- Gimbal Lock
-
 Gimbal lock
Gimbal lock
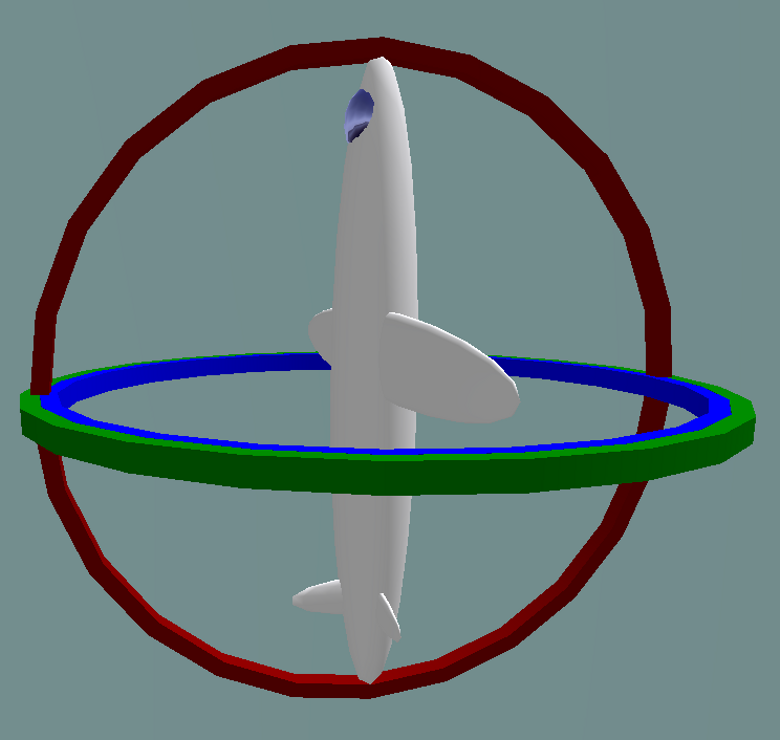
Gimbal Lock (engl.) bzw. kardanische Blockade bezeichnet ein geometrisches Problem, welches bei Transformationen in Verbindung mit Eulerwinkeln auftreten kann. Der Begriff stammt aus dem Englischen, Gimbal heißt hier Kardanische Aufhängung, Gimbal Lock ist also deren Blockade. Eulerwinkel wie kardanische Aufhängung entsprechen drei nacheinander ausgeführten Drehungen, wobei die Drehachse jeweils von den vorherigen Drehungen mitbestimmt wird. Das Problem entsteht dadurch, dass die Achse der ersten Drehung und die der dritten zusammenfallen können. Dann ist nur noch die Summe aus erstem und drittem Winkel ausschlaggebend, verschiedene Kombinationen ergeben also dieselbe Drehung. Damit fehlt ein Freiheitsgrad, die kardanische Aufhängung kann einer Bewegung in die entsprechende Richtung nicht folgen. Es handelt sich um einen kritischen Wert im mathematischen Sinne.
In der Praxis ist dies bei der Navigation von Schiffen (besonders U-Booten und ROVs), der Luftfahrt und speziell der Raumfahrt von Bedeutung, sowie in allen Anwendungen von kardanisch aufgehängten Kreiseln. Hauptsächlich also bei Kreiselkompassen und Stabilisierungskreiseln (in Raumfahrzeugen).
Ähnlich tritt der Gimbal Lock auch bei Computermodellen auf, beispielsweise bei dreidimensionalen Simulationen, also auch bei einigen Computerspielen. Eine Lösung des Problems stellt hier die Verwendung von Quaternionen dar.
Im Gegensatz zu mathematischen Modellen kann bei mechanischen Kreiselsystemen schon eine Annäherung an die Überlagerung zu Problemen führen. Neben einer rechnerischen Lösung lässt sich der Effekt durch einfache Stellmotoren in den drei Achsen lösen, die bei der Gefahr einer Überlagerung gegensteuern können. Das Gegensteuern ist wichtig, da zwei deckungsgleiche mechanische Achsen bei fortgesetzter Rotation falsch folgen können. Dabei ist es möglich, dass beide Achsen in der gleichen Orientierung folgen oder die Achsen in der Orientierung der jeweils anderen Achse weiterlaufen. Beide Fälle liefern eine falsche dargestellte Fluglage und einen falschen dargestellten Kurs, was zur Folge hat, dass die nachgeschalteten Steuerungen falsch reagieren und damit zu einer Verschlechterung der Lage führen. Dies schaukelt sich in der Raumfahrt zum unkontrollierten Taumeln auf. Beim Gemini-Programm wurde beispielsweise mit einem Kreiselkompass gearbeitet, der eine vierte Achse zum Gegensteuern hatte. Beim Kompass für Apollo-Raumschiffe wurde darauf verzichtet, im Space Shuttle ist die vierte Achse wieder eingebaut worden.
Der Apollo Guidance Computer, der gegenüber dem Gemini Guidance Computer wesentlich verbessert wurde, hatte im Anzeige- und Bedienteil eine Warnlampe für einen drohenden Gimbal Lock ab einer um 70° veränderten Achslage.
Weblinks
- NASA-Seite
- Gimbal Lock
- Erläuterung zum Gimbal Lock bei Youtube (Video, engl.)
Wikimedia Foundation.