- Huboter
-
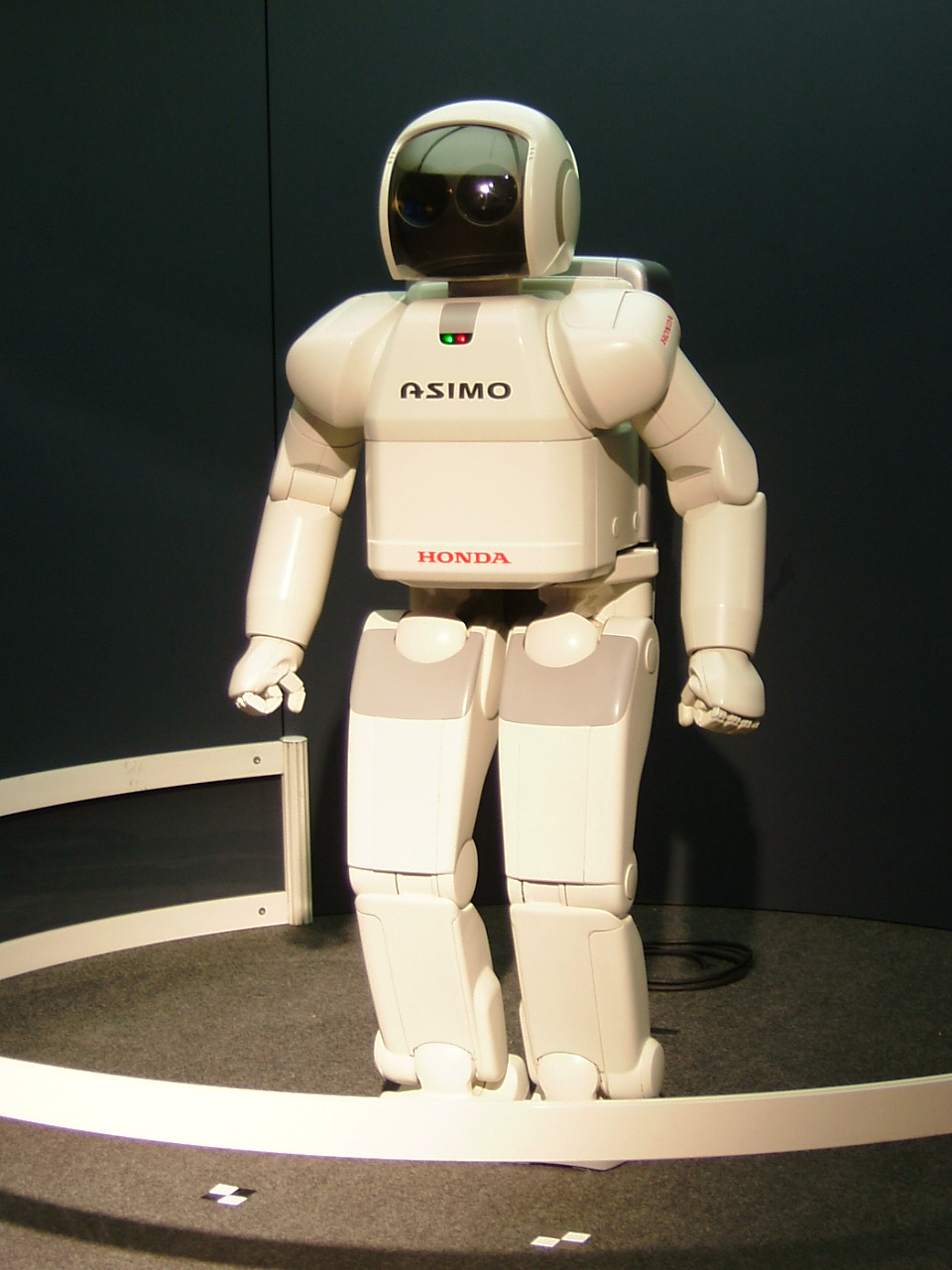
 Humanoider ASIMO
Humanoider ASIMO Der an der Universität Tokyo entwickelte humanoide Roboter Kotaro
Der an der Universität Tokyo entwickelte humanoide Roboter KotaroEin humanoider Roboter ist in ein Roboter, dessen Konstruktion der menschlichen Gestalt nachempfunden ist. Häufig sind die Positionen der Gelenke und die Bewegungsabläufe eines humanoiden Roboters von den menschlichen Gelenkpositionen und Bewegungsabläufen inspiriert. Unter anderem läuft ein humanoider Roboter meistens auf zwei Beinen. Eine dem Menschen in seinem Aussehen und Verhalten besonders ähnliche Form des humanoiden Roboters ist der Android.
Inhaltsverzeichnis
Geschichte
Die Idee des Baus eines künstlichen Menschen, der insbesondere harte, gefährliche oder eintönige Arbeit erledigen kann, ist alt. Die griechische Mythologie berichtet, dass der Schmiedegott Hephaistos u.a. menschenähnliche Maschinenwesen gebaut habe. 1495 skizziert Leonardo da Vinci einen simplen Automaten, der wie ein Soldat in Rüstung aussieht. 1738 baut Jacques de Vaucanson einen mechanischen Flötenspieler. Bis zu diesem Zeitpunkt bezeichnet man solche mechanischen, menschenähnlichen Maschinen als Automaten.
Den Begriff Roboter prägt 1921 erstmals Karel Čapek, ein tschechischer Schriftsteller, in seinem Theaterstück R.U.R. (Rossum's Universal Robots), das über künstliche Menschen handelt. Abgeleitet ist der Begriff Roboter dabei vom slawischen Wort rabota, das Arbeit bedeutet. 1927 schafft Fritz Lang in seinem Film Metropolis Maria, den ersten Roboter der Filmgeschichte. Eine prototypische Realisierung, den humanoiden Roboter Elektro, stellt 1939 die Firma Westinghouse auf der Weltausstellung in New York vor.
1970 schlägt Miomir Vukobratović das Zero-Moment-Point-Prinzip vor. Mit Hilfe dieses Prinzips können die Bedingungen für statisch stabiles Laufen erfüllt werden. 1973 baut die Waseda-Universität den Wabot-1 und beginnt ein langjähriges Forschungsprogramm. 1980 wird das MIT Leglab gegründet. 1984 spielt der Wabot-2 auf einer elektrischen Orgel. Seit 1986 arbeitet Honda an der E-Serie, aus der später die P-Serie und Asimo hervorgehen. Parallel dazu werden seit circa 1990 passiv dynamische Läufer entwickelt, bei denen ein neuerer Ansatz für das Laufen verwendet wird. Seit ca. 2004 laufen, gehen und rennen Roboter schneller und flexibler.
Forschung und Entwicklung
Der Entwicklung humanoider Roboter liegen zwei Hauptmotive zugrunde:
Künstliche Intelligenz
Heute gehen viele Wissenschaftler davon aus, dass die Konstruktion eines funktionellen humanoiden Roboters die Grundlage für die Erschaffung einer menschenähnlichen, künstlichen Intelligenz ist. Nach dieser Auffassung kann K.I. nicht einfach programmiert werden, sondern resultiert aus einem Lernprozess. Diesem Standpunkt liegen Beobachtungen aus der Lernpsychologie zugrunde. Der Roboter mit K.I. soll aktiv am sozialen Leben des Menschen teilnehmen und durch Beobachtung, Interaktion und Kommunikation lernen. Grundlage der Kommunikation ist eine zugrundeliegende Motivation auf beiden Seiten, die zumindest anfänglich der in der Eltern-Kind-Beziehung ähnelt. Die K.I. des Roboters kann sich nur dann optimal entwickeln, wenn er bereits in seinem Mindestfunktionsumfang als gleichwertiges Wesen anerkannt wird. Dazu muss er über eine menschliche Gestalt, Mobilität und Sensorik verfügen. Das derzeitige Grundziel in der Erschaffung der K.I. ist demnach eine möglichst hochwertige technische Kopie menschlicher Physiologie. Diese besondere technologische Herausforderung führt dazu, dass es für komplexe Teilaspekte separate Forschungsgruppen gibt, die einander zuarbeiten. Beispiele sind am Massachusetts Institute of Technology das Leg Laboratory, das Humanoider-Roboter-Projekt COG und das K.I.-Projekt Kismet.
Multifunktionale Arbeitsmaschine
Kostenintensive kommerzielle oder staatliche geförderte Humanoide-Roboter-Projekte beweisen eine hohe Erwartungshaltung an die zukünftige Wirtschaftlichkeit solcher Systeme. Der Lebensraum des Menschen (Gebäude, Verkehrsmittel, Werkzeuge oder Geräte) ist aus Kostengründen ökonomisch ausgerichtet und orientiert sich besonders an der menschlichen Physiologie. Eine in Serie gefertigte Anzahl lernfähiger multifunktionaler humanoider Roboter erübrigt die Produktion, den Vertrieb und die Unterhaltung vieler Spezialroboter. Besonders Tätigkeiten, die aus mehreren komplizierten Arbeitsgängen bestehen, ließen sich einfach erledigen. Dem Menschen soll ein multifunktionaler Helfer zur Seite stehen, der ihm in seinem Umfeld Arbeit oder Zeit erspart oder für Unterhaltung sorgt. Japan hat ebenso wie Deutschland eine starke Alterung der Bevölkerung. Man hofft, durch den konsequenten Einsatz von diesen Alleskönnern Senioren im Alltag zu unterstützen oder Pflegepersonal zu entlasten.
Aktueller Entwicklungsstand
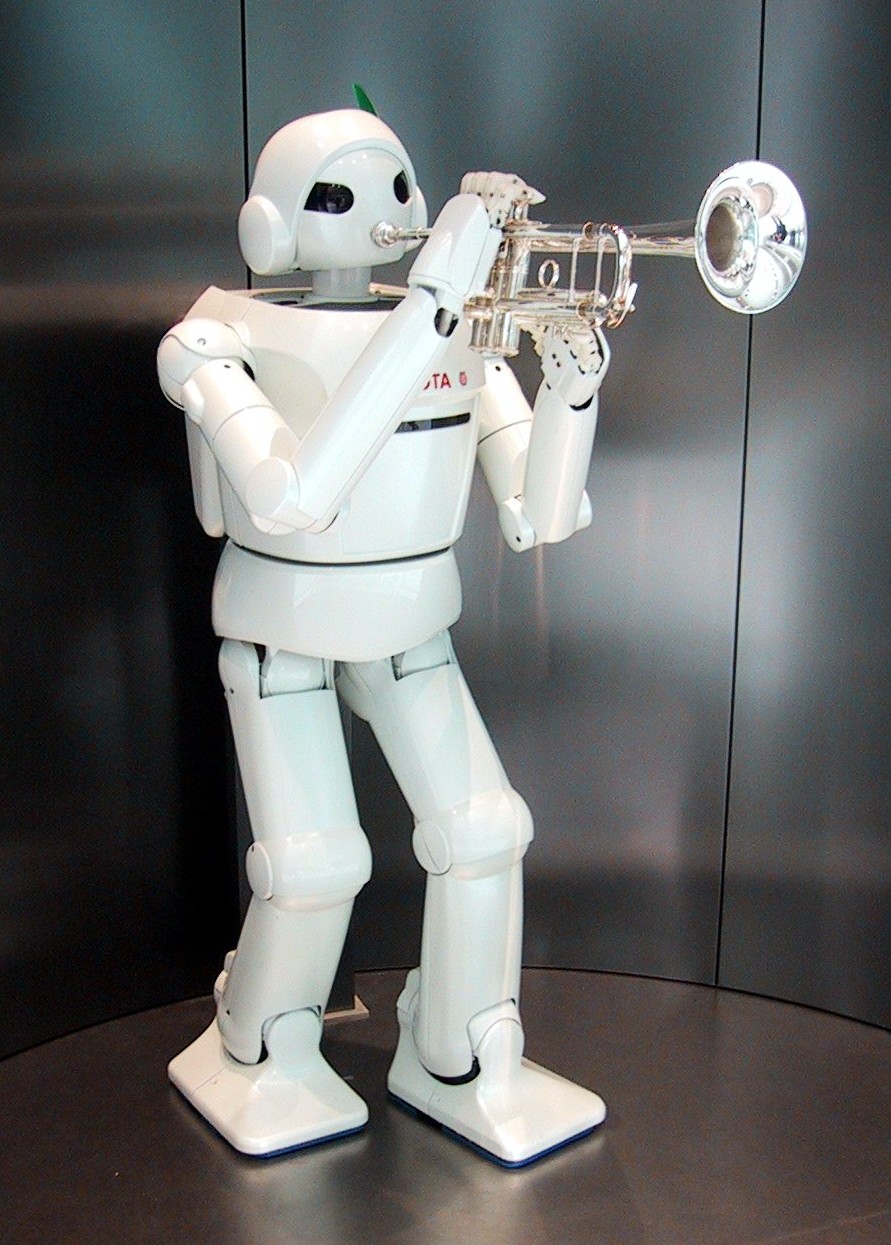
Humanoide Roboter sollen in wenigen Jahren Marktreife erlangen. Zu den aktuellen Fähigkeiten gehören: gehen, Treppen steigen, rennen, Tablettwagen schieben, Tablett entgegennehmen, transportieren, übergeben, servieren [1][2], tanzen [3], bewegte Hindernisse umlaufen[4], Trompete spielen[5], Geige spielen, in Band Musik spielen[6], Rad fahren[7], Lasten tragen[8][9], Getränke einschenken[10], schwimmen[11], Spülmaschine ein- und ausräumen [12] u. a.
Kommerzielle Projekte Humanoider Roboter
 Humanoider Roboter von Toyota
Humanoider Roboter von Toyota- Asimo (Honda) – in Vermietung
- HOAP-1 und -2 (Fujitsu)[13] – eine humanoide Roboter-Serie, welche auch kommerziell zu Forschungszwecken vertrieben wird
- Toyota-Roboter (Toyota) – Unterhaltungsroboter[14]
- Qrio (Sony) – Weiterentwicklung seit März 2006 eingestellt
- Wakamaru (Mitsubishi) – im Verkauf
- Ri-man, Japan
Projekte Humanoider Roboter in der K.I.-Forschung
- RobotCub, italienisch/britisches universitäres Konsortium
- COG, Kismet, Massachusetts Institute of Technology
- ERATO Synergistic Robotics, Universität Osaka
In Deutschland forschen mindestens folgende Universitäten mit humanoiden Robotern:
- Rheinische Friedrich-Wilhelms-Universität Bonn (NimbRo)
- Freie Universität Berlin (FU-manoid)
- Humboldt-Universität zu Berlin (Humanoid Team Humboldt)
- Technische Universität Berlin (ZARx)
- Technische Universität Darmstadt (Darmstadt Dribblers)
- Universität Bremen (B-Human)
- Technische Universität Dortmund (DoH!Bots)
- Universität der Bundeswehr München (HERMES)
- Universität Karlsruhe (ARMAR III)
- Technische Universität München (Johnnie,Lola)
Weblinks
- http://www.robotcub.org
- http://www.androidworld.com/prod01.htm
- SFB 588 Sonderforschungsbereich Humanoide Roboter - Lernende und kooperierende multimodale Roboter (Karlsruhe)
- http://www.robotstore.de/roboter_in_filmen.htm Humanoide Roboter im Kino
Einzelnachweise
- ↑ video asimo rennend
- ↑ video asimo deomonstriert verschiedene Fähigkeiten
- ↑ video: Roboter tanzend
- ↑ Video: Roboter umläuft bewegte Hindernisse
- ↑ Video: Roboter spielt Trompete
- ↑ video: Roboter Musik Quartett
- ↑ video: Roboter fährt Rad
- ↑ video: BigDog ist eher ein Lastenesel, trägt bis 180 kg
- ↑ spiegel video BigDog der Transportroboter
- ↑ video: Roboter Justin schenkt Eistee ein
- ↑ video: schwimmender Roboter
- ↑ siehe Armar 3
- ↑ Humanoid Robot HOAP-1 und HOAP-2 (englisch) – eine humanoide Roboter-Serie von Fujitsu
- ↑ spiegel.de: Toyotas Fiedel-Robbi

Wikimedia Foundation.