- Steiner-Regel
-
Der Steinersche Satz (auch: Steiner’scher Satz, Satz von Steiner und Steiner-Regel) geht auf Untersuchungen von Jakob Steiner zurück. Er eignet sich dazu, die Trägheitsmomente, oder den Drehimpuls eines starren Körpers bezüglich einer Rotation um eine Drehachse zu berechnen, die nicht durch den Schwerpunkt des Körpers verläuft. Weiterhin wird der Satz verwendet, um Flächenträgheitsmomente von Balken-Querschnitten zu bestimmen, deren Schwerpunkt nicht im Ursprung des Koordinatensystems liegt.
Der Steinersche Satz sagt aus, dass das Trägheitsmoment eines starren Körpers bezüglich einer beliebigen Drehachse sich als Summe von zwei Trägheitsmomenten schreiben lässt. Der erste dieser beiden Summanden, JSchwerpunkt, ist das Trägheitsmoment eines Massepunktes mit der Masse des Körpers am Schwerpunkt des Körpers bezüglich der Drehachse. Der zweite Summand
 ist das Trägheitsmoment des Körpers bezüglich einer Achse, die parallel zur Drehachse liegt, jedoch so verschoben ist, dass sie durch den Schwerpunkt des Körpers verläuft.
ist das Trägheitsmoment des Körpers bezüglich einer Achse, die parallel zur Drehachse liegt, jedoch so verschoben ist, dass sie durch den Schwerpunkt des Körpers verläuft.Auf diese Weise wird der Einfluss der genauen Form des Körpers von Abhängigkeit von der Lage der Achse getrennt.
Anwendung auf Trägheitsmomente
Die tabellarischen Trägheitsmomente sind nur dann gültig, wenn die Drehachse der geometrischen Achse des Körpers entspricht, das heißt durch den Schwerpunkt geht. Andernfalls kann der Steinersche Satz angewendet werden und das Trägheitsmoment J ergibt sich zu:
Hier ist JSchwerpunkt das Trägheitsmoment der zur Drehachse parallelen Achse durch den Schwerpunkt. m ist die Masse des Körpers und l der Abstand zwischen den parallelen Achsen.
Bei Anwendung des Steinerschen Satzes ist zweierlei zu beachten:
- Das Massenträgheitsmoment eines Körpers ist dann am geringsten, wenn die Drehachse durch den Schwerpunkt geht. Das folgt daraus, dass der Steinersche Anteil stets positiv ist, wenn man eine Verschiebung vom Schwerpunkt weg durchführt.
- Andererseits kann man mit Hilfe des Steinerschen Satzes auch das Massenträgheitsmoment berechnen, wenn das Trägheitsmoment durch eine beliebige Achse gegeben ist.
Anwendung auf Flächenträgheitsmomente
Liegt der Flächenschwerpunkt eines Körper-Querschnitts nicht im Ursprung des Koordinatensystems, kann sein Flächenträgheitsmoment mit dem Steinerschen Satz berechnet werden:
Für Jy wird der Abstand des Flächenschwerpunktes zum Ursprung
 quadriert, mit der Fläche des Querschnitts A multipliziert und auf das (tabellarisch erfasste) Flächenträgheitsmoment addiert. Es ist ersichtlich, dass bei z = 0 der Steiner-Term wegfällt.
quadriert, mit der Fläche des Querschnitts A multipliziert und auf das (tabellarisch erfasste) Flächenträgheitsmoment addiert. Es ist ersichtlich, dass bei z = 0 der Steiner-Term wegfällt.Praktisch ist, dass man mit diesen Formeln komplexe (z. B. T-Träger) in einfache Körper (z. B. Rechtecke) aufteilen kann, deren Flächenträgheitsmoment bereits bekannt ist.
Für Jy gilt dann beispielsweise:
 ,
,
wobei A die Fläche der Figur ist und A1 bis An die durch die Zerlegung entstandenen Teilflächen sind.
Verallgemeinerung durch Trägheitstensoren
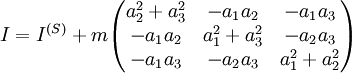
Ist der Trägheitstensor im Schwerpunkt I(S) bekannt, lässt sich der Trägheitstensor I im durch den Vektor
 parallel verschobenen Koordinatensystem durch folgende Formel berechnen.
parallel verschobenen Koordinatensystem durch folgende Formel berechnen.Dabei ist zu beachten, dass in der ersten Formel die Einsteinsche Summenkonvention benutzt wird. Durch die Verschiebung kann es vorkommen, dass die Achsen des neuen Koordinatensystems nicht mehr mit den Hauptträgheitsachsen durch den neuen Punkt zusammenfallen.






Wikimedia Foundation.