- Globales Navigationssatellitensystem
-
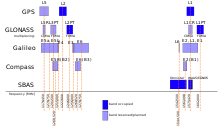 Frequenzen der verschiedenen GNSS
Frequenzen der verschiedenen GNSS
Ein Globales Navigationssatellitensystem (englisch Global Navigation Satellite System) oder GNSS ist ein System zur Positionsbestimmung und Navigation auf der Erde und in der Luft durch den Empfang der Signale von Navigationssatelliten und Pseudoliten.
Inhaltsverzeichnis
Arbeitsweise
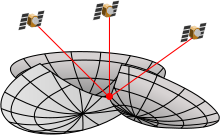 Schnittpunkt von 3 Kugelflächen
Schnittpunkt von 3 KugelflächenDie Satelliten der GNSS-Satellitenkonstellation teilen über Funk ihre genaue Position und Uhrzeit mit. Zur Positionsbestimmung muss ein Empfänger die Signale von mindestens vier Satelliten gleichzeitig empfangen. Im Empfangsgerät werden die Pseudo-Signallaufzeiten gemessen (von den Satelliten zur Empfangsantenne inklusive Uhrenfehler des Empfängers) und daraus die aktuelle Position (inklusive der Höhe) und der Uhrenfehler ermittelt.
Bei einer Flughöhe von ca. 25.000 km wird eine Konstellation von 24 bis 30 Satelliten verwendet. Damit soll sichergestellt werden, dass die Empfangsgeräte – auch bei nicht vollkommen freier Sicht zum Horizont – möglichst immer Signale von mindestens vier Satelliten gleichzeitig empfangen können.
Durch stationäre Empfangsstationen kann die Positionsgenauigkeit verbessert werden. Sie übermitteln Korrektursignale (DGPS) an die Nutzer. Von den Landesvermessungsämtern wird das deutsche SAPOS-System betrieben. SAPOS stellt drei verschiedene Signaldienste zur Verfügung, die eine Genauigkeit von bis zu unter 1 cm erreichen.
Satellitengestützte Zusatzsysteme, engl. Satellite-Based Augmentation Systems (SBAS), sind das europäische EGNOS, das US-amerikanische WAAS, das japanische MSAS und das indische GAGAN, die die Korrektursignale über geostationäre Satelliten abstrahlen. Das chinesische System Compass befindet sich noch im Aufbau, das indische System IRNSS noch in Planung.
Einzelheiten der beim GPS verwendeten Technik finden sich auch in den Artikeln GPS-Technik und Hyperbelnavigation; die anderen oben genannten Systeme unterscheiden sich in unterschiedlichem Ausmaß davon.
Messpraxis
Der Satellitenstandort ändert sich ständig und mit ihm die Entfernung des Satelliten zu einem bestimmten Punkt der Erde. Jedoch kann der Nutzer aus den in den Satellitensignalen enthaltenen Bahndaten (Ephemeriden) die Satellitenstandorte für jeden Zeitpunkt berechnen. Diese Bahndaten (bei GPS und Galileo handelt es sich um Kepler-Elemente, bei GLONASS um Koordinaten-Geschwindigkeits- und Beschleunigungsvektoren) werden von den Bodenstationen regelmäßig abgeglichen (bei GPS ca. alle 2 Stunden).
Die Entfernung vom Satelliten zum Beobachter erschließt sich aus der Signallaufzeit. Jeder Satellit strahlt fortwährend seinen individuellen Code und seine individuellen Bahndaten aus. Der Code wiederholt sich bei GPS und GLONASS jede Millisekunde. Der Empfänger erzeugt dieselben Satellitencodes und gleicht diese über eine entsprechende Zeit- und Frequenzverschiebung an die empfangenen Satellitensignale an (PLL, Laufzeit- und Dopplereffekte).
Die so gemessene Zeitverschiebung entspräche bei genau synchronisierten Uhren im Satelliten und Empfänger der Laufzeit der Satellitensignale. Die Multiplikation dieser Laufzeit mit der Signalgeschwindigkeit (annähernd Lichtgeschwindigkeit) ergibt die Strecke vom Satelliten zum Empfänger.
Für eine Streckengenauigkeit von 3 Metern müssen die Laufzeiten mit einer Genauigkeit von 10 Nanosekunden bestimmt werden. Anstatt den Empfänger aber mit einer entsprechend hochgenauen Atomuhr auszustatten, wird der Fehler der Empfängeruhr ermittelt und bei der Positionsberechnung berücksichtigt. Zur Bestimmung der vier Unbekannten (drei Raumkoordinaten und Empfängeruhrenfehler) benötigt man vier Satelliten. Dies führt zu vier Gleichungen mit vier Unbekannten.
Die ermittelten Koordinaten beziehen sich auf das Koordinatensystem des jeweiligen Navigationssystems; bei GPS beispielsweise auf WGS84. Auch die ermittelte Zeit ist durch das Navigationssystem definiert; so weicht z.B. die GPS-Zeit um einige Sekunden von der Universalzeit UTC ab, da Schaltsekunden bei der GPS-Systemzeit nicht berücksichtigt werden. Seit Anfang 2009 beträgt diese Abweichung 15 Sekunden.
Aus den Raumkoordinaten können die geographische Länge, geographische Breite und die Höhe über dem definierten Referenzellipsoid berechnet werden. Zu beachten ist jedoch, dass die verwendeten Koordinatensysteme von anderen gängigen Koordinatensystemen abweichen können, so dass die ermittelte Position von der Position in vielen, insbesondere älteren Landkarten bis zu einigen hundert Metern abweichen kann. Auch die per GNSS ermittelte Höhe und die Höhe „über dem Meeresspiegel“ können vom tatsächlichen Wert (Geoid) um etliche Meter abweichen.
Messfehler
Wie bei der Triangulation sollte das Volumen des Tetraeders, das die Satelliten mit dem Beobachter an der Spitze aufspannen, möglichst groß sein; ansonsten verringert sich die erreichbare Positionsgenauigkeit (Dilution of Precision (DOP)). Befinden sich die Satelliten mit dem Empfänger in einer Ebene, das heißt vom Beobachter gesehen scheinbar auf einer Linie, ist keine Ortsbestimmung möglich. Eine solche Konstellation tritt jedoch praktisch nie auf.
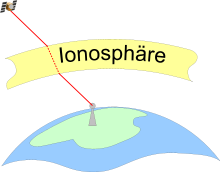 Laufzeitfehler durch Refraktion
Laufzeitfehler durch Refraktion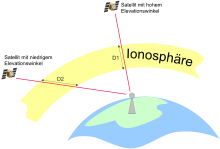 Laufzeitfehler durch Winkel
Laufzeitfehler durch WinkelDie Atmosphäre verändert die Signallaufzeit. Anders als bei der Troposphäre ist der Einfluss der Ionosphäre frequenzabhängig. Er lässt sich teilweise korrigieren, wenn der Empfänger Signale auswertet, die der Satellit auf unterschiedlichen Frequenzen sendet. Für die zurzeit (2011) im Freizeitmarkt üblichen GPS-Empfänger steht nur ein Signal zur Verfügung.
Die Schwankungsbreite der Anzahl der freien Elektronen in der Ionosphäre verursacht einen Ortsfehler von bis zu 30 m. Um ihn auf unter 10 m zu reduzieren, übermitteln GPS-Satelliten 6 Parameter, die den aktuellen Ionosphärenzustand beschreiben. Kurzfristige Szintillationen lassen sich damit nicht korrigieren.
Positionsgenauigkeit bei unkorrigierten Messwerten (User Range Error (URE)):
Quelle Zeitfehler Ortsfehler Satellitenposition 6–60 ns 1–10 m Zeitdrift 0–9 ns 0–1,5 m Ionosphäre 0–180 ns 0–90 m Troposphäre 0–60 ns 0–10 m Mehrwege-Effekt 0–6 ns 0–1 m Die satellitenbedingten Fehler, also Satellitenposition und Zeitmessung, werden im Englischen als Signal-In-Space USR (SISURE) bezeichnet, die Fehler bei der Wegausbreitung User Equipment Range Error (UERE).
Die Genauigkeit nimmt zu, wenn mehr als 4 Satelliten empfangen werden können. Diese Messung wird dann "überbestimmte Ortung" genannt. Die Fehler lassen sich nachträglich durch Vergleich mit Referenzmessungen bis auf wenige Zentimeter verringern. Mit Differential-GPS (DGPS) ist auch ein Abgleich in Echtzeit möglich.
Wertet man außerdem noch die Phasen der Satellitensignale aus, lassen sich auch dynamisch relative Genauigkeiten von wenigen Zentimetern erreichen.
Systeme
Die militärischen Systeme NAVSTAR-GPS (kurz GPS) der USA und das russische GLONASS nennt man Systeme der ersten Generation. Nach der Aufrüstung mit neuen Satelliten steht das GPS der zweiten Generation voraussichtlich ab 2012 zur Verfügung. Es wird mit Galileo vergleichbar sein, das ebenfalls zur zweiten Generation zählen wird. Im ESA-Sprachgebrauch steht GNSS-1 für die ursprünglichen Systeme GPS und GLONASS, GNSS-2 für Galileo und Systeme der zweiten Generation.
Mit dem Begriff GPS III wird die komplette Überarbeitung aller Systembestandteile bezeichnet. Diese Neukonzeptionierung wird bis zum endgültigen Aufbau der zweiten Generation dauern und Qualitätsverbesserungen in vielen Bereichen zur Folge haben.
System Betreiber Erste Generation Zweite Generation NAVSTAR-GPS USA seit 1995 ab 2012 GLONASS Russland seit 1993 ab 2012 Galileo Europa Start unbestimmt Ende 2011 soll das Quasi-Zenit-Satelliten-System JAPANs in Betrieb gehen und die Ortung in Japans Häuserschluchten verbessern. In CHINA sind von Compass bereits 9 Satelliten im Umlauf. In INDIEN unterstützt zumindest ein Satellit (GSAT-8) von ISRO seit Mitte 2011 GAGAN (GPS Aided Geo Augmented Navigation).[1]
Weitere Anwendungen
GNSS-Satelliten senden nicht nur ein Radiosignal, sondern auch die exakte Position des Senders. Aus der Lokalisierung der Signalquelle und einem Vergleich mit der bekannten Position ergeben sich Hinweise auf die Beschaffenheit des Ausbreitungsmediums.
Mittels Radio-Okkultation lassen sich mit GPS-Signalen Beobachtungen der Atmosphäre durchführen und mit GNSS-R Beobachtungen zur Beschaffenheit von Wasseroberflächen.
Siehe auch
Literatur
- Werner Mansfeld: Satellitenortung und Navigation. Grundlagen, Wirkungsweisen und Anwendung globaler Satellitennavigationssysteme. 3. Auflage. Vieweg, Wiesbaden 2010, ISBN 978-3-8348-0611-6.
- Hans Dodel, Dieter Häupler: Satellitennavigation. 2. Auflage. Springer, Berlin 2010, ISBN 978-3-540-79443-1.
Einzelnachweise
Weblinks
 Wiktionary: Satellitennavigation – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Satellitennavigation – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen- Fachstelle der Wasser und Schifffahrtsverwaltung für Verkehrstechniken, Funknavigation
- Vom Peilsender bis zu Galileo - Die Geschichte der Satellitennavigation reicht fast 100 Jahre zurück. bg-special.com, 28. Juni 2005, S. 3, abgerufen am 14. April 2011 (PDF, deutsch).
Satellitengestützte NavigationsystemeGlobale Systeme Historisch:
 Transit ·
Transit ·  Parus/Zikada In Betrieb: GPS
Parus/Zikada In Betrieb: GPS  GLONASS · Im Aufbau:
GLONASS · Im Aufbau:  Compass ·
Compass ·  Galileo
GalileoRegionale Systeme oder regionale Ergänzungssysteme Im Aufbau:
 QZSS · In Planung:
QZSS · In Planung:  IRNSS
IRNSSUnterstützende satellitenbasierte Systeme (SBAS) In Betrieb:
WAAS · MSAS · EGNOS Im Aufbau: GAGAN · SDCMSiehe auch Liste der Navigationssatelliten
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Globales Navigationssystem — Ein Globales Navigationssatellitensystem (engl. Global Navigation Satellite System, GNSS) ist ein System zur Positionsbestimmung und Navigation auf der Erde und in der Luft durch den Empfang von Satellitensignalen und Signalen von Pseudoliten.… … Deutsch Wikipedia
Globales Positionssystem — Ein Globales Navigationssatellitensystem (engl. Global Navigation Satellite System, GNSS) ist ein System zur Positionsbestimmung und Navigation auf der Erde und in der Luft durch den Empfang von Satellitensignalen und Signalen von Pseudoliten.… … Deutsch Wikipedia
GPS-Satellit — Die Artikel GPS Technologie und Global Positioning System überschneiden sich thematisch. Hilf mit, die Artikel besser voneinander abzugrenzen oder zu vereinigen. Beteilige dich dazu an der Diskussion über diese Überschneidungen. Bitte entferne… … Deutsch Wikipedia
GPS Drawing — Die Artikel GPS Technologie und Global Positioning System überschneiden sich thematisch. Hilf mit, die Artikel besser voneinander abzugrenzen oder zu vereinigen. Beteilige dich dazu an der Diskussion über diese Überschneidungen. Bitte entferne… … Deutsch Wikipedia
NAVSTAR — Die Artikel GPS Technologie und Global Positioning System überschneiden sich thematisch. Hilf mit, die Artikel besser voneinander abzugrenzen oder zu vereinigen. Beteilige dich dazu an der Diskussion über diese Überschneidungen. Bitte entferne… … Deutsch Wikipedia
NAVSTAR-GPS — Die Artikel GPS Technologie und Global Positioning System überschneiden sich thematisch. Hilf mit, die Artikel besser voneinander abzugrenzen oder zu vereinigen. Beteilige dich dazu an der Diskussion über diese Überschneidungen. Bitte entferne… … Deutsch Wikipedia
Precise Positioning Service — Die Artikel GPS Technologie und Global Positioning System überschneiden sich thematisch. Hilf mit, die Artikel besser voneinander abzugrenzen oder zu vereinigen. Beteilige dich dazu an der Diskussion über diese Überschneidungen. Bitte entferne… … Deutsch Wikipedia
Differential-GPS — DGPS Referenzantenne (Chokering Antenne) Differential Global Positioning System (DGPS, „Globales Positionssystem (mit) Differential(signal)“) ist eine Bezeichnung für Verfahren, die durch das Ausstrahlen von Korrekturdaten (Bahn und Zeitsystem)… … Deutsch Wikipedia
Differential GPS — DGPS Referenzantenne (Chokering Antenne) Differential Global Positioning System (DGPS, „Globales Positionssystem (mit) Differential(signal)“) ist eine Bezeichnung für Verfahren, die durch das Ausstrahlen von Korrekturdaten (Bahn und Zeitsystem)… … Deutsch Wikipedia
EGNOS — European Geostationary Navigation Overlay Service (EGNOS) ist ein europäisches Differential Global Positioning System (DGPS) als Erweiterungssystem zur Satellitennavigation. Es steigert die Positionsgenauigkeit der Systeme GPS und GLONASS von 10… … Deutsch Wikipedia
Globales Navigationssatellitensystem





18+
© Academic, 2000-2026
- Kontaktieren Sie uns: Unterstützung, Werbung
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.