- Starrer Körper
-
Ein starrer Körper ist ein physikalisches Modell eines nicht verformbaren Körpers. Hierfür erfolgt eine Idealisierung durch die Annahme, dass zwei beliebige Punkte des Körpers unabhängig von äußeren Kräften immer den gleichen Abstand zueinander besitzen. Der Körper kann eine kontinuierliche Massenverteilung aufweisen, oder ein System von diskreten Massenpunkten sein (z. B. Atome, Moleküle in der Quantenmechanik).
Die Mechanik starrer Körper befasst sich mit der Bewegung starrer Körper unter dem Einfluss äußerer Kräfte. Durch die Modellvoraussetzungen treten dabei ausschließlich Bewegungen des gesamten Körpers in eine Richtung (Translationsbewegungen) und Rotationsbewegungen auf. Zusätzliche Bewegungsformen, wie Schwingungen einzelner Massenpunkte oder Verformungen des Körpers, werden durch die allgemeinere Mechanik fester Körper behandelt.
Ein starrer Körper ohne Translationsbewegung wird als Kreisel bezeichnet.
Inhaltsverzeichnis
Allgemeine Bewegungen starrer Körper
Die Massenpunkte eines starren Körpers haben bezüglich eines körperfesten Bezugssystems zeitlich konstante Raumkoordinaten. Wählt man als Bezugspunkt den Schwerpunkt, so lässt sich die allgemeine Bewegung des Starrkörpers in eine Translation des Schwerpunkts und in eine Rotation um eine Achse durch den Schwerpunkt zerlegen.
Freiheitsgrade und Konfigurationsraum
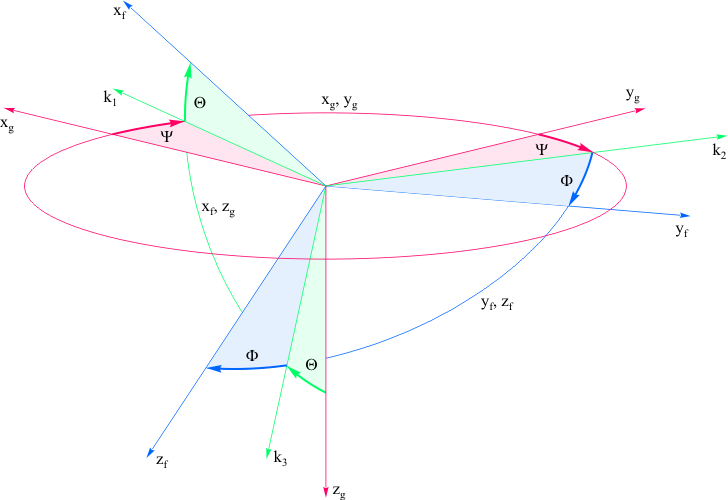
 Eulersche Winkel zur Beschreibung der Orientierung eines flugzeugfesten Koordinatensystems
Eulersche Winkel zur Beschreibung der Orientierung eines flugzeugfesten Koordinatensystems
Die Freiheitsgrade eines n-Teilchen-Systems bilden einen sogenannten Konfigurationsraum. Dieser setzt sich bei starren Körpern aus drei Freiheitsgraden bezüglich der Position und drei weiteren bezüglich der Orientierung zusammen. Neben verschiedenen ortsfesten Koordinatensystemen, die eine Beschreibung der Position erlauben, bieten die Eulerschen Winkel eine Möglichkeit zur Beschreibung der Orientierung, die besonders in der Luft- und Raumfahrt eine wichtige Rolle einnimmt.
Zur Anschauung kann ein freier Körper wie ein (kunstflugtaugliches) Flugzeug herangezogen werden, welches drei Freiheitsgrade einer geradlinigen Bewegung besitzt, da es sich frei in drei Raumdimensionen bewegen kann. Hinzu kommen drei weitere Freiheitsgrade der Drehungen um räumliche (unabhängige) Drehachsen.
Offensichtlich vermindert nun jede Einschränkung der Bewegungmöglichkeit die Anzahl der Freiheitsgrade. Wird beispielsweise ein Massenpunkt des starren Körpers räumlich fixiert, so kann man in diesen den Ursprung des Bezugssystems legen. Damit fallen die drei Freiheitsgrade der Translation weg. Dadurch reduziert sich die Bewegung auf eine reine Änderung der Orientierung und es bleiben nur mehr drei Freiheitsgrade. Wird ein weiterer Punkt festgehalten, so kann der Körper nur noch um eine raumfeste Drehachse rotieren und hat damit nur noch einen Freiheitsgrad, nämlich den Drehwinkel. Legt man schließlich noch einen dritten Punkt des Körpers fest, der sich nicht auf der Achse der ersten zwei Punkte befindet, so verliert er auch den letzten Freiheitsgrad und ist damit bewegungslos. Jede weitere räumliche Fixierung von Punkten führt nunmehr zu einer sogenannten statischen Überbestimmtheit, die in der Statik eine wichtige Rolle spielt.
Lage und Geschwindigkeit
Die Lage eines beliebigen Punkts P erhält man durch Addition des Vektors vom Ursprung des Inertialsystems 0 zum Ursprung des körperfesten Koordinatensystems S und des Vektors vom Ursprung des körperfesten Systems zum Punkt P.[1]
Die Ableitung nach der Zeit ergibt (Eulersche Geschwindigkeitsgleichung):
Dabei ist
 die Winkelgeschwindigkeit des starren Körpers.
die Winkelgeschwindigkeit des starren Körpers.Der Vektor
 ist im körperfesten Koordinatensystem K konstant. Die Umrechnung ins Inertialsystem 0 erfolgt über die Drehmatrix A.
ist im körperfesten Koordinatensystem K konstant. Die Umrechnung ins Inertialsystem 0 erfolgt über die Drehmatrix A.Ansätze zur Bestimmung der Bewegungsgleichung
Nach der Modellvoraussetzung gelten konstante Distanzen zwischen den Teilchen. Aus dem Schwerpunktsatz lassen sich nun einige Folgerungen ziehen:
- Für die Wirkung eines Systems äußerer Kräfte auf einen starren Körper sind nur die resultierende Kraft F und das resultierende Drehmoment M entscheidend. Alle Kräftesysteme mit gleichen Resultierenden sind somit in ihrer Wirkung äquivalent.
- Der Trägheitstensor I eines starren Körpers ist bezüglich eines Schwerpunktsystems konstant.
Häufig werden dem Modell zudem weitere Idealisierungen zugrunde gelegt, die es erlauben sogenannte Erhaltungssätze zur Bestimmung der Bewegungsgleichung einzuführen:
Wird ein abgeschlossenes System angenommen, so folgt aus dem Drehimpulserhaltungssatz, dass der vektorielle Gesamtdrehimpuls L des Systems konstant ist, und es gilt:
dabei bezeichnen:
 den Trägheitstensor des starren Körpers
den Trägheitstensor des starren Körpers- (t) die vektorielle Winkelgeschwindigkeit zum Zeitpunkt t
Die Änderung des Drehimpulses entspricht dem äußeren Moment. Es gilt die Eulersche Gleichung:
Wird ein konservatives Kraftfeld zugrunde gelegt, so folgt aus dem Energieerhaltungssatz, dass die Gesamtenergie E konstant ist, und es gilt:
dabei bezeichnen:
- EKin(t), EPot(t) die kinetische Energie der Translation und die potentielle Energie zum Zeitpunkt t
- ERot(t) die kinetische Energie der Rotation, bzw die Rotationsenergie zum Zeitpunkt t
Drehung eines starren Körpers um eine raumfeste Achse
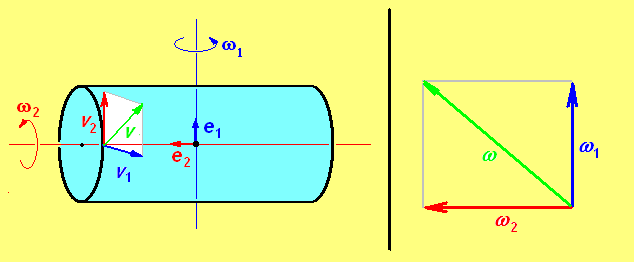
 Rotation eines Zylinders um zwei Achsen und Addition der Winkelgeschwindigkeit.
Rotation eines Zylinders um zwei Achsen und Addition der Winkelgeschwindigkeit.Wird die Drehachse festgelegt, so bleibt der Drehwinkel als einziger Freiheitsgrad der Rotation. Die Rotation wird durch die Winkelgeschwindigkeit ω beschrieben. Diese Größe lässt sich als Vektor schreiben und mit Ort
 und Bahngeschwindigkeit
und Bahngeschwindigkeit  eines Punktes verknüpfen:
eines Punktes verknüpfen:Diese Gleichung gilt genau dann, wenn als Richtung des Vektors
 die Rotationsachse gewählt wird. In Richtung des Vektors gesehen findet dabei die Rotation im Uhrzeigersinn statt.
die Rotationsachse gewählt wird. In Richtung des Vektors gesehen findet dabei die Rotation im Uhrzeigersinn statt.Wenn ein Körper um zwei Achsen rotiert, lassen sich für beide Achsen Vektoren zur Winkelgeschwindigkeit definieren. Ihre Summe ergibt dann die Gesamtrotation des Körpers. Es findet also insgesamt nur eine Rotation um eine Achse statt. Damit ist gewährleistet, dass die Winkelgeschwindigkeit als Vektor additiv ist und es daher sinnvoll ist, diese Größe als Vektor darzustellen.
Literatur
- Beziehungen zwischen kinematischen Grundgrößen starrer Körper. www.sprott.net, abgerufen am 12. Oktober 2011.
Einzelnachweise
- ↑ Georg Rill, Thomas Schaeffer: Grundlagen und Methodik der Mehrkörpersimulation. Vieweg + Teubner, Wiesbaden 2010, ISBN 978-3-8348-0888-2, Seite 20ff. Digitalisat (PDF; 448 KB)







Wikimedia Foundation.