- Kismet (Roboter)
-
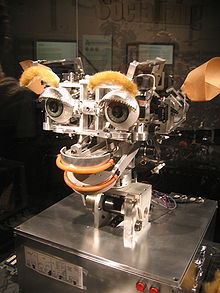
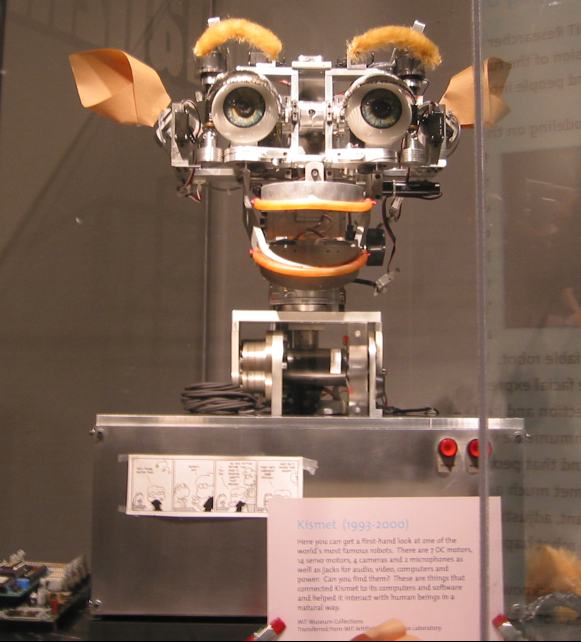
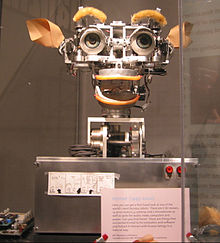 Kismet ist heute ein Ausstellungsobjekt im MIT-Museum in Cambridge, Massachusetts (USA)
Kismet ist heute ein Ausstellungsobjekt im MIT-Museum in Cambridge, Massachusetts (USA)
 Kismet
KismetKismet ist ein humanoider Roboter aus den 1990er Jahren. Er stammt vom Massachusetts Institute of Technology (MIT) und besteht aus einem Kopf mit Halspartie. Der Roboter war ein beliebtes Objekt für verschiedenste Medien und erlangte internationale Bekanntheit. Im Jahre 2000 wurde die Forschungsarbeit mit Kismet eingestellt, seitdem fungiert er als Ausstellungsstück im MIT-Museum.
Inhaltsverzeichnis
Eigenschaften und Konzipierung
Kismet kann mit Menschen interagieren und simuliert menschliche Emotionen. Er verfügt über sieben Gefühlskategorien: Ruhig, angewidert, verärgert, traurig, interessiert, glücklich und überrascht. Seine Technik konzentriert sich auf Schlüsselelemente zwischenmenschlicher Handlungen.
Hauptziel war es, ein offenes lernendes System zu entwickeln bzw. weiterzuentwickeln, welches Stück für Stück menschliche Reaktionen entwickeln kann. Das System orientiert sich an den sozialen Eigenschaften menschlicher Kinder. Kismet diente nicht für Interaktionen zwischen Robotern untereinander, sondern für Interaktionen mit Menschen.
Technik
Sensoren
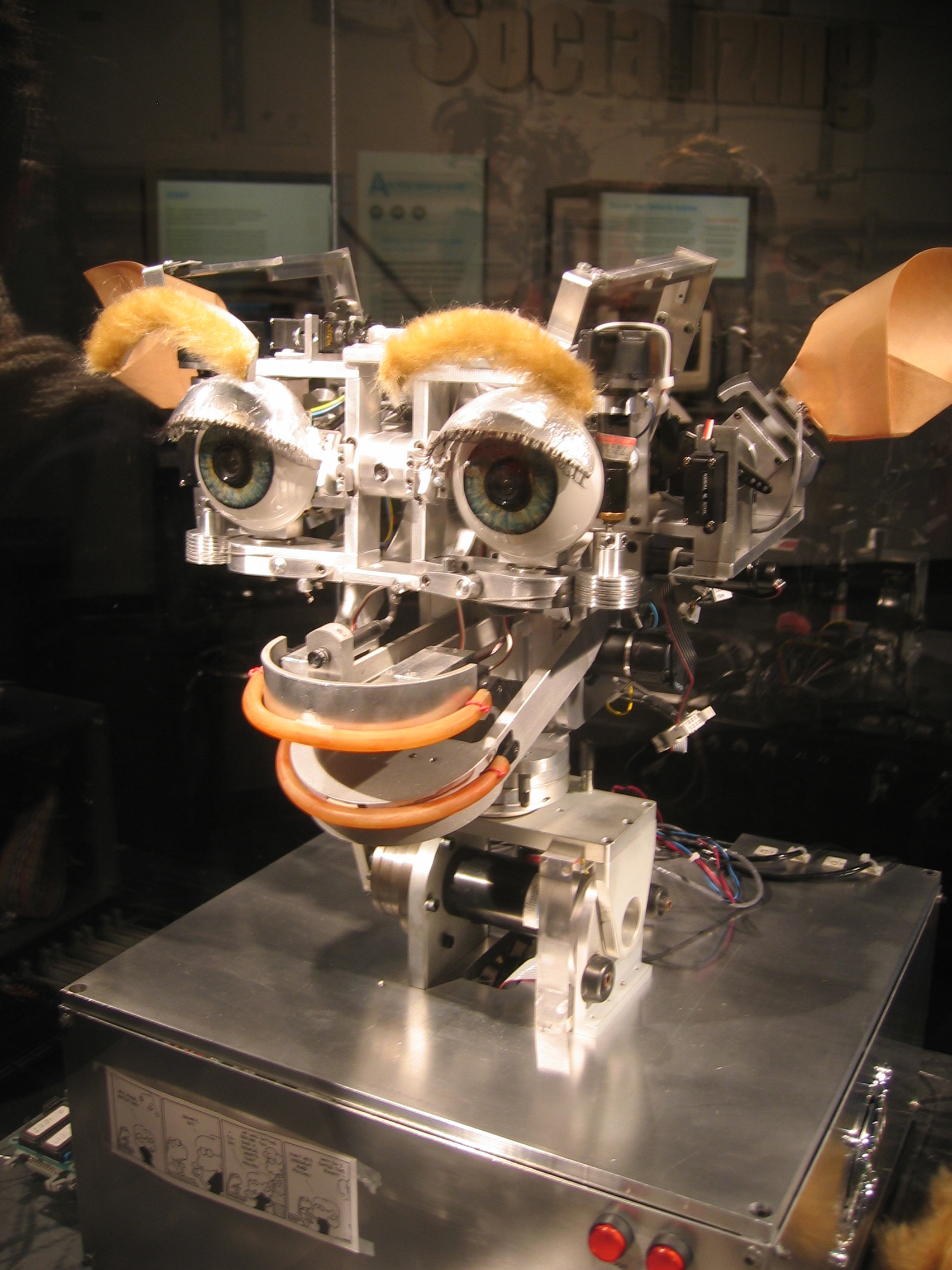
Vier hoch auflösende Kameras dienen als optische Sensoren. Hinter jedem Augballen befindet sich je eine Kamera, eine weitere zwischen den Augen und die vierte in der Nasenpartie. Die Kameras registrieren Entfernung und Mimik von Menschen. Für die akustischen Signale befindet sich an der Halspartie ein Lavalier-Mikrofon, das diese zum auditiven System leitet und zur Spracherkennung dient.
Bewegungen und Mimik
Kismet verfügt über insgesamt 21 Motoren für das Kopf- und Halssystem. Jeder dieser Motoren ermöglicht Bewegungen. Der Roboter hat drei Freiheitsgrade für den Hals, drei Freiheitsgrade pro Auge, vier für die Lippen, zwei für jedes Ohr, zwei für jede Augenbraue und einen für jedes Augenlid (zum Öffnen und Schließen der Augenlider).
Prozessoren
Vom Roboter selbst leiten Kabel zu einem zugehörigen Rechner-Netzwerk. Es besteht aus 15 Prozessoren, die auf vier verschiedenen Betriebssystemen laufen. Davon dienen allein neun Rechner für das visuelle System, also um die Gesichtsausdrücke der Menschen zu erkennen. Diese Rechner laufen auf einem QNX-System (eine Unix-Variante). Vier weitere Prozessoren modellieren die emotionalen Grundzustände. Sie sind außerdem zuständig für Verhaltensweisen und komplexere Wahrnehmungen. Diese vier Rechner laufen auf dem Betriebssystem Linux.
Ein Rechner verarbeitet das Sprachsignal. Dabei konzentriert man sich stärker auf die emotionalen Färbungen in der Stimme als auf Sprachlaute (Phoneme) oder den Sprachinhalt. Der Sprachrechner läuft ebenfalls auf einem Linux-System. Ein weiterer Rechner synthetisiert die Sprache. Er gestaltet Kismets Sprache emotional, also z. B. fröhlich, traurig oder überrascht. Dieser Rechner läuft auf einem NT-Betriebssystem.
Systemische Komponenten
Kismets Systemarchitektur besteht aus sechs Untersystemen. Diese Module bilden keine einfache Kette von den sensorischen Eingängen bis zu den Reaktionen. Sie stehen in verschiedenen, teils gegenseitigen Wechselbeziehungen zueinander. Die sechs Komponenten sind: die grobe Extraktion (engl. low-level feature extraction system), die komplexe Extraktion (engl. high-level perception system), das Aufmerksamkeitssystem (engl. attention system), das Motivationssystem (engl. motivation system), das Verhaltenssystem (engl. behavior system) und das motorische System (engl. motor system). Das Motivationssystem hat zwei Untersysteme, nämlich das homöostatische System und das Emotionssystem. Das motorische System enthält mit dem Vokalsystem, dem System für Gesichts- und Körperpositionen sowie dem Orientierungssystem für Kopf und Augen drei Untersysteme.
Weblinks
- Kismet – Homepage von Kismet (MIT)
- Radio Akademie – Biotopien – SWR-Bericht über Kismet
- The Real Transformers – Bericht der New York Times über Kismet
Wikimedia Foundation.