- LSI-System
-
Als ein lineares zeitinvariantes System (LZI System, international LTI linear, time-invariant) wird ein System dann klassifiziert, wenn es zwei Bedingungen erfüllt: Es ist linear und es ist zeitinvariant.
Inhaltsverzeichnis
Systemeigenschaften
Damit ein System ein LZI-System ist, müssen die folgenden beiden Eigenschaften gelten: Linearität und Zeitinvarianz.
Linearität bedeutet, dass zwischen Ein- und Ausgangsgröße stets Proportionalität herrscht. Es müssen sowohl das Verstärkungsprinzip als auch das Superpositionsprinzip zutreffen.
Verstärkungsprinzip: Zwei zueinander proportionale Eingangssignale verursachen eine in derselben Weise proportionale Systemantwort.
 Verstärkungsprinzip
VerstärkungsprinzipÜberlagerungsprinzip, auch Superposition genannt:
Zunächst wird am Eingang des Systems ein Signal angelegt und die Reaktion beobachtet. Danach wird die Reaktion auf ein zweites Signal untersucht. Beim Anlegen eines Eingangssignals, das die Summe aus den beiden zuvor begutachteten Signale bildet, lässt sich feststellen, dass die Reaktion am Ausgang der Addition der beiden einzelnen Antworten entspricht, wenn das System linear ist.
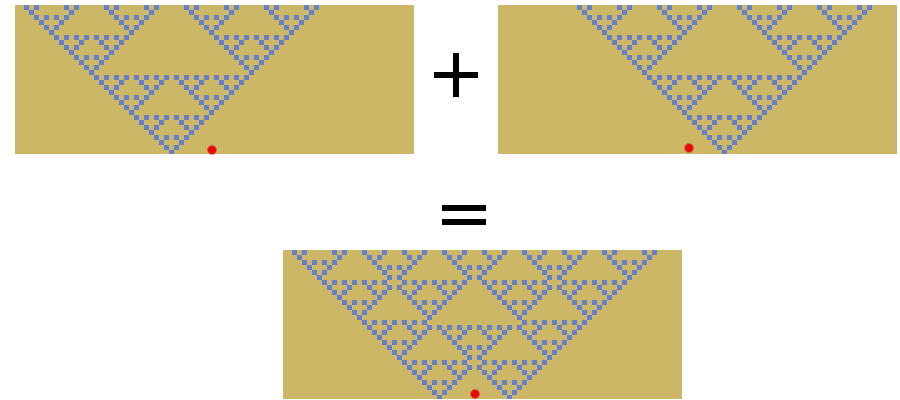 Überlagerungsprinzip
ÜberlagerungsprinzipDie mathematische Beschreibung eines LZI Systems kann u. a. im Zeitbereich in Zustandsraumdarstellung, also mit einem linearen Differentialgleichungssystem erfolgen.
Für Zeitinvarianz muss die Systemantwort den Zeitbezug zum Eingang beibehalten und identisch reagieren (Verschiebungsprinzip):
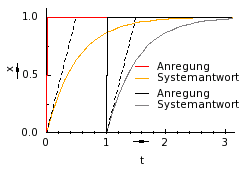 Verschiebungsprinzip
VerschiebungsprinzipDemzufolge sind für ein LZI-System die Koeffizientenmatrizen konstant über der Zeit, worauf sich die Bezeichnung zeitinvariant bezieht.
Ein LZI-System kann dynamisches Verhalten aufweisen. Dynamisches Verhalten zeichnet sich dadurch aus, dass der Ausgang nicht nur aktuell zur Veränderung der Eingangsgröße (stationär) reagiert, sondern verzögert über den folgenden Zeitraum hinweg. Hierbei spricht man auch von Einschwingvorgang, Ausgleich oder Verzögerung.
Zunächst wurden nur Eingrößensysteme betrachtet. Mehrgrößensysteme sind komplexer, im einfachsten Fall lassen sie sich so umformen, dass sie in mehrere Eingrößensysteme zerfallen, die sich überlagern. Diese müssen selbstverständlich auch LZI-Eigenschaften aufweisen.

Genauere Betrachtungen erlaubt noch die Zustandsraumdarstellung.
Für einfache Systeme errechnet sich aus dem Faltprodukt von Eingangsfunktion und Impulsantwort die Reaktion am Ausgang.
Lässt sich die Impulsantwort nicht direkt bestimmen, kann sie durch Ableiten der Sprungantwort, oder die zweite Ableitung der Rampenantwort ersetzt werden.
LZI-Systeme in verschiedenen Formen der Darstellung
Auf die verwendeten Darstellungsformen selbst wird in den verlinkten Artikeln detailliert eingegangen.
Zeitbereich
Die gebräuchlichste Systemdarstellung im Zeitbereich, die Zustandsraumdarstellung, hat die allgemeine Form
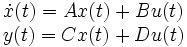
Hierin sind die Vektoren u Eingangsvektor, x Zustandsvektor und y Ausgangsvektor. Sind die Matrizen A Systemmatrix, B Eingangsmatrix, C Ausgangsmatrix und D Durchgriffsmatrix konstant, so ist das System linear und zeitinvariant. Zur Addition und Multiplikation von Vektoren und Matrizen siehe Matrix (Mathematik).
Bildbereich
Für einfachere Systeme, insbesondere SISO-Systeme (Single Input, Single Output Systeme) mit nur je einer Ein- und Ausgangsgröße, wird auch oft noch die Beschreibung durch eine Übertragungsfunktion ("Bildbereich" oder "Frequenzbereich", intern. "frequency domain") gewählt

Hierin ist Z das Zählerpolynom in s, und N das Nennerpolynom in s. Sind alle Koeffizienten beider Polynome konstant, ist das System linear und zeitinvariant.
Die Übertragungsfunktion bietet sich zur graphischen Darstellung als Ortskurve oder Bodediagramm an.
Beispiele
- Elektrotechnik: Filter-Schaltungen oder Verstärker
- Mechanik: Getriebe
- Thermodynamik: Zentralheizung, Motorkühlung
- Wandler zwischen den zuvor genannten Systemarten: Elektromotor (Strom-Kraft), Temperatursensor (Temperatur-Strom)
- Mathematisch (Digitale Simulation): Regler aller Art z. B. PID-Regler
Beispiel aus der Mechanik
Der freie Fall ohne Reibung wird beschrieben durch die Differentialgleichung

mit dem Weg z, der Beschleunigung an der Erdoberfläche g und der Masse des fallenden Gegenstandes m. Übertragen in die Zustandsraumdarstellung und unter herauskürzen von m erhält man die Zustandsdifferentialgleichung
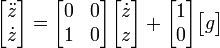
wobei g als (in der Regel konstanter) äußerer Einfluss betrachtet wird, und damit ein (das einzige) Glied des Eingangsvektors bildet. Interessiert man sich naheliegender Weise für die momentane Position p und Geschwindigkeit v, lautet die Ausgangsgleichung
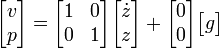
mit einer 1-Matrix als Ausgangsmatrix und einer Nullmatrix als Durchgriffsmatrix, da die Ausgänge identisch mit den Zuständen sind. In dieser Betrachtung handelt es sich um ein LZI System, da alle Matrizen des linearen Differentialgleichungssystems konstant sind.
Berücksichtigt man aber, dass die Erdbeschleunigung g abhängig ist vom Abstand der Massenschwerpunkte

mit der Erdmasse mE und dem Erdradius rE, so ist das System nichtlinear abhängig vom Zustand z, also kein LZI System.
Wird die Erdbeschleunigung g aufgrund einer meist sehr viel kleineren Höhe z gegenüber dem Erdradius z < < rE weiterhin als konstant betrachtet

aber die Gleitreibung zwischen betrachteter Masse und Luft als sehr viel einflussreicher in linearer Abhängigkeit von
 linear berücksichtigt (siehe auch Freier Fall mit Stokes-Reibung), erhält man die Zustandsdifferentialgleichung
linear berücksichtigt (siehe auch Freier Fall mit Stokes-Reibung), erhält man die Zustandsdifferentialgleichung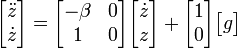
mit dem Reibkoeffizienten β. Wird β als Formkonstante des fallenden Gegenstandes betrachtet, handelt es sich nach wie vor um ein LZI System.
Literatur
- Heinz Unbehauen: Regelungstechnik 1, Vieweg, Braunschweig/Wiesbaden, ISBN 3-528-93332-1
- Alan V. Oppenheim, Roland W. Schafer, John R. Buck: Zeitdiskrete Signalverarbeitung, Pearson/München, ISBN 3-8273-7077-9
![x_{a}(t)=T\left[x_{e}(t)\right] \Rightarrow a\cdot x_{a}(t) = T\left[a\cdot x_{e}(t)\right]](/pictures/dewiki/99/cbcd08d2c2136498ad2f31a452339a8f.png)
![\lbrace x_{a.a}(t)=T\left[x_{e.a}(t)\right]\wedge x_{a.b}(t)=T\left[x_{e.b}(t)\right] \rbrace \Rightarrow \lbrace x_{a.a}(t)+x_{a.b}(t)=T\left[x_{e.a}(t)+x_{e.b}(t)\right] \rbrace](/pictures/dewiki/51/36d0b736932661a38746b0ff460afc3f.png)
![x_{a}(t)=T\left[x_{e}(t)\right] \Rightarrow x_{a}(t+t_{0})=T\left[x_{e}(t+t_{0})\right]](/pictures/dewiki/56/841580e7a37961db30af390c8be2b4cc.png)

Wikimedia Foundation.