- Mehrkörpersystem
-
Ein Mehrkörpersystem ist ein mechanisches System von Einzelkörpern, die untereinander durch Gelenke gekoppelt sind und unter dem Einfluss von Kräften stehen.
Inhaltsverzeichnis
Einleitung
Mit Hilfe der Kinematik, einem Teilgebiet der Mechanik, wird die Bewegung der Körper mathematisch formuliert. Während ein Mehrkörpersystem auch unbeweglich sein kann, beschreibt man mit dem Begriff Mehrkörpersystem üblicherweise ein System welches sich über die Zeit hin bewegt. Die Untersuchung der Bewegung (Dynamik) eines Mehrkörpersystems wird Mehrkörperdynamik genannt.
In diesem Artikel wird ein Überblick über einige wichtige Aspekte von Mehrkörpersystemen gegeben, wobei sich Ende der 1990er Jahre viele neuere Teilgebiete entwickelt haben (Optimierung, Sensitivitätsanalyse, Robotik, Regelung, Automobile und Schienenfahrzeuge, u. a.), die nicht in diesem Artikel Platz gefunden haben.
Anwendungsgebiete
Mehrkörpersysteme werden vermehrt zur Modellierung der Bewegung von (Teil-)Körpern in technischen Anwendungen eingesetzt:
- Robotik
- Fahrzeugsimulation (Fahrdynamik, Reifen, Komfortverbesserung, Gewichtsreduktion, u. a.)
- Simulation von Motoren, Getriebe, Kettentriebe, Riementriebe, u. a.
- Simulation von Fördermaschinen, speziell Papiermaschinen
- Partikelsimulation (z. B. Sand)
- Biomechanik (Bewegungsoptimierung, Prothesen, Gehhilfen, u. a.)
- Luftfahrtindustrie (z. B. Start/Landemanöver von Flugzeugen, Rotor eines Hubschraubers)
- Weltraumforschung (z. B. Satelliten)
- Militärische Anwendungen
Beispiel
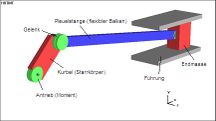
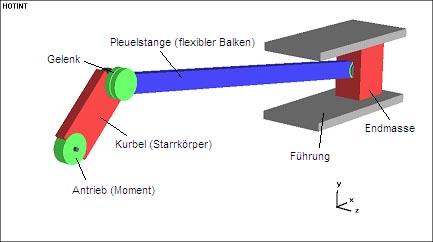
Die nachfolgende Abbildung zeigt ein typisches Beispiel eines Mehrkörpersystems. Dieses System wird auch Kurbeltrieb (englisch slider-crank) genannt. In diesem Beispiel wird ein Starrkörper für die angetriebene Kurbel verwendet welcher ein flexibles Pleuel antreibt und schließlich die Endmasse (konzentrierte Masse) bewegt. Die Endmasse kann sich nur innerhalb der Führung bewegen. Es sind 3 Drehgelenke eingebaut, eines zwischen Kurbel und Inertialsystem, eines zwischen Kurbel und Pleuel und eines zwischen Pleuel und Endmasse.
Um den bewegten Mechanismus zu sehen, wurde auch eine GIF-Animation beigefügt. Um diese betrachten zu können, muss evtl. im Browser die Funktion GIF-Animation aktiviert werden.
Begriffe
Unter einem Körper versteht man einen festen (evtl. flexiblen) Körper im mechanischen Sinne (also nicht mit dem mathematischen Körper oder menschlichen Körper zu verwechseln). Ein Körper ist zum Beispiel ein Arm eines Roboters, das Lenkrad eines Autos, aber auch der Unterarm eines Menschen. Gelenke kann man sich ebenso z. B. anhand eines Gelenks im menschlichen Körper oder am Beispiel eines Gelenkes in einer Maschine bzw. im Autos vorstellen.
In der Mehrkörperdynamik sind zwei weitere Begriffe von zentraler Bedeutung: Freiheitsgrad und Zwangsbedingung.
Freiheitsgrad
Im Sinne eines mechanischen Körpers stellt die Anzahl der Freiheitsgrade die Zahl der voneinander unabhängigen Bewegungsmöglichkeiten dar. Ein starrer Körper besitzt 6 Freiheitsgrade bei allgemeiner räumlicher Bewegung, davon 3 Translationsfreiheitsgrade und 3 Rotationsfreiheitsgrade. Betrachtet man nur die Bewegung eines Körpers (und aller seiner Punkte) in einer Ebene, so hat dieser Körper nur noch 3 Freiheitsgrade: 2 Translationsfreiheitsgrade und einen Rotationsfreiheitsgrad.
- Beispiel
Beim Betrachten eines Körpers im Raum, z. B. der Computermaus, kann man 3 Translationsfreiheitsgrade einfach durch die Bewegungen links-rechts, vor-zurück, auf-ab feststellen. 3 Rotationsfreiheitsgrade findet man bei der Computermaus z. B. folgendermaßen: Man stelle sich vor, die Bewegung der Maus beschreibt bei den 3 Translationsfreiheitsgraden jeweils eine Gerade (also eine Gerade von links nach rechts, usw.). Diese Geraden nimmt man nun als gedachte Drehachse, um welche man den Körper dreht
Zwangsbedingung
Zwangsbedingungen stellen eine Einschränkung der Bewegungsmöglichkeiten von Körpern dar. Zwänge können sowohl zwischen 2 Körpern als auch zwischen einem Körper und einem Fixpunkt im Raum aufgebracht werden. Entgegen der Annahme im Link "Zwangsbedingungen", dass nämlich nur Massenpunkte unter Zwang stehen können, wird eine Zwangsbedingung im Mehrkörpersystem verallgemeinert: Es können Verdrehungen einem Zwang unterliegen, ebenso Geschwindigkeiten (auch Winkelgeschwindigkeiten) oder Beschleunigungen.
Bewegungsgleichungen
Die Bewegung des Mehrkörpersystems wird mit den Bewegungsgleichungen beschrieben, welche aus dem 2. Newtonschen Axiom und den zusätzlichen Zwangsbedingungen resultieren.
Die Bewegung eines Starrkörpersystemes lässt sich folgendermaßen ausdrücken:
Diese Formulierung wird auch mit dem Begriff redundante Koordinaten bezeichnet. Hierbei stellen generalisierten Koordinaten
 die Freiheitsgrade der nicht unter Zwang stehenden Körper dar,
die Freiheitsgrade der nicht unter Zwang stehenden Körper dar,  ist die Massenmatrix, welche von den generalisierten Koordinaten abhängen kann,
ist die Massenmatrix, welche von den generalisierten Koordinaten abhängen kann,  beschreibt die Zwangsbedingungen und
beschreibt die Zwangsbedingungen und  ist die Ableitung der Zwangsbedingungen nach den generalisierten Koordinaten. Das Symbol
ist die Ableitung der Zwangsbedingungen nach den generalisierten Koordinaten. Das Symbol  bezeichnet in dieser Formulierung der Bewegungsgleichungen die Lagrange'schen Multiplikatoren. Geht man von einem einzigen Körper aus, so kann man die generalisierten Koordinaten aufteilen in
bezeichnet in dieser Formulierung der Bewegungsgleichungen die Lagrange'schen Multiplikatoren. Geht man von einem einzigen Körper aus, so kann man die generalisierten Koordinaten aufteilen inwobei
 die Translationen beschreibt, und
die Translationen beschreibt, und  die Rotationen beschreibt.
die Rotationen beschreibt.Quadratischer Geschwindigkeitsvektor
Der Ausdruck
 stellt den quadratischen Geschwindigkeitsvektor dar, welcher sich zufolge der Ableitung der Gleichungen von der kinetischen Energie ergibt. Dieser Term hängt von den gewählten Rotationsparametern ab.
stellt den quadratischen Geschwindigkeitsvektor dar, welcher sich zufolge der Ableitung der Gleichungen von der kinetischen Energie ergibt. Dieser Term hängt von den gewählten Rotationsparametern ab.Lagrange'sche Multiplikatoren
Die Lagrange'schen Multiplikatoren λi sind je einer Zwangsbedingung Ci = 0 zugeordnet und stellen zumeist Kräfte oder Momente dar, welche in Richtung des gesperrten Freiheitsgrades wirken, allerdings keine Arbeit leisten.
Zwangsbedingungen und Gelenke
Gelenke werden in der allgemeinsten Beschreibungssprache für Mehrkörpersysteme mittels Zwangsbedingungen ausgedrückt. Wie bereits erwähnt, können Zwangsbedingungen sowohl für Verschiebungen und Verdrehungen als auch für die zeitlichen Ableitungen dieser Größen verwendet werden.
Man unterscheidet vorerst holonome und nicht-holonome Zwangsbedingungen, eine genauere Beschreibung wird im Abschnitt Zwangsbedingung gegeben. Für Mehrkörpersysteme ist es wichtig, dass übliche Gelenke wie zylindrisches Gelenk, Kugelgelenk, prismatisches Gelenk, etc. unter holonome Zwangsbedingungen fallen.
Minimalkoordinaten
Die Bewegungsgleichungen werden mit redundanten Koordinaten beschrieben, welche aufgrund der Zwänge nicht voneinander unabhängig sind. Es ist unter bestimmten Voraussetzungen möglich, dass man diese Formulierung in ein System mit nicht-redundanten, also voneinander unabhängigen Koordinaten und ohne Zwangsbedingungen, überschreibt. Diese Transformation ist grundsätzlich nicht möglich wenn die verbundenen Körper einen geschlossenen Ring (Schleife) aufweisen oder wenn es sich nicht um einfache holonome Gelenke handelt. Dennoch kann man auf ein System mit der kleinstmöglichen Anzahl von Koordinaten übergehen, indem man Zwänge nur an bestimmten unvermeidbaren Stellen einfügt und an den übrigen Stellen nicht-redundante Koordinaten verwendet. Eine mögliche Art der Formulierung mit Minimalen Koordinaten ist die sogenannte rekursive Formulierung.
Englische Fachbegriffe
Üblicherweise wird Mehrkörpersystem mit multibody system oder multi-body system ins Englische übersetzt, und Mehrkörperdynamik als dynamics of multibody systems oder multibody system dynamics. Zwangsbedingung wird constraint condition genannt, Gelenke werden mit joints bezeichnet. Wie aus der Begrifflichkeit bereits hervorgeht, besteht ein Mehrkörpersystem aus einzelnen Körpern, die als „Bodies“ bezeichnet werden. Jeder dieser Körper besitzt mindestens einen „Marker“, das heißt einen Angriffspunkt für Kräfte oder Gelenke. Mittels dieser Gelenke („Joints“) können die einzelnen Körper miteinander verbunden werden, wobei jeder Körper genau einen „Joint“ besitzt, da seine Position und Art der Anbindung im Gesamtsystem definiert sein müssen
Siehe auch
Literatur
- J. Wittenburg: Dynamics of Systems of Rigid Bodies. Teubner, Stuttgart 1977.
- K. Magnus: Dynamics of multibody systems. Springer Verlag, Berlin 1978.
- P. E. Nikravesh: Computer-Aided Analysis of Mechanical Systems., Prentice-Hall, 1988.
- E. J. Haug: Computer-Aided Kinematics and Dynamics of Mechanical Systems. Allyn and Bacon, Boston 1989.
- H. Bremer, F. Pfeiffer: Elastische Mehrkörpersysteme. B. G. Teubner, Stuttgart 1992.
- A. A. Shabana: Dynamics of multibody systems. Second Edition, John Wiley & Sons, 1998.
- M. Géradin, A. Cardona: Flexible multibody dynamics – A finite element approach. Wiley, New York 2001.
- J. Gerstmayr: The absolute coordinate formulation with elasto-plastic deformations. In: Journal of Multibody System Dynamics. Vol. 12, 2004, S. 363–383, doi:10.1007/s11044-004-2522-3.
Weblinks
- http://real.uwaterloo.ca/~mbody/ (Linksammlung von John McPhee).
- http://tmech.mechatronik.uni-linz.ac.at/staff (Flexible Mehrkörpersysteme von Johannes Gerstmayr mit vielen Animationen).



![\mathbf{q} = \left[ \mathbf{u} \quad \mathbf{\Psi} \right]^T](1/071d1b3baf40ee37f19b60e97933a953.png)
Wikimedia Foundation.