- Synchron-Reluktanzmotor
-
Ein Synchron-Reluktanzmotor ist eine Drehstrom-Synchronmaschine mit einem Rotor (Läufer), der einen sog. Flusssperrenschnitt aufweist. Der Stator (Ständer) des Synchron-Reluktanzmotors weist, wie bei anderen Drehstrommaschinen drei räumlich um je 120° versetzte Spulen auf, die von dreiphasiger Wechselspannung gespeist werden. In diesem vom Ständer erzeugten Drehfeld weist der Rotor aufgrund längs des Umfangs unterschiedlicher magnetischer Leitfähigkeit Vorzugsrichtungen auf. Das Drehmoment wird bei diesem Motor aufgrund der Reluktanzkraft durch die Vorzugsrichtungen hervorgerufen und nicht wie bei anderen elektrischen Maschinen zufolge der Lorentzkraft.
Der Rotor dreht sich wie bei allen Synchronmotoren synchron mit dem Drehfeld des speisenden Spannungsnetzes. Die Drehzahl ist über die Polpaarzahl mit der Frequenz der Wechselspannung verknüpft. In der Praxis sind Synchron-Reluktanzmotoren meistens 4-polig ausgeführt, können bei entspr. höherer Frequenz des Netzes trotzdem bei mechanischen Drehzahlen von 3000 bis 4200 oder mehr Umdrehungen pro Minute laufen.
Inhaltsverzeichnis
Historie
Das Prinzip des Reluktanzmotors mit der Anisotropie der magnetischen Leitfähigkeit im Läufer ist lange bekannt. 1923 erhält J. K. Kostko ein Patent [1]. Verschiedene Hersteller bieten Reluktanzmotoren zum Betrieb direkt am Netz an. Der Läufer hat meist eine Kurzschlussanlaufwicklung zum asynchronen Selbstanlauf. Dieser Motortyp findet aber nur in Nischen – z.B. in der Textilindustrie - Anwendung. 1998 gelingt Vagati die Optimierung der Rotorgeometrie in einer Weise, dass die Drehmomentwelligkeit und die Geräuschemission systematisch deutlich reduziert sind.
Aufbau und Arbeitsweise
Der Stator (Ständer) eines Synchron-Reluktanzmotors hat den gleichen Aufbau wie der eines handelsüblichen 4-poligen Asynchronmotors mit verteilten Wicklungen. Der Rotor (Läufer) ist zur Vermeidung von Wirbelströmen ein Blechpaket aus Elektroblechen, die eine besondere Blechschnittgeometrie mit Flussleit- und Flusssperrabschnitten aufweisen (Bild 1). Die in den Ständernuten verteilte Wicklung erzeugt bei Speisung mit einem Drehstrom ein im Luftspalt des Motors umlaufendes Drehfeld. Bei Speisung über einen Frequenzumrichter lässt sich die Drehzahl von Null bis zur Betriebsdrehzahl hochführen und während des Betriebs verstellen. Beim Einschalten des Umrichters synchronisiert sich der Läufer und fällt "in Tritt" und folgt synchron dem umlaufenden Drehfeld. Über eine geeignete Rotorlageregelung im Frequenzumrichter wird sichergestellt, dass insb. bei Lastwechseln der Rotor nicht außer Tritt fällt.
 Blechschnitt eines 4-poligen Synchron-Reluktanzmotors gemäß U.S.-Patent von Vagati [2]
Blechschnitt eines 4-poligen Synchron-Reluktanzmotors gemäß U.S.-Patent von Vagati [2]
In der magnetischen Vorzugsrichtung (d-Richtung) tritt ein geringer magnetischer Widerstand auf und der magnetische Fluss wird im Eisen gut geführt. Rechtwinkelig dazu (q-Richtung) behindern die Luftsperren den magnetischen Fluss. Die d- und q-Richtung entsprechen den Koordinatensystem wie bei der D/q-Transformation. Wird die Ständerwicklung bestromt, so entstehen im Läufer Pole und Lücken. Synchronisiert sich der Läufer, so sind seine Pole quasi über eine Feder (vgl. Federmodell im Artikel Polrad) mit den Polen des Drehfeldes verbunden. Bei Belastung bleibt der Läufer etwas zurück und es entsteht ein Polradwinkel, der bei Entlastung wieder verschwindet.
 Drehmomenterzeugung
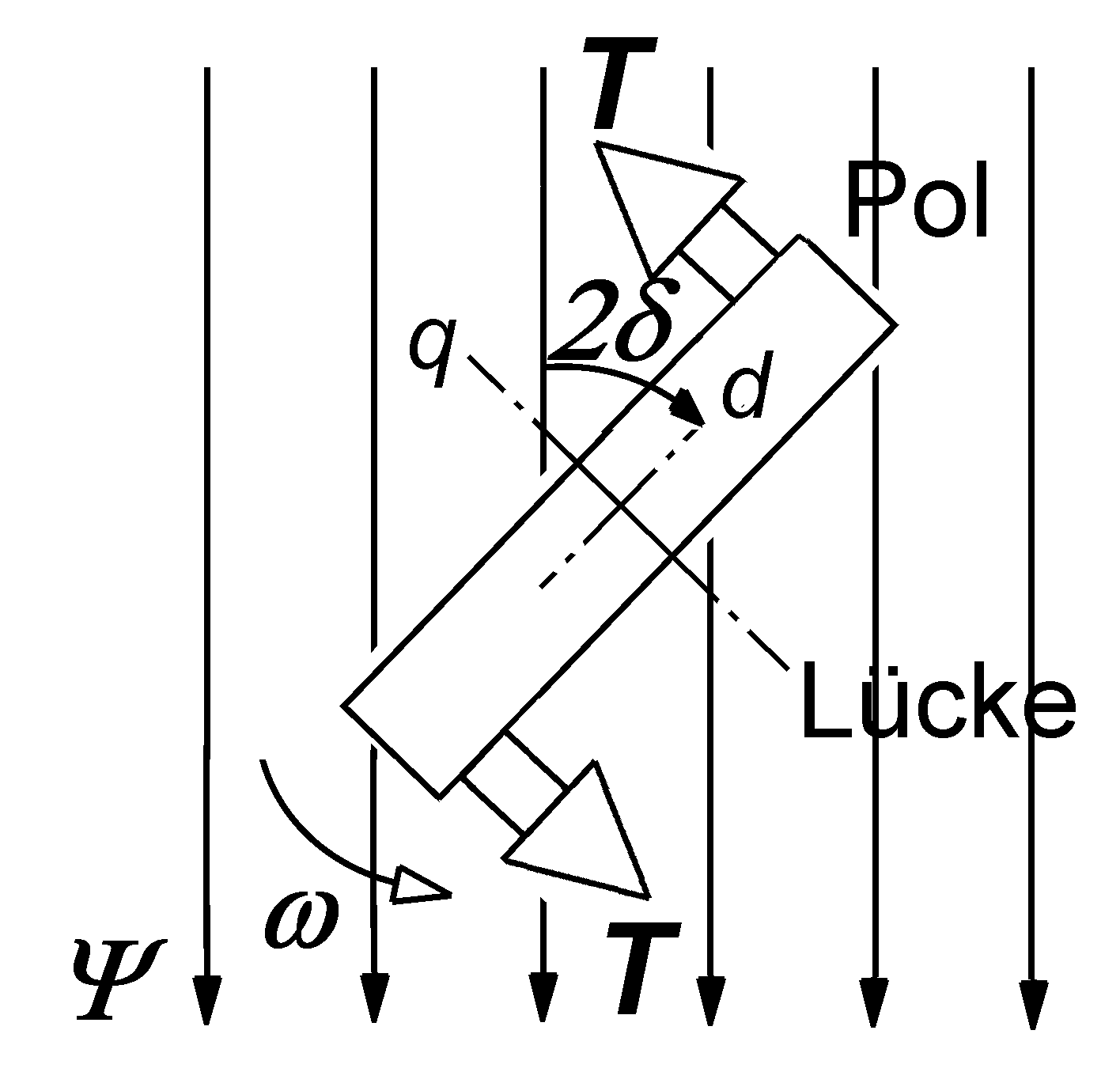
DrehmomenterzeugungIm Bild ist das Prinzip der Drehmomententstehung genauer gezeigt. Befindet sich ein Streifen Eisenblech in einem Magnetfeld, so versucht es sich in die Richtung der Feldlinien zu drehen und eine energetisch möglichst günstige Position parallel zu den Feldlinien einzunehmen. Dreht man es aus dieser Position heraus, so entsteht ein Drehmoment M. Gleiches passiert im Motor. Bei Belastung im Motorbetrieb bleibt das Polrad kurzzeitig etwas hinter dem umlaufenden Drehfeld zurück und es entsteht der belastungsabhängige Polradwinkel δ (delta). Ist die Belastung zu groß, fällt der Motor "außer Tritt" und bleibt stehen.
Drehmoment
Das Drehmoment M des Synchron-Reluktanzmotors lässt sich aus den Motordaten berechnen. Man erhält es zu:
mit der Motorkonstante k, den Induktivitäten in q- und d-Richtung Lq und Ld, dem magnetischen Fluss Ψ und dem Polradwinkel δ. Die Formel zeigt, dass das Verhältnis Lq/Ld möglichst klein sein muss, um ein großes Drehmoment M zu erhalten.
Je besser also die Flussführungen in der d-Achse arbeiten und je stärker der Fluss in der q-Achse behindert wird, desto größer ist das Motordrehmoment.
Vor- und Nachteile
Aufgrund der Massenträgheit des Rotors und der unbedingten synchronen Betriebsweise kann der Synchron-Reluktanzmotor nur mit einem Frequenzumrichter betrieben werden. Aufgrund moderner Regelungstechnik ist die Drehzahlregelung heute jedoch ohne Resolver (Rotorlagegeber) möglich. Ein Nachteil sind somit die um die Kosten des Umrichters erhöhten Investitionskosten. Die Ausfallwahrscheinlichkeit ist aufgrund des robusten Aufbaus gegenüber einer geregelten Asynchronmaschine nicht erhöht. Beim Sychron-Reluktanz-Motor treten nahezu keine Verluste im Läufer auf. Dadurch hat er zwei wesentliche Vorteile. Erstens einen besseren Wirkungsgrad als herkömmliche Asynchronmotoren und zweitens wegen der geringeren Verluste auch eine geringere Erwärmung im Läufer und bei den Lagern. Die Wicklungsverluste im Ständer sind wegen des höheren Magnetisierungsanteils im Ständer etwas höher. Durch die in der Summe geringeren Verluste ist mit dem Motor die internationale Effizienzklasse IE4 erreichbar, deren genauer Verlauf über der Nennleistung nach heutigem Stand im CD (Committee Draft) der IEC 60034-30 Ed. 2 festgelegt ist. Durch diese Eigenschaft haben Synchron-Reluktanzmotoren seit 2009 erneut Bedeutung bei der Anwendung in sog. Rotating Equipment erlangt. Bei der Herstellung ist gegenüber permanentmagneterregten Synchronmotoren vorteilhaft, dass keine Magnetwerkstoffe auf Basis sog. Seltene Erden-Werkstoffe Verwendung finden, die von der europäischen Kommission 14 im Rahmen ihrer "Rohstoffinitiative“ als besonders „kritische Metalle“ eingestuft wurden[3].
Einzelnachweise
- ↑ J. K. Kostko, "Polyphase reaction synchronous motors", J. Amer. Inst. Elec. Ing., Bd. 42, S. 1162–1168, Nov. 1923
- ↑ A. Vagati, "Synchronous reluctance electrical motor having a low torque ripple design", U.S. Patent No. 5818140, Oct. 6, 1998.
- ↑ Hintergrundpapier Seltene Erden, Stand: Januar 2011, Öko-Institut e.V., Büro Berlin, Schicklerstraße 5-7, 10179 Berlin
Literatur
- Peter F. Brosch, FH Hannover Fakultät I, 30459 Hannover, Zeitschrift Elektrotechnik, Ausg. Juni 2011, S. 36ff
- T. A. Lipo, “Synchronous reluctance machine, a viable alternative for AC-drives,” Elect. Mach. Power Syst., Bd. 19, S. 659–671, 1991.
- T. J. E. Miller, A. Hutton, C. Cossar, D. A. Staton, “Design of a synchronous reluctance motor drive,” IEEE Trans. Ind. Appl., Bd. 27, Nr. 4, S. 741–749, Jul. 1991.
- I. Boldea, L. Tutelea, C. I. Pitic, “PM-assisted reluctance synchronous motor/generator (PM-RSM) for mild hybrid vehicles: Electromagnetic design,” IEEE Trans. Ind. Appl., Bd. 40, Nr. 2, Sp. 492–498, März/Apr. 2004.
- M.-I. Lamghari-Jamal, J. Fouladgar, E.-H. Zaim, D. Trichet, “A magneto-thermal study of a high speed synchronous reluctance machine,” IEEE Trans. Magn., Bd. 42, Nr. 4, S. 1271–1274, Apr. 2006.
- T.A. Lipo, P. C. Krause, “Stability analysis of a reluctance synchronous machine,” IEEE Trans. Power Appl. Syst., Bd. PAS-86, Nr. 7, S. 825–834, Jul. 1967.
- A. J. O. Cruickshank, R. W. Menzies, A. F. Anderson, “Axially laminated anisotropic rotors for reluctance motors,” IEE Proc., Bd. 113, Nr. 12, S. 2058–2060, 1966.
- D. Platt, “Reluctance motor with strong rotor anisotropy,” IEEE Trans. Ind. Appl., Bd. 28, Nr. 3, S. 652–658, Mai 1992.
- H. Hofmann, S. R. Sanders, “High-speed synchronous reluctance machine with minimized rotor losses,” IEEE Trans. Ind. Appl., Bd. 36, Nr. 2, S. 531–539, Mai 1992.
- J. Kolehmainen, “Rotor for electric machine,” Patent FI 118 940 (B1), 15. Mai 2008.
- J.Kolehmainen, J. Ik¨aheimo, “Motors with buried magnets for medium speed applications,” IEEE Trans. Energy Convers., Bd. 23, Nr. 1, S. 86– 91, März 2008.
- J. Kolehmainen, “Machine with a rotor structure supported only by buried magnets,” presented at the Int. Symp. Electromag. Fields Elect. Eng. (ISEF), Prague, Czech Republic, Sept. 2007.
- S. Wiak, A. Krawczyk, I. Dolezel, Eds., “Advanced computer techniques in applied electromagnetics,” Bd. 30, in Studies in Applied Electromagnetics and Mechanics. Amsterdam, The Netherlands: IOS Press, 2008, S. 240–246.
- X. B. Bomela, M. J. Kamper, “Effect of stator chording and rotor skewing on average torque and torque ripple of reluctance synchronous machine,” in Proc. IEEE Africon 1999, Bd. 2, S. 678–690.

![M = k \left[ \frac{1}{L_q} - \frac{1}{L_d} \right] \Psi^2 \sin 2\delta](f/6ffab5dc18f01bc884514a29a599e9c0.png)
Wikimedia Foundation.