- Hesseform
-
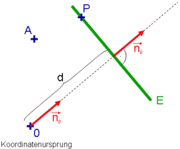 Darstellung von Normale und Abstand der hesseschen Normalform
Darstellung von Normale und Abstand der hesseschen NormalformDie hessesche Normalform (Hesse-Normalenform), benannt nach Ludwig Otto Hesse, ist in der analytischen Geometrie eine Gleichung, die eine Ebene (E) im euklidischen Raum
 oder eine Gerade (g) im
oder eine Gerade (g) im  beschreibt und hauptsächlich für Abstandsberechnungen verwendet wird. In vektorieller Schreibweise lautet sie
beschreibt und hauptsächlich für Abstandsberechnungen verwendet wird. In vektorieller Schreibweise lautet sie .
.
Ein Punkt P, der in einem gegebenen Koordinatensystem den Ortsvektor
 hat, liegt genau dann in der Ebene E (auf der Geraden g), wenn diese Gleichung erfüllt ist.
hat, liegt genau dann in der Ebene E (auf der Geraden g), wenn diese Gleichung erfüllt ist.Dabei steht
 für den normierten Normalenvektor (Normaleneinheitsvektor) von E bzw. g, der vom Koordinatenursprung zur Ebene bzw. Geraden zeigt.
für den normierten Normalenvektor (Normaleneinheitsvektor) von E bzw. g, der vom Koordinatenursprung zur Ebene bzw. Geraden zeigt.  ist der Abstand der Ebene (der Geraden) vom Ursprung des Koordinatensystems. Das Multiplikationszeichen
ist der Abstand der Ebene (der Geraden) vom Ursprung des Koordinatensystems. Das Multiplikationszeichen  drückt ein Skalarprodukt aus.
drückt ein Skalarprodukt aus.Inhaltsverzeichnis
Herleitung/Berechnung aus der Normalgleichung
Vorbemerkung: Aus Gründen der Einfachheit ist im Folgenden jeweils von einer Ebene die Rede. Die Überlegungen lassen sich aber auf den Fall einer Geraden übertragen.
In der Normalgleichung
 ,
,
ist die Ebene durch einen Normalenvektor
 sowie einen beliebigen Ortsvektor
sowie einen beliebigen Ortsvektor  eines Punktes
eines Punktes  gegeben. Die Richtung von sei so gewählt, dass
gegeben. Die Richtung von sei so gewählt, dass ist.
ist.
Indem man
durch seinen Betrag  dividiert, erhält man den normierten Normalenvektor
dividiert, erhält man den normierten Normalenvektorund es gilt
 .
.
Indem man
berechnet, erhält man die hessesche Normalform
- .
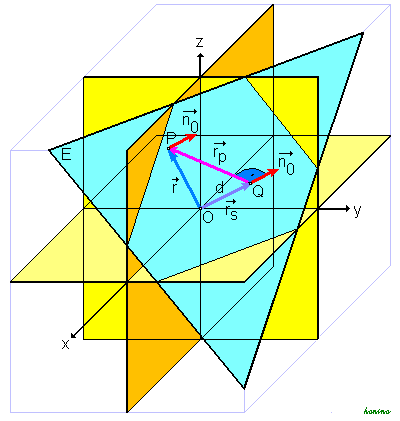
d ist hierin der Abstand vom Ursprung. Da
 für jeden Punkt der Ebene gilt, gilt es insbesondere auch für den Punkt Q (Fußpunkt des Lotes vom Ursprung auf die Ebene E) mit
für jeden Punkt der Ebene gilt, gilt es insbesondere auch für den Punkt Q (Fußpunkt des Lotes vom Ursprung auf die Ebene E) mit  . Dann ist nach Definition des Skalarproduktes
. Dann ist nach Definition des Skalarproduktes .
.
Der Betrag
 von
von  ist aber der Abstand der Ebene vom Ursprung.
ist aber der Abstand der Ebene vom Ursprung.Berechnung aus drei Ortsvektoren über ein Gleichungssystem
Sind die Ortsvektoren
,  und
und  von drei Punkten A, B und C der Ebene gegeben, die nicht auf einer Geraden liegen, und will man daraus die hessesche Normalform berechnen, wertet man die folgenden Gleichungen aus:
von drei Punkten A, B und C der Ebene gegeben, die nicht auf einer Geraden liegen, und will man daraus die hessesche Normalform berechnen, wertet man die folgenden Gleichungen aus:Dieses Gleichungssystem wird erst dadurch eindeutig lösbar, dass man als zusätzliche Bedingung die Normierung
also
verlangt. Einfacher ist es, den übrig behaltenen Freiheitsgrad, nämlich den Betrag (die l2-Norm)
des Vektors zunächst beliebig zu wählen und dann zu normieren, indem man durch dividiert.Beispiel
 .
.
Zu lösen ist folgendes Gleichungssystem:
- − n1 − n2 + n3 = 0
- − 2n1 + n2 = 0
Lösung:
Hessesche Normalform:
Berechnung über das Kreuzprodukt
Ein anderer Weg zur Berechnung des Normalenvektors führt über das Kreuzprodukt der beiden Richtungsvektoren. Man erhält in diesem Falle ein eindeutiges Ergebnis
 ,
,
wobei man aber auch hier im Allgemeinen
noch normieren muss:Nun gilt:
-

 (Definition des Skalarprodukts)
(Definition des Skalarprodukts)- Da auf die Länge 1 normiert ist, kann man schreiben:
 .
.
Also ergibt sich aus
 schließlich wieder der Abstand der Ebene zum Nullpunkt. Diese Abstandsberechnung ist ein wichtiges Anwendungsgebiet der hesseschen Normalform.
schließlich wieder der Abstand der Ebene zum Nullpunkt. Diese Abstandsberechnung ist ein wichtiges Anwendungsgebiet der hesseschen Normalform.Anwendung zur Abstandsberechnung
Allgemein erhält man den Abstand s eines beliebigen Punktes P von der Ebene E, indem man den Ortsvektor
 von P für in die linke Seite der hesseschen Normalform einsetzt:
von P für in die linke Seite der hesseschen Normalform einsetzt:Ist s < 0, so liegt P in demselben Halbraum von E wie der Ursprung, bei positivem Vorzeichen von s hingegen im anderen Halbraum.
Verallgemeinerung
Die hessesche Normalform (nicht aber die Berechnung über das Kreuzprodukt) kann man ganz allgemein zur Beschreibung (n-1)-dimensionaler Hyperebenen im n-dimensionalen Raum verwenden.
Siehe auch










Wikimedia Foundation.