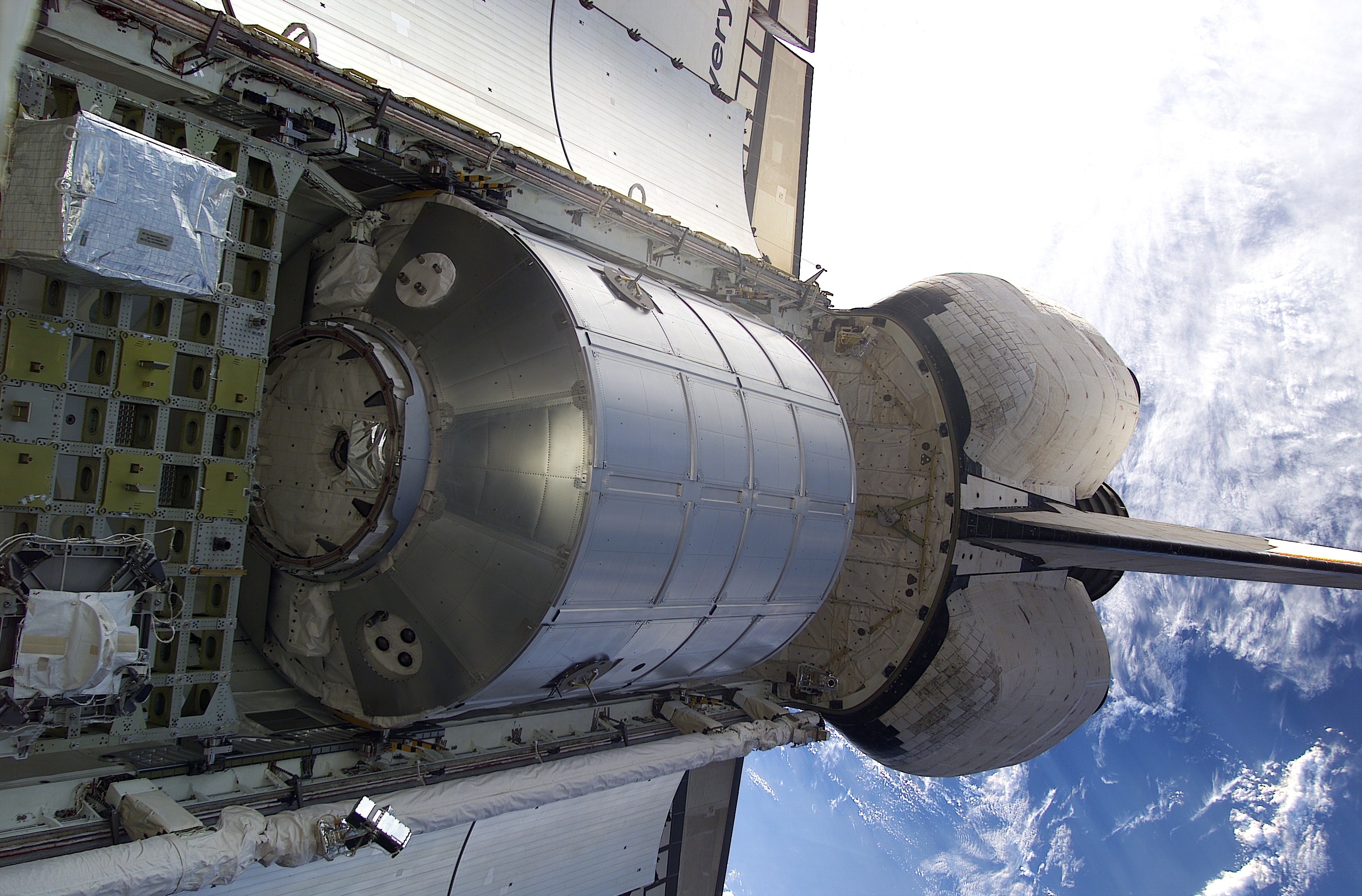
 Das Logistikmodul MPLM in der Nutzlastbucht der Raumfähre Discovery
Das Logistikmodul MPLM in der Nutzlastbucht der Raumfähre DiscoveryHauptartikel: Multi-Purpose Logistics Module
Das Multi-Purpose Logistics Module (MPLM) ist ein bei Alenia Spazio in Italien gebautes Modul, das in der Nutzlastbucht des Space Shuttles zur Raumstation gebracht wird. Seine Nutzlastkapazität liegt mit 9,1 Tonnen höher als die der Progress-Raumschiffe. Da das Modul zum Start einen Shuttle benötigt, ist sein Start aber auch sehr viel teurer. Die Module sind bis zu 25 mal verwendbar und können auch eingesetzt werden, um Ausrüstungsgegenstände oder Resultate von Experimenten zurück zur Erde zu bringen. Nach dem Andocken des Shuttles wird das Modul von einem Roboterarm aus der Ladebucht der Raumfähre gehievt und an einem Stationsmodul befestigt. Dort wird es innerhalb weniger Tage entladen und wieder vom Shuttle zur Erde gebracht.[6]
ATV und HTV
Seit 2008 leistet auch Europa seinen Beitrag zur Versorgung der Station. Dies geschieht mit dem ATV (Automated Transfer Vehicle), das wie die russischen Progress-Schiffe Fracht transportiert. Die Nutzlast beträgt mit 7,5 Tonnen in etwa das Dreifache eines Progress-Transporters. Davon können etwa 4,5 Tonnen Treibstoff sein, der genutzt wird, um die Bahn der ISS anzuheben. Dies ist regelmäßig erforderlich, da sie durch die Reibung an der Restatmosphäre zwischen 50 und 150 Meter pro Tag an Höhe verliert.
Das erste ATV wurde am 9. März 2008 unter dem Namen „Jules Verne“ von einer Ariane-5-Rakete gestartet und dockte am 3. April erfolgreich an der Raumstation an. Am 29. September 2008 verglühte „Jules Verne“ planmäßig über dem Pazifik. Der Vertrag der ESA umfasst insgesamt fünf ATV-Einheiten. Ab 2010 findet bis einschließlich 2013 jedes Jahr ein Flug mit einem ATV statt.
Für die Kopplung wird ein lasergestütztes automatisches System genutzt, mit dem das ATV am hinteren Andockstutzen des russischen Swesda-Moduls anlegen kann. Dort befinden sich die benötigten Andockhilfen (Antennen und Laser-Reflektoren).
Ein ähnliches Transportfahrzeug wird auch von der japanischen Weltraumagentur JAXA entwickelt. Es wurde nach der H-2-Trägerrakete, die es starten soll, auf den Namen H-2 Transfer Vehicle (HTV) getauft. Die Größe des HTV entspricht in etwa einem Bus; die Nutzlast beträgt rund sechs Tonnen.[7] Im Gegensatz zum ATV ist der japanische Transporter nicht in der Lage, ein automatisches Andockmanöver durchzuführen, sondern wird vom Roboterarm der Station eingefangen und an einem freien Kopplungsstutzen im US-Teil der Station befestigt. Der Erstflug ist für das Jahr 2009 geplant.
Private Dienstleister
Um nach der Beendigung des Space Shuttle-Programms 2010 auch weiterhin die Station unter amerikanischer Leitung versorgen zu können, hat die NASA das COTS-Programm aufgelegt. Dadurch soll die Versorgung mit Material und Besatzung auch vor der Indienststellung der Orion-Raumschiffe im Jahre 2015 sichergestellt werden. Nach einem Wettbewerb wurden die beiden privaten Unternehmen SpaceX und Rocketplane Kistler beauftragt, entsprechende Raketen sowie Crew- und Logistik-Module zu entwickeln. Nachdem Rocketplane Kistler die Zusagen bezüglich der Einwerbung von Drittmitteln nicht hatte einhalten können, wurde die Beteiligung der Firma seitens der NASA im Oktober 2007 aufgekündigt.[8] Demonstrationsmissionen für das COTS-Programm sind für das Jahr 2008 und 2009 geplant. [9]
Besatzungen
Die Raumstation ist seit dem 2. November 2000 permanent besetzt. Die jeweiligen Langzeitbesatzungen tragen die Bezeichnung „ISS-Expedition“ und eine fortlaufende Zahl. Zunächst starteten jeweils drei Raumfahrer (Kommandant und zwei Bordingenieure) gemeinsam zur ISS, um für sechs bis sieben Monate dort zu bleiben. Die Langzeitbesatzungen wurden anfangs jeweils durch Shuttle-Missionen ausgetauscht. Nach dem Unglück des Space Shuttles Columbia am 1. Februar 2003 standen die Space Shuttles längere Zeit nicht mehr für die Versorgung der Station zur Verfügung. Die Besatzungsgröße wurde deshalb ab der ISS-Expedition 7 auf zwei Personen reduziert und der Crew-Austausch wurde auf Sojus-Raumschiffe umgestellt. Mit der Shuttle-Mission STS-121 wurde der Deutsche Thomas Reiter im Juli 2006 als erster ESA-Raumfahrer zu einem Langzeitaufenthalt auf die ISS gebracht. Damit hatte die Station wieder drei Besatzungsmitglieder. Seitdem werden zwei Raumfahrer durch Sojus-Raumschiffe ausgewechselt, der Dritte wird jeweils per Space Shuttle zur Station bzw. zurück zur Erde gebracht. Zur Zeit befindet sich die ISS-Expedition 19 auf der Station, die voraussichtlich bis Mai 2009 andauern wird.
 Jeff Williams bei der Arbeit im Destiny-Labor
Jeff Williams bei der Arbeit im Destiny-LaborIm Mai 2009 beginnt mit der Ankunft von Sojus TMA-15 die ISS-Expedition 20. Ab diesem Zeitpunkt sollen erstmals sechs Besatzungsmitglieder dauerhaft auf der ISS arbeiten, da ab dann zwei Sojus-Raumschiffe für eine eventuelle Evakuierung der Station zur Verfügung stehen werden. Die NASA schätzt die Wahrscheinlichkeit für eine Evakuierung innerhalb eines Zeitraumes von 6 Monaten mit 1:124 ab (2008). Eine Übersicht über alle Langzeitbesatzungen gibt die Liste der ISS-Expeditionen.
Die ersten siebzehn Expeditionen bestanden fast ausschließlich aus russischen und US-amerikanischen Raumfahrern. Nur der Deutsche Thomas Reiter (fünfeinhalb Monate) und der Franzose Léopold Eyharts (eineinhalb Monate) absolvierten als ESA-Astronauten ebenfalls Langzeitaufenthalte auf der ISS.
Neben den Langzeitbesatzungen haben bereits zahlreiche andere Raumfahrer aus den verschiedensten Nationen die ISS besucht. Während ihr Sojus-Raumschiff bzw. das Space Shuttle an der ISS angekoppelt war, arbeiteten deren Besatzungen für etwa ein bis zwei Wochen auf der ISS und kehrten anschließend zurück.
Insgesamt haben bereits 171 Personen die ISS besucht, davon absolvierten (bzw. absolvieren) 47 einen oder mehrere Langzeitaufenthalte. Sechs Besucher waren Weltraumtouristen, die sich für je etwa zwanzig Millionen US-Dollar einen Flug mit einem Sojus-Raumschiff gekauft haben und sich jeweils ungefähr eine Woche auf der Station aufhielten, einer davon, Charles Simonyi, sogar bereits zwei mal. Eine alphabetische Übersicht gibt die Liste der Raumfahrer auf der Internationalen Raumstation, eine chronologische Übersicht bietet die Liste bemannter Missionen zur Internationalen Raumstation.
Module
Hauptartikel: Liste der ISS-Module
Grundsätzlich unterscheidet man unter Druck stehende und nicht unter Druck stehende Module. Sämtliche Module, die von den Astronauten zum Wohnen, Schlafen und zur Arbeit benutzt werden, stehen unter Druck, da Menschen im Vakuum nicht überleben können. Das Lebenserhaltungssystem an Bord sorgt für eine Atmosphäre, die der irdischen entspricht (21 Prozent Sauerstoff, 78 Prozent Stickstoff, 1014 Hektopascal Druck). Zu den unter Druck stehenden Modulen zählen zum Beispiel das amerikanische Destiny-Labor oder das russische Modul Sarja. Solarzellen oder Gitterstrukturen stehen nicht unter Druck.
Wohn- und Arbeitsmodule
- Sarja
- Sarja (russisch Заря für „Morgenröte“) war das erste Modul der ISS. Es wurde von Russland gebaut und gestartet, aber von der NASA finanziert.[10] In der ersten Ausbaustufe stellte es Strom sowie die Möglichkeiten zur Navigation zur Verfügung. Heute wird es als Frachtmodul für die Zwischenlagerung von Ausrüstungsteilen verwendet.
- Unity
- Der Unity-Verbindungsknoten (Node 1) (englisch für „Einigkeit“, „Eintracht“) verbindet den russischen Teil über einen Adapter mit dem Rest der Station und verfügt über insgesamt sechs Kopplungsstutzen. Teilweise wird der Knoten auch als Stauraum für Nahrungsmittel genutzt, wenn kurz nach der Ankunft von Progress-Frachtern im Sarja-Modul nicht ausreichend Platz ist.
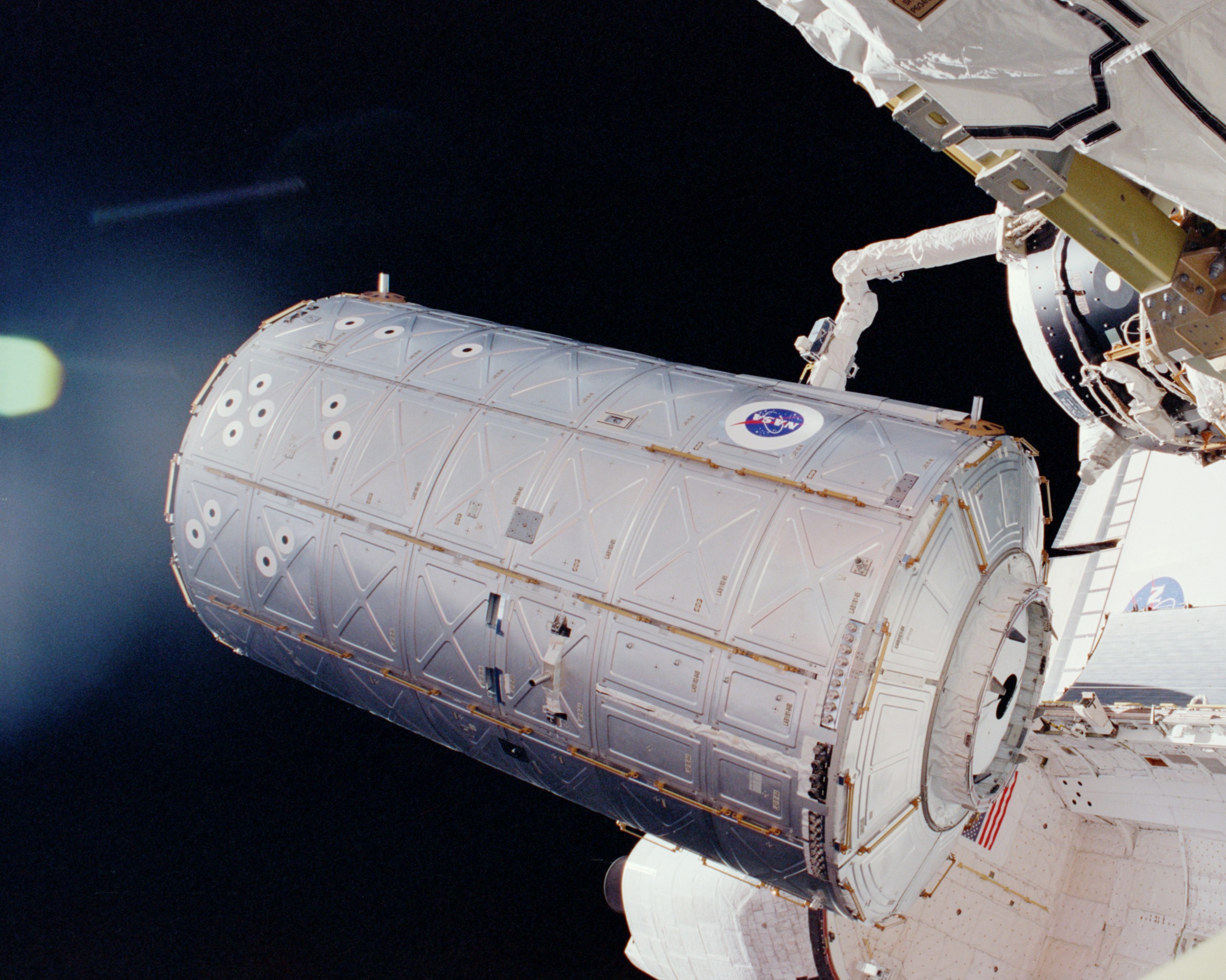
 Das Destiny beim Anbau an die Station
Das Destiny beim Anbau an die Station- Swesda
- Swesda (russisch Звезда für „Stern“) ist das russische Wohn- und Servicemodul der Station. Es beinhaltet Steuereinrichtungen, Lebenserhaltungssysteme, hygienische Einrichtungen, Küche, Trainingsgeräte und mehrere Wohnkabinen. Am hinteren Kopplungsstutzen von Swesda docken Sojus-Raumschiffe und Progress-Frachter, sowie auch das europäische ATV an.
- Destiny
- Das Destiny-Modul (englisch für „Schicksal“, „Vorsehung“) ist das amerikanische Labormodul der ISS. Es bietet insgesamt Platz für 24 Racks, die für Experimente, Steuerungseinheiten oder als Stauraum genutzt werden können. Im Labor werden Experimente auf den Gebieten Mikrogravitation, Lebenswissenschaften, Biologie, Ökologie, Erderkundung, Weltraumforschung und Technologie durchgeführt.
- Quest
- Quest (englisch für „Streben“, „Suche“) ist die amerikanische Luftschleuse der ISS. Sie ermöglicht das Verlassen der Station in amerikanischen Raumanzügen für Wartungs- und Reparaturarbeiten außerhalb der ISS. In der Luftschleuse werden auch die amerikanischen Raumanzüge sowie Werkzeuge für den Außenbordeinsatz gelagert.
- Pirs
- Pirs (russisch Пирс für Pier) oder Docking Compartment (DC) ist die russische Luftschleuse. Sie wird für Ausstiege in russischen Orlan-Anzügen benutzt. Im Gegensatz zu Quest kann Pirs jedoch auch als Kopplungsadapter für anfliegende Sojus-Raumschiffe oder Progress-Frachter genutzt werden.
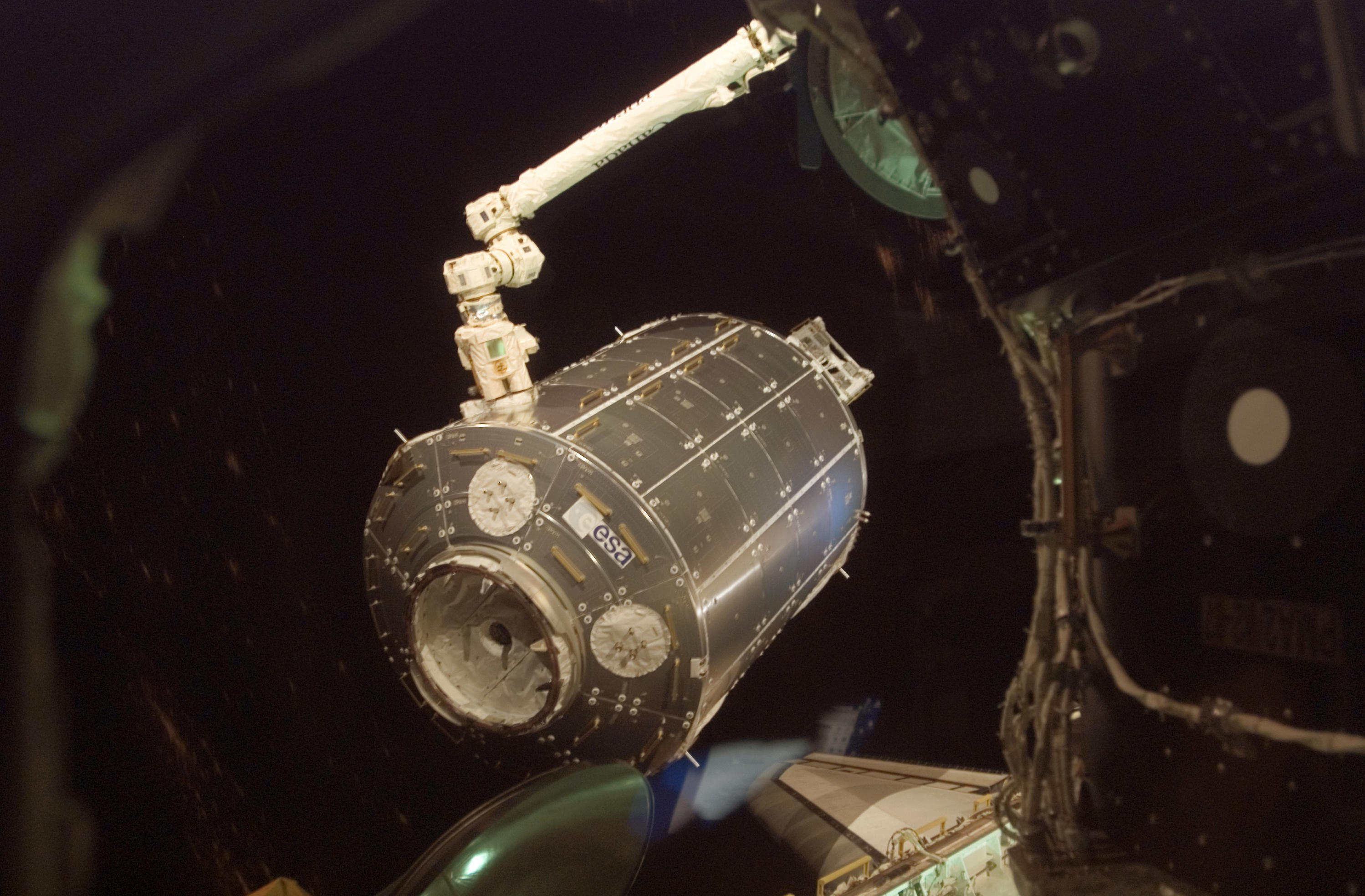
 Columbus wird aus der Ladebucht der Atlantis gehievt
Columbus wird aus der Ladebucht der Atlantis gehievt- Harmony
- Harmony (Node 2) (englisch für „Harmonie“, „Eintracht“) ist ein Verbindungsknoten, der am Destiny-Modul angedockt ist. Er bietet weitere Anschlussmöglichkeiten für das Kibō-Modul, das Columbus-Modul sowie für MPLM-Module bzw. HTV-Transporter. Es verfügt über acht Racks, die zur Versorgung der Station mit Luft, Elektrizität und Wasser dienen sowie andere lebensnotwendige Systeme enthalten oder als Stauraum fungieren.
- Columbus
- Columbus ist das europäische Labormodul der ISS. Es enthält Platz für insgesamt zehn Racks, die unter anderem für Experimente der Material- und Biowissenschaften sowie der Flüssigkeitsforschung genutzt werden sollen.
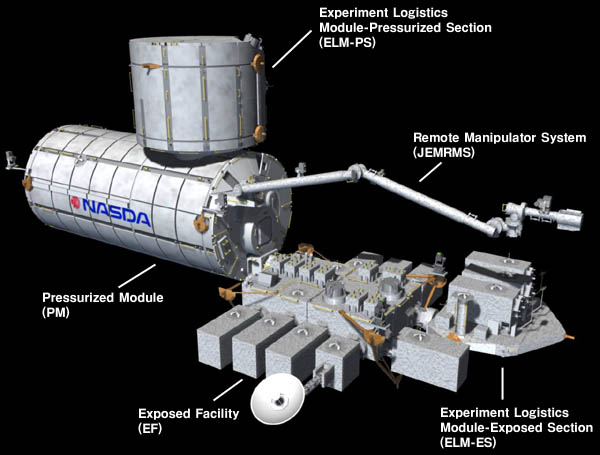
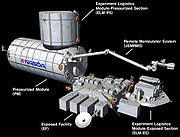 Die Kibō-Komponenten (Illustration)
Die Kibō-Komponenten (Illustration)- Kibō
- Der japanische Beitrag zur ISS heißt Kibō (japanisch für „Hoffnung“). Das System besteht aus vier Modulen, von denen drei mit den Missionen STS-123 und STS-124 bereits ins All gebracht wurden.
- Das Experiment Logistics Module (ELM) steht unter Druck und ist am Zenitpunkt von Kibō angekoppelt. Es kann jedoch mit Fracht gefüllt werden und wie ein MPLM mit dem Space Shuttle zur Erde gebracht werden, wurde aber für den ständigen Aufenthalt im All an Kibō konzipiert.
- Das Pressurized Module (PM); das unter Druck stehende Hauptmodul ist etwa so groß wie das amerikanische Destiny-Labor - es wiegt insgesamt knapp 16 Tonnen. Am Ende des Moduls befindet sich eine kleine Druckluke, um Experimente von der Plattform zu bergen oder dort anzubringen.
- Das Remote Manipulator System (JEMRMS) ist der zehn Meter lange Roboterarm, mit dem Experimente auf die Plattform gebracht werden können oder von dort geborgen werden. Er besteht aus einem Hauptarm für größere Massen und einem Spezialarm, der am großen Arm angedockt werden kann. Der Spezialarm kann nur kleine Massen bewegen, dies dafür aber mit einer sehr hohen Genauigkeit.
Nicht unter Druck stehende Module
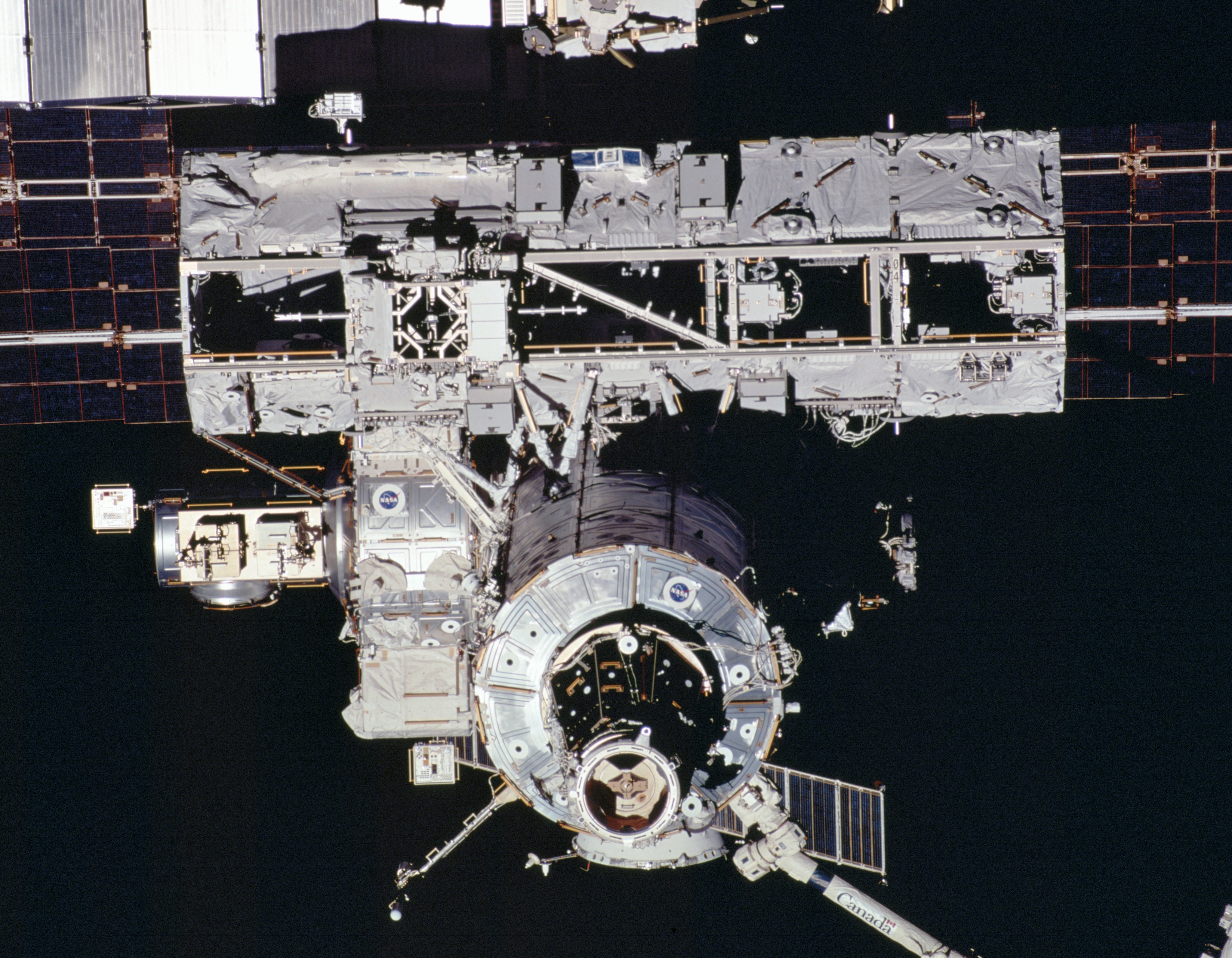
 ISS nach Installation des Elements S0
ISS nach Installation des Elements S0- Integrated Truss Structure
- Das eigentliche Gerüst der Station wird Integrated Truss Structure genannt. Es ist senkrecht zur Flugrichtung ausgerichtet und besteht aus elf Elementen. Die Elemente P1, P3/P4, P5 und P6 sind in Flugrichtung links angeordnet (von engl. portside für Backbord). Auf der rechten Seite ("S" wie engl. starboard für Steuerbord) werden die Elemente S1, S3/S4, S5 und S6 genannt. Das Element S0 liegt in der Mitte und ist über das Destiny Labor mit dem bewohnten Teil der Station verbunden. Das P6-Element war das erste der vier großen amerikanischen Solarmodule und wurde zunächst oberhalb des Z1-Elements angebracht. Im Rahmen der STS-120-Mission wurde es an seiner endgültigen Position am P5-Element befestigt. Die Elemente P2 und S2 waren ursprünglich als Antriebselemente gedacht, wurden aber durch die russische Beteiligung an der Station überflüssig.
- Solarmodule
- Neben den kleineren Solarzellen an den russischen Modulen, die vor allem zu Baubeginn genutzt wurden, hat die ISS vier große Solarelemente. Diese sind an den Elementen P6 und P4 auf der linken bzw. S6 und S4 auf der rechten Seite angebracht. Die Elemente können um zwei Achsen gedreht werden, um immer optimal auf die Sonne ausgerichtet zu sein.
- Heat Rejection System (HRS) und Photovoltaic Radiator (PVR)
- Überschüssige Wärme wird über Abstrahler abgeführt. Dreireihige Abstrahler finden sich auf den zentralen Truss-Elementen S1 und P1. Zusätzlich gehört zu jedem Solarmodul ein kleinerer Abstrahler. Die Radiatoren bilden die logischen Gegenstücke zu den Solarpanel, die der Station Energie zuführen und verhindern damit einen Hitzestau in der Station.
 Astronaut Steve Robinson wird während der STS-114 vom Canadarm2 getragen
Astronaut Steve Robinson wird während der STS-114 vom Canadarm2 getragen- Canadarm2
- Der Roboterarm der Station wird (in Anlehnung an den Canadarm des Shuttles) Canadarm2 oder SSRMS (Space Station Remote Manipulator) genannt. Der Arm kann eine Masse von bis zu 100 Tonnen bewegen und wird vom Innern des Destiny-Labors aus gesteuert. Dazu stehen vier Kameras zur Verfügung - direkter Blickkontakt ist also nicht notwendig. Der Arm ist nicht an einer festen Stelle der Station montiert, sondern kann mit einem von mehreren Konnektoren, die über die ganze Station verteilt sind, befestigt werden. Dazu hat der Arm an beiden Enden eine Greifmechanik. Zudem kann der Arm auf den Mobile Transporter gesetzt und so auf Schienen die Gitterstruktur entlanggefahren werden.
- Dextre
- Dextre ist der Spitzname der „Roboterhand“, deren technische Bezeichnung Special Purpose Dexterous Manipulator (SPDM) lautet. Das mit zwei Armen und Händen ausgestattete Element kann als Endstück für den Roboterarm der Station genutzt werden, ist aber auch davon unabhängig einsetzbar. Dextre verfügt über sehr viele Gelenke und Vorrichtungen, zum Beispiel ausfahrbare Inbusschlüssel. Damit können auch komplexere Arbeiten außerhalb der Station ohne die Hilfe der Astronauten vorgenommen werden.
Zukünftige Module
- Exposed Facility (EF)
- Eine Plattform für Experimente im freien Weltraum. Sie gehört zum japanischen System Kibō und wird an der Stirnseite des Pressurized Module befestigt und kann mit einer recht großen Zahl von Experimenten bestückt werden. Die Plattform soll 2009 mit der Shuttle-Mission STS-127 zur Station gebracht werden.
- Mini Research Module 2
- Im November 2009 soll das russische Mini-Research Module 2 (MRM2) mit einer Sojus-Rakete zur ISS gebracht werden. Das MRM2 ist nahezu baugleich mit der Luftschleuse Pirs und wird diese ergänzen oder sogar ersetzen. Zusätzlich wird MRM2 auch für externe wissenschaftliche Experimente verwendet, wovon es auch seinen Namen bekommt. MRM2 soll am Swesda-Modul angekoppelt werden.[11]
- Tranquility
- Tranquility ist ein Verbindungsknoten, der am Unity-Verbindungsknoten angedockt wird. Er enthält Systeme zur Wasser- und Luftaufbereitung, zusätzlichen Stauraum sowie Koppelungsstutzen zum Andocken von weiteren Modulen. Tranquility soll zusammen mit der Aussichtsplattform Cupola im Dezember 2009 mit der Shuttle-Mission STS-130 zur ISS gebracht werden.
- Cupola
- Cupola ist ein Aussichtsfenster mit einem Durchmesser von knapp drei Metern und einer Höhe von 1,5 Meter. Cupola hat sechs große seitliche Fenster sowie ein großes Dachfenster mit 80 Zentimeter Durchmesser. Cupola wird im Dezember 2009 zur ISS gebracht und am Tranquility-Modul befestigt.
- Docking Cargo Module
- Das Docking Cargo Module (oder Mini Research Module - MRM1) soll im April 2010 mit der Shuttle-Mission STS-132 zur ISS gebracht und an das Sarja-Modul angedockt werden. Dort soll es einen zusätzlichen Andockplatz für Sojus- und Progress-Schiffe bereitstellen, um die ab 2009 steigende Anzahl dieser Schiffe bedienen zu können.
- Multipurpose Laboratory Modul
- Das russische Labormodul (MLM, russisch Многоцелевой лабораторный модуль - МЛМ für Mehrzweck-Labor-Modul) soll Ende 2011 mit einer Proton-M-Rakete zusammen mit dem European Robotic Arm zur ISS gebracht werden. Nach Meldungen vom 9. November 2007 wurde der Start auf 2011 verschoben [12][13]. Das Modul soll sowohl Platz für wissenschaftliche Experimente bieten, als auch Lagerräume und Räume für die Mannschaft enthalten. Es soll außerdem über Triebwerksysteme verfügen, die zur Lagekorrektur der Station eingesetzt werden können.
- European Robotic Arm
- Der European Robotic Arm ist ähnlich wie Canadarm2 ein Roboterarm. Er verfügt im Gegensatz zum Canadarm2 jedoch über Greifmechanismen, die für den russischen Teil der ISS ausgelegt sind. Der Arm hat eine Länge von über 11 Metern und kann mit einer Genauigkeit von unter 5 mm etwa 8 Tonnen positionieren. Der European Robotic Arm soll Ende 2011 mit einer russischen Proton-Rakete zur ISS gebracht werden.
- Expedite the Processing of Experiments to the Space Station (ExPRESS) Logistics Carrier
- Die ExPRESS Logistics Carrier (ELC) werden zusätzliche Experimentierfläche im luftleeren Raum bieten. Gemäß heutiger Planung sollen die Module ELC-1 und ELC-2 mit der Shuttle Mission STS-129 Endeavour im Jahr 2009 an der ISS installiert werden. Mit der Mission STS-133 Endeavour wird das zweite Paar ELC-3 and ELC-4 angebracht. ELC-5 wurde zu Gunsten des MRM1 abgesagt.
Gestrichene Module
- Habitation Module
- Das Habitation Module sollte ein etwa zehn Meter langes Modul sein, das nur zum Wohnen gedacht war. Zu ihm gehörten vier Schlafecken, eine Dusche sowie eine Küchennische. Das Modul wurde u.a. mit der Begründung nicht fertiggestellt, es sei für eine etwa siebenköpfige Crew ausgelegt gewesen, durch die Nichtrealisierung des Crew Return Vehicle, das als Rettungsfahrzeug für sieben Personen genutzt werden sollte, könnten aber niemals sieben Personen auf der ISS dauerhaft leben. Allerdings sollen sich nach aktuellem Stand in Zukunft trotzdem immerhin sechs Personen dauerhaft auf der ISS aufhalten; dies mit zwei dreisitzigen Sojus-Landekapseln als Notevakuierungssysteme. Insofern wäre das Habitation Module dennoch sehr gut brauchbar gewesen. Die treibende Kraft bei der Einstellungsentscheidung dürften also wohl vor allem Kostenerwägungen gewesen sein.
- Research Module
- Die Research Module sollten einen großen Teil des russischen Labortraktes ausmachen. Zu den Forschungsgebieten gehörten Geowissenschaft, Astronomie, Biologie und Medizin. In den ersten Planungen war von drei Modulen die Rede, 1998 gab es nur noch zwei Module, die jedoch in den Plänen von September 2001 ebenfalls fehlten.
- Science Power Platform
- Die Science Power Platform (SPP) sollte Strom für die russischen Komponenten liefern. Zusätzlich wurde es mit Steuerdüsen ausgestattet, die die Umlaufbahn der ISS korrigieren sollten. Das russische System sollte mit der Mission STS-138 an der ISS andocken.
Es wurde gestrichen, da weitere russische Module ebenfalls nicht realisiert wurden, und somit die Energie der großen amerikanischen Solarzellenflächen völlig ausreicht.
- Centrifuge Accommodations Module
- Das Centrifuge Accommodations Module CAM sollte regelbare Schwerkraft für Experimente zur Verfügung stellen. Das Modul hätte zum amerikanischen Segment der Station gehört, wurde jedoch von Japan im Gegenzug für Transport des Kibō-Moduls zur ISS gebaut. Wegen fehlender Mittel wird dieses Modul von der NASA aber nicht mehr zur ISS gebracht.
 Der Rettungsgleiter X-38 während eines Testfluges
Der Rettungsgleiter X-38 während eines Testfluges- Crew Return Vehicle (X-38)
- Die X-38 ist ein flügelloser Lifting Body (Auftriebskörper), der im Notfall die Evakuierung der Internationalen Raumstation ermöglichen sollte. Der Gleiter bietet Platz für sieben Personen und ist mit einer Antriebseinheit zum Verlassen der Umlaufbahn ausgestattet. Es war geplant, dass ständig ein solches Crew Return Vehicle (zu deutsch: Mannschafts-Rückkehrfahrzeug) an der ISS angedockt ist. Wegen zu hoher Kosten wurde die Entwicklung des X-38 jedoch 2002 eingestellt. Die Evakuierungmöglichkeit wird zum jetzigen Zeitpunkt durch die Sojus-Raumschiffe sichergestellt. Nach dem Erhöhen der Besatzung auf sechs Personen sollen es zwei solcher Raumschiffe sein. Weil eine Sojus-Landekapsel maximal drei Personen befördern kann, wird die ISS die ursprünglich geplante Besatzungsstärke von sieben Raumfahrern nicht erreichen können. Die offizielle Bezeichnung für den Prototyp des Fahrzeuges, der mehrmals in der Atmosphäre geflogen ist, lautet zwar X-38, oft spricht man jedoch einfach von dem „Crew Return Vehicle“, obwohl diese Bezeichnung auch allgemein für Rettungsfahrzeuge dieser Art verwendet wird.
Energieversorgung
.jpg) ein Solarelement der ISS in der Nahaufnahme
ein Solarelement der ISS in der NahaufnahmeDie Stromversorgung der Raumstation geschieht ausschließlich über Sonnenenergie. Der amerikanische Teil der ISS verfügt – im Endausbau – über acht Solarpaneele. Diese sind in vier sogenannten Photovoltaic Modules (PVMs) zu je zwei Elementen zusammengefasst, die durch Rotationsgelenke auf die Sonne ausgerichtet werden. An beiden Enden des „Rückgrats“ der ISS werden sich nach der Fertigstellung jeweils zwei Module befinden; auf der Backbordseite sind es die mit P4 und P6 bezeichneten Elemente und an Steuerbord S4 und S6.
Die acht Solarelemente arbeiten unabhängig voneinander. Während ein Teil des Stroms zur Speicherung in die Akkumulatoren (Nickel-Wasserstoff-Zellen) geleitet wird, geht der andere Teil direkt zu den zahlreichen Verbrauchern. Dazu wird der Strom über vier MBSU-Verteiler (Main Bus Switching Units) geleitet. Um eine gleichmäßige Energieversorgung auf der gesamten Station zu gewährleisten, kann eine MBSU über Kreuzschaltungen mit jeder anderen MBSU verbunden werden.
Zwei Paneele speisen einen Verteiler, der die Stromleitungen splittet und vier Leitungen ausgibt, die die Energie in DDCU-Gleichstromrichtern (Direct current–to–Direct Current Converter Units) herunterregeln. Anschließend wird die elektrische Energie durch ein verzweigtes Leitungsnetz an jedes Element des amerikanischen Teils der ISS verteilt. Die Sonnenkollektoren erzeugen eine Spannung von 160 Volt (Primary Power), die Verbraucher auf dem US-Teil der Station arbeiten jedoch mit 124 Volt Gleichspannung (Secondary Power) und einige Geräte auch mit 28 Volt.
Die Sonnenenergie des russischen Teils der Raumstation wird in Nickel-Cadmium-Akkus gespeichert, wobei alle Geräte mit 28 Volt Gleichspannung arbeiten. Über Konverter kann elektrische Energie zwischen den amerikanischen und russischen Systemen ausgetauscht werden.
Die Ausrichtung der Solarelemente hatte einen relativ hohen Einfluss auf den Luftwiderstand der Station. Durch den Nachtgleitmodus kann der Widerstand im Mittel um 30 % reduziert werden und pro Jahr etwa 1000 kg Treibstoff eingespart werden.
Kühlung
 Abstrahler und Solarpanel
Abstrahler und SolarpanelÜberschüssige Hitze von bis zu 106,8 kW kann über das Kühlsystem in den Weltraum abgegeben werden. Dazu dienen zwei Arten von Radiatorengruppen:
- Das zentrale heat rejection system (HRS) mit zwei dreireihigen Kühlgruppen befindet sich auf den zentralen Strukturen S1 und P1. Jede Kühlgruppe strahlt maximal 35 kW über die 24 Kacheln auf einer Gesamtfläche von 22 m × 10 m ab und hat ein Gewicht von 3,7 Tonnen.
- Die photovoltaic radiators (PVR) befinden sich zusätzlich zu den Solarzellen auf den Elementen P4, P6, S4 und S6. Sie strahlen je 9 kW über sieben Kacheln auf einer Fläche von 13 m × 3,4 m ab und haben ein Gewicht von 0,8 Tonnen.
Beide Typen werden bei Lockheed-Martin hergestellt[14] und zusammengefaltet mit dem Space Shuttle in den Weltraum gebracht. Als Kältemittel dient flüssiger Ammoniak.
Datenübertragung
Die Datenübertragung und der Sprechfunkverkehr mit dem Kontrollzentrum erfolgt für den amerikanischen Teil der Station über das TDRS-Netz über S-Band (192 kbps) und Ku-Band (bis 300 Mbps). Die Kommunikation mit Astronauten während Außenbordeinsätzen sowie dem Shuttle wird über ein UHF-System hergestellt.
Der russische Teil der Station benutzt das dem TDRS ähnliche LUCH-Netz, um mit dem russischen Kontrollzentrum in Moskau zu kommunizieren.
Kosten
Wie viel das Projekt insgesamt kosten wird, ist umstritten. Nachdem die NASA beim Anfangsbetrag von 40 Milliarden US-Dollar diverse Korrekturen nach oben vornehmen musste, gibt sie heute keine neuen Kostenschätzungen mehr heraus. Nach Angaben der ESA werden sich die Gesamtkosten auf etwa 100 Milliarden Euro belaufen. Darin enthalten sind Entwicklung, Aufbau und die ersten zehn Jahre der Nutzung. 8 Milliarden Euro davon entfallen auf die Länder der ESA.[15]
NASA (Vereinigte Staaten)
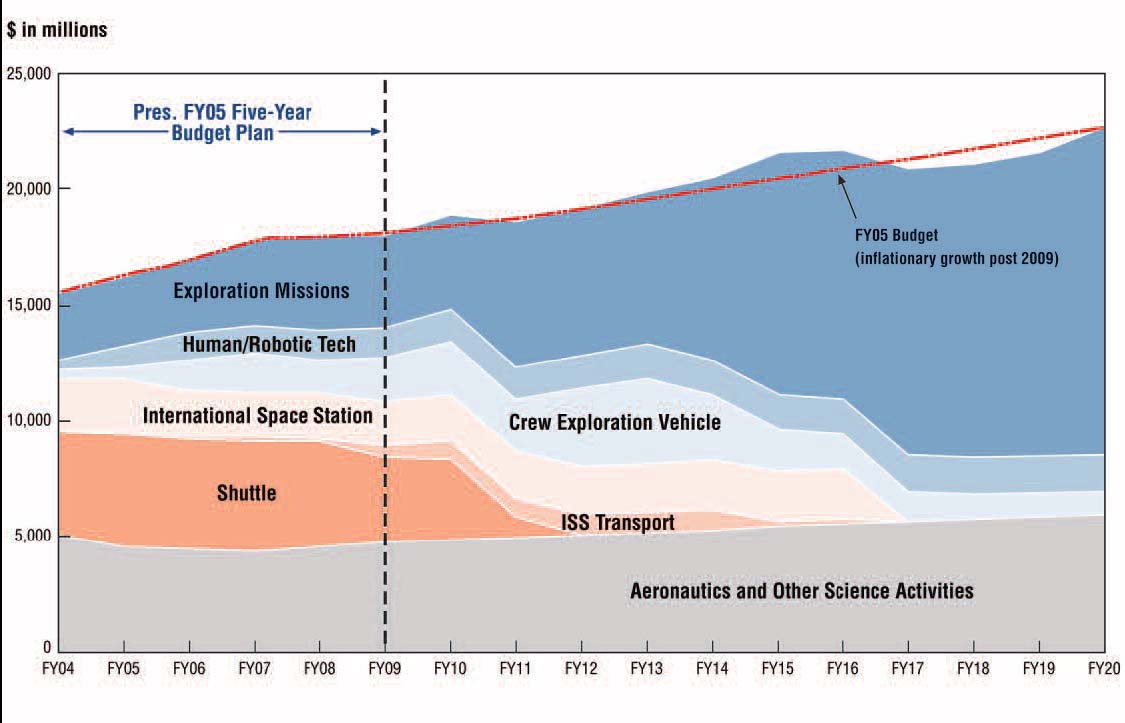
Das NASA-Budget für 2007[16] vermerkt Kosten für die ISS (exklusive der Shuttle-Kosten, die einen separaten Posten bilden) in Höhe von 25,6 Milliarden Dollar für die Jahre 1994 bis 2005. Für 2005 und 2006 wurden 1,7 respektive 1,8 Milliarden Dollar bereitgestellt. Der jährliche NASA-Beitrag wird bis 2010 auf wahrscheinlich 2,3 Milliarden Dollar ansteigen und von da an auf diesem Niveau bleiben, bis 2017 das kalkulierte Ende des Programms eintritt.
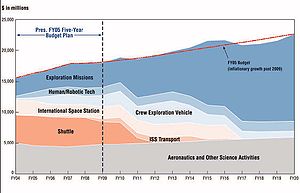 Verteilung des Budgets der NASA 2004–2020
Verteilung des Budgets der NASA 2004–2020Die 1,8 Milliarden Dollar des Budgets von 2005 verteilen sich wie folgt: [17]
- Entwicklung neuer Hardware: In diesem Segment wurden lediglich 70 Millionen Dollar bereitgestellt, um Navigationssysteme oder Datenverarbeitung voranzutreiben.
- Spacecraft Operations: Insgesamt 800 Millionen Dollar entfallen auf diesen Bereich, die sich in je 125 Millionen für die Bereiche Software, Außensysteme sowie Logistik und Wartung aufteilen. 150 Millionen wurden für Flüge, Avionik und Crewsysteme ausgegeben, die restlichen 250 Millionen waren für allgemeinen ISS-Betrieb.
- Launch and Mission operations: Obwohl die Shuttleflüge nicht Teil des ISS-Budgets sind, tauchen „mission and mission integration“ mit 300 Millionen Dollar, medizinische Leistungen mit 25 Millionen und Shuttle-Startvorbereitungen mit 125 Millionen in den Kosten auf.
- Operations Program Integration: 350 Millionen Dollar gab die NASA für Erhalt und Bereitstellung von Flug- und Bodenhard- und -software in den USA aus, um die Integrität des ISS-Designs und den sicheren Betrieb zu garantieren.
- ISS Fracht/Crew: In diesem Bereich wurden lediglich 140 Millionen Dollar für den Kauf von Nachschub, Fracht und Crewausrüstung von Sojus- und Progress-Flügen bereitgestellt.
Wenn die Projektionen der NASA über jährlich 2,5 Milliarden Dollar zwischen 2011 und 2016 zutreffen und 2017 wie geplant der Betrieb eingestellt werden würde, würden sich die Gesamtkosten seit dem Beginn des Programms 1993 auf 53 Milliarden Dollar aufsummiert haben. Die 33 Shuttle-Flüge für die Konstruktion und die Versorgung der Raumstation werden weitere 35 Milliarden Dollar gekostet haben. Zusammen mit den Vorarbeiten der NASA beim Design für die geplanten, aber nie realisierten Vorläuferstationen der ISS kann davon ausgegangen werden, dass allein die NASA näherungsweise 100 Milliarden Dollar für die Internationale Raumstation ausgegeben haben wird.
ESA (Europa)
Die ESA kalkuliert ihren Beitrag über die 30-jährige Gesamtdauer des Projekts mit 8 Milliarden Euro. Die Kosten für die Entwicklung des Columbus-Moduls betrugen knapp 1 Milliarde (in dieser Höhe zum Teil hervorgerufen durch viele Änderungen und aufgezwungene Managementstrukturen). Der weitaus größere Teil der Kosten wird für die operative Phase benötigt (Betrieb des europäischen Bodenzentrums, Fertigung/Lagerhaltung für Ersatzteile, Mietkosten für Datenübertragungsstrecken usw).
Die Entwicklung des ATV kostete inklusive des ersten Starts von Jules Verne 1,35 Milliarden Euro. Die vier weiteren geplanten Flugexemplare sind mit 875 Millionen Euro günstiger, da die Entwicklungskosten nun wegfallen. Da jeder Flug einer Ariane-5-Rakete wenigstens 125 Millionen Euro kostet, sind für ATV-Flüge Kosten in Höhe von 2,85 Milliarden Euro zu erwarten.
ATV-Kosten für die Flüge werden zum Teil mit der NASA, für die durch Columbus anfallenden Nutzungskosten der Stationsressourcen, verrechnet.
JAXA (Japan)
Das Kibō-Laboratorium hat bereits 2,8 Milliarden Dollar gekostet. Hinzu kommen die jährlichen Betriebsausgaben des Moduls im Bereich zwischen 350 und 400 Millionen.
Roskosmos (Russland)
Ein erheblicher Betrag des Budgets der russischen Weltraumbehörde Roskosmos wird für die ISS aufgewendet. Seit 1998 führte Roskosmos über zwei Dutzend Sojus- und Progress-Flüge durch, das primäre Vehikel für Crew- und Transportmissionen. Die Gesamtkosten sind schwierig abzuschätzen. Die bereits im Orbit befindlichen russischen Module sind Nachkömmlinge des Mir-Designs, so dass die Entwicklungskosten hierfür immerhin sehr viel niedriger als bei vielen anderen Bestandteilen des Projektes sind.
CSA (Kanada)
Kanada, deren Hauptbeitrag zur Internationalen Raumstation das Modul Canadarm2 ist, beziffert seine Kosten für das Projekt über die vergangenen 20 Jahre mit 1,4 Milliarden Kanadischen Dollar.[18]
Funkname
Der Funkname lautete lange Zeit Station. Während der ISS-Expedition 14 begann jedoch der Astronaut Lopez-Alegria mit der Verwendung des Namens Alpha (in Anlehnung an die amerikanische Bezeichnung der Station während der frühen Planungsphase), was dann von Houston und anderen Astronauten übernommen wurde. Nach seinem Aufenthalt auf der Station kehrte man aber zum alten Rufnamen Station zurück. Mittlerweile wird im Funkverkehr wieder Alpha verwendet.
Zeitrechnung
Im Gegensatz zu zeitlich begrenzten Raumflügen, auf denen die Zeit gemäß Mission Elapsed Time (MET) gemessen wird, werden für die Raumstation alle Zeiten in Koordinierter Weltzeit (UTC) angegeben. Zur Anpassung an die Hauptarbeitszeiten in den Kontrollzentren wird der Tagesablauf aber häufig dagegen verschoben. Für die Öffentlichkeitsarbeit in Zusammenhang mit der ISS verwendet die NASA eine Mischung aus Zeitangaben in Pacific (PST/PDT), Central (CST/CDT) und Eastern Time (EST/EDT).
Beobachtung der Station von der Erde aus
 ISS von der Erde aus betrachtet (Scheinbare Helligkeit von -4.5mag)
ISS von der Erde aus betrachtet (Scheinbare Helligkeit von -4.5mag)Die ISS erreicht eine scheinbare Helligkeit von bis zu etwa −5 mag [19], d. h., sie erscheint bei günstiger Phase und wenn sie nahe am Zenit vorbeizieht, von der Erde aus etwa 25-mal heller als der hellste Stern namens Sirius, mit −1,44 mag. (Zum Vergleich: die Venus, der hellste Planet, kann bis zu −4,7 mag hell werden).
Mit den weiteren Modulen, die in Zukunft noch angedockt werden, erhöht sich die reflektierende Fläche der Station, so dass die ISS noch etwas höhere Helligkeitsklassen erreicht.
Die ISS ist jeweils periodisch zu bestimmten Zeiten im Jahr von Mitteleuropa aus am Himmel zu sehen: Zunächst während zwei bis drei Wochen nahezu täglich in der Morgendämmerung, dann, nach einigen Tagen (hier abhängig von der Jahreszeit) Pause, zwei bis drei Wochen in der Abenddämmerung. Nach knapp zwei Monaten wiederholt sich diese Abfolge. Bei sternklarer Sicht kann man dann die ISS ohne Hilfsmittel als zügig vorbeiziehenden hellen Punkt ausmachen. Die genauen Zeitpunkte für eine optimale Sicht, sowie u.a. die jeweilige Himmelsrichtung des Auftauchens, sind online abrufbar (siehe Heavens-Above oder calsky unter Weblinks).
Forschungsprojekte auf der ISS
- Abgestimmte Atomuhrgruppe im Weltraum (ACES)
- Alpha-Magnet-Spektrometer (AMS)
- European Technology Exposure Facility (EuTEF)
- Rubidium Atomic Clock Experiment (RACE)
- Solar Monitoring Observatory (Solar)
- Global Transmission Service (GTS)
- Primäre Atomreferenzuhr im Weltraum (PARCS) – abgesagt
- Analysing Interferometer for Ambient Air (ANITA)
Einzelnachweise
- ↑ a b c Aktuelle Flughöhe: [1]
- ↑ ISS-Partnerländer verlängern Betriebszeit der Raumstation. RIA Novosti, 5. Februar 2009. Abgerufen am 6. Februar 2009.
- ↑ RP Online: Freedom – Alpha – ISS
- ↑ Spaceflight Now: Space Shuttle Launch Manifest, 3. August 2006 (englisch)
- ↑ International Space Station, NSSDC ID: 1998-067A. NSSDC. Abgerufen am 8. Dezember 2008. (englisch)
- ↑ Raumfahrer.net: Multi Purpose Logistics Module (MPLM), 25. August 2003
- ↑ Jaxa: H-II Transfer Vehicle, 26. Juni 2006 (englisch)
- ↑ NASA: NASA to Open New Competition for Space Transportation Seed Money (18. Oktober 2007, englisch)
- ↑ NASA: Commercial Crew & Cargo Program Overview, 11.01.2007 (PDF, 1 MB, englisch)
- ↑ NASA: Zarya Module
- ↑ Docking Compartment-1 and 2. Abgerufen am 26. März 2009.
- ↑ Kommersant: ISS to Have 3 New Modules of Russia by 2011 (englisch)
- ↑ RIA novosti: Russland ergänzt sein ISS-Segment mit drei Modulen
- ↑ Lockheed Martin: Heat Rejection Radiators (HRS)
- ↑ ESA: How much does it cost?, 9. August 2005 (englisch)
- ↑ NASA: FY 2007 Budget Request, Februar 2006 (PDF-Format, 660 KB, englisch)
- ↑ NASA: International Space Station Major Events FY 2005, Januar 2004 (PDF-Format, 403 KB, englisch)
- ↑ CSA: International Space Station facts and figures, Januar 2005 (englisch)
- ↑ Calsky Satellitenbeobachtung von der Erde aus
Siehe auch
- Liste der ISS-Module
- Liste der Raumfahrer auf der Internationalen Raumstation
- Liste bemannter Missionen zur Internationalen Raumstation
- Liste unbemannter Missionen zur Internationalen Raumstation
- Liste der ISS-Abkürzungen
Weblinks
- ISS-Seite der NASA (englisch)
- Virtuelle Tour durch die ISS – NASA (englisch)
- ISS-Seite des DLR
- Raumfahrer.net – große ISS-Rubrik
- Interaktive Animation des Aufbaus der ISS mit Zeitschiene
- Animationsvideo, das den Aufbau der ISS zeigt (nach den Planungen vom April 2006)
- Heavens-Above – Übersicht über die Beobachtungsmöglichkeiten der ISS (englisch)
- Heavens-Above – Aktuelle Beobachtungsmöglichkeiten der während STS-126 weggedrifteten Werkzeugtasche (englisch)
- Calsky – Umfangreiche Seite zur Bahnberechnung von Satelliten (Mit Sternenkarte)
- ISS-Link für Unterricht und Schule auf dem NRW-Bildungsserver
- Telepolis: Quo VadISS? – Die Odyssee der Internationalen Raumstation
- Fotos der NASA zur ISS – auch in hoher Auflösung
- Realtime Data Orbital Tracking der NASA – Echtzeitverfolgung der Flugbahn der ISS
- Satellite Sighting Information – Zeiten und Orte der ISS und Shuttles am Nachthimmel über Deutschland
- ARISS Europa – Amateurfunk in der Internationalen Raumstation
- NASA: Reference Guide to the International Space Station Stand: Juli 2006
- Der deutsche Astronaut Prof. Dr. Ulrich Walter über Bau, Betrieb und Zukunft der ISS
 Module der Internationalen Raumstation
Module der Internationalen RaumstationSarja · Unity · PMA · Swesda · Integrated Truss Structure · Destiny · ESP · Mobile Servicing System · Canadarm2 · Quest · Pirs · Harmony · Columbus · Kibō (ELM-PS + PM) · Canada Hand
Noch zu startende Module: Kibō (EF) · MLM · ERA · Tranquility · Cupola · DCM · MRM-2 · ELC
Gestrichene Module: CAM · Habitation Module · ICM · IPM · Research Modules · SPP · UDM · DSM · MPM Enterprise · Crew Return Vehicle

Zubringer: STS-88 · STS-96 · STS-101 · STS-106 · STS-92 · Sojus TM-31 · STS-97 · STS-98 · STS-102 · STS-100 · Sojus TM-32 · STS-104 · STS-105 · Sojus TM-33 · STS-108 · STS-110 · Sojus TM-34 · STS-111 · STS-112 · Sojus TMA-1 · STS-113 · Sojus TMA-2 · Sojus TMA-3 · Sojus TMA-4 · Sojus TMA-5 · Sojus TMA-6 · STS-114 · Sojus TMA-7 · Sojus TMA-8 · STS-121 · STS-115 · Sojus TMA-9 · STS-116 · Sojus TMA-10 · STS-117 · STS-118 · Sojus TMA-11 · STS-120 · STS-122 · STS-123 · Sojus TMA-12 · STS-124 · Sojus TMA-13 · STS-126 · STS-119 · Sojus TMA-14 · Sojus TMA-15 · STS-127 · STS-128 · Sojus TMA-16 · STS-129 · Sojus TMA-17 · STS-130 · STS-131 · STS-132 · STS-133 · STS-134
Langzeitbesatzungen: Expedition 1 · Expedition 2 · Expedition 3 · Expedition 4 · Expedition 5 · Expedition 6 · Expedition 7 · Expedition 8 · Expedition 9 · Expedition 10 · Expedition 11 · Expedition 12 · Expedition 13 · Expedition 14 · Expedition 15 · Expedition 16 · Expedition 17 · Expedition 18 · Expedition 19 · Expedition 20 · Expedition 21

Dieser Artikel befindet sich derzeit im Review-Prozess. Sag auch dort deine Meinung und hilf mit, den Artikel zu verbessern!






.jpg)




.jpg)


Wikimedia Foundation.