- Getriebemotor
-
 Absperrklappe mit Getriebemotor
Absperrklappe mit Getriebemotor
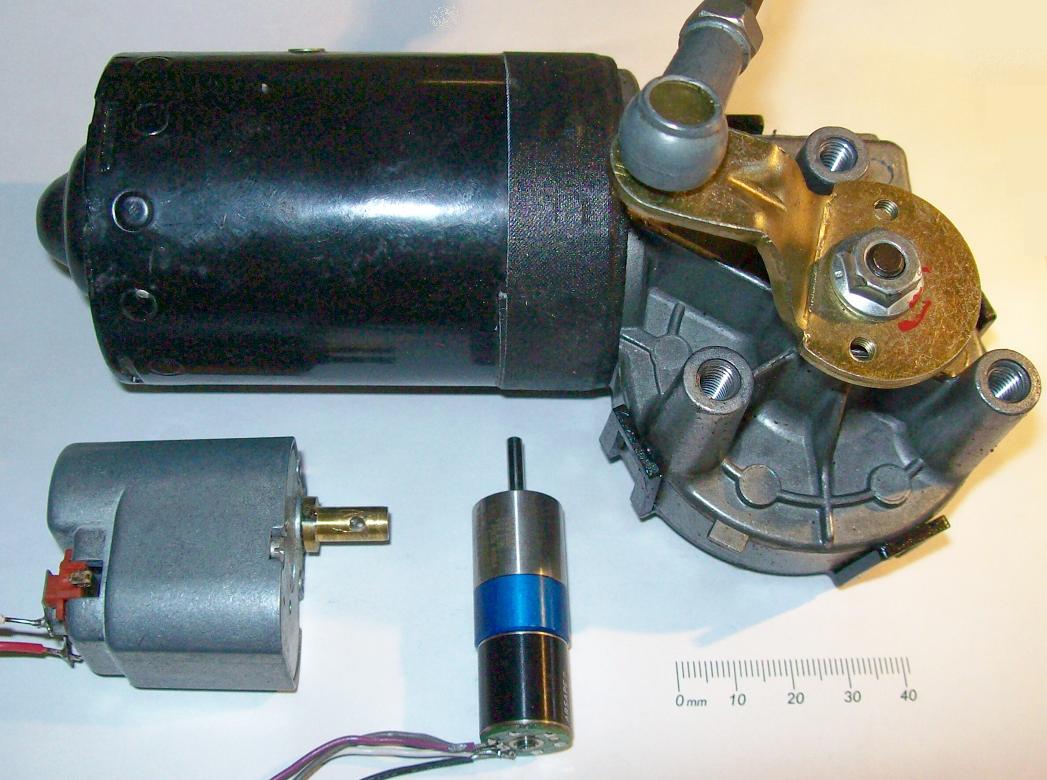
 Getriebemotoren: oben: Getriebemotor mit Schneckentrieb; links: mit Stirnradgetriebe; Mitte unten: mit Planetengetriebe
Getriebemotoren: oben: Getriebemotor mit Schneckentrieb; links: mit Stirnradgetriebe; Mitte unten: mit PlanetengetriebeEin Getriebemotor ist eine Kombination aus einem Motor, meist einem Elektromotor, und einem Getriebe, das dafür sorgt, dass sich die Abtriebswelle in den meisten Fällen mit geringerer Geschwindigkeit, aber wesentlich höherem Drehmoment als diejenige des Motors dreht. 1927 konstruierte Albert Obermoser den Vorläufer der Getriebemotoren, den patentierten Vorgelegemotor. Dazu versah er einen Elektromotor mit einem Getriebe - das Grundprinzip des heute üblichen Getriebemotors war gefunden. Seither erlebte der Getriebemotor eine Fülle an Verbesserungen. Heute sind Einheiten aus Motor, Getriebe plus kompletter Elektronik verfügbar. Das erlaubt effektive dezentrale Antriebe.
Motoren und Getriebe bilden eine konstruktive Einheit - das Getriebe ist direkt angebaut oder sogar im gleichen Gehäuse untergebracht.
Da Elektromotoren bei höherer Drehzahl eine geringere Masse besitzen als solche gleicher Abgabeleistung mit niedriger Drehzahl und viele Antriebe im Allgemeinen nicht so hohe Drehzahlen benötigen, ist eine Getriebeuntersetzung in den meisten Fällen sinnvoll.
Direktantriebe, d. h. ohne ein Getriebe arbeitende Antriebe, besitzen jedoch in einigen Fällen Vorteile - es tritt kein Spiel auf und die Verluste des Getriebes entfallen. Als Beispiel sei die Motorspindel genannt.
Als Über- bzw. Untersetzung i eines Getriebes wird grundsätzlich das Drehzahlverhältnis der Antriebsdrehzahl zur Abtriebsdrehzahl verstanden. Neben i sind der Wirkungsgrad, das maximale Drehmoment am Abtrieb, das Spiel, die Maximaldrehzahl und die maximale axiale und radiale Wellenbelastung (Kraft) wichtige Parameter eines Getriebemotors.
Getriebearten (ein- oder mehrstufig), die in Getriebemotoren vorwiegend zum Einsatz kommen:
- Schneckengetriebe : Achse der Abtriebswelle senkrecht zur Motor-Drehachse
- Stirnradgetriebe: Achse der Abtriebswelle parallel, jedoch versetzt zur Motor-Drehachse
- Planetengetriebe: Achse der Abtriebswelle gleicht der Motor-Drehachse
- Kegelradgetriebe : Achse der Abtriebswelle senkrecht zur Motor-Drehachse
Zu unterscheiden sind weiterhin Schwenkantriebe und Drehantriebe. Bei einem Drehantrieb dreht sich die angetriebene Welle beliebig oft, bei einem Schwenkantrieb weniger als eine volle Umdrehung.
Ein Merkmal von Getriebemotoren ist auch, ob sie selbsthemmend oder nicht selbsthemmend sind, das heißt, ob das Drehen der Abtriebswelle bei stromlosem Motor möglich ist. Bei Stirnradgetrieben und Planetenradgetrieben geringer Untersetzung ist das oft der Fall, Schneckengetriebe sind in der Regel selbsthemmend.
Getriebemotoren werden in der Technik beispielsweise als Stellantriebe für Armaturen, in Antrieben (Scheibenwischer, Roboter, Zustellantriebe, Rollladen, Jalousien usw.). Sie sind oft mit einem genormten Flansch ausgestattet, mit dem sie gegebenenfalls über eine Kupplungslaterne (Wellrohrkupplung) mit der anzutreibenden Welle verbunden werden können. Manchmal haben Getriebemotoren ein kuppelbares Handrad, damit das anzutreibende Bauteil notfalls auch von Hand betätigt werden kann.
Literatur
- Bonfiglioli Riduttori S.p.A. (Hrsg.): Handbuch der Getriebemotoren. Springer Verlag, Berlin, Heidelberg, New York, 1997, ISBN 3-540-60977-6.
 Verschiedene GetriebemotorenKategorie:
Verschiedene GetriebemotorenKategorie:- Getriebetechnik


Wikimedia Foundation.