- Ortsvektor
-
Als Ortsvektor (oder Radiusvektor)[1] eines Punktes bezeichnet man in der Mathematik und in der Physik einen Vektor, der von einem festen Bezugspunkt zu diesem Punkt (Ort) zeigt. In der elementaren und der synthetischen Geometrie können diese Vektoren als Klassen von verschiebungsgleichen Pfeilen oder gleichwertig als Parallelverschiebungen definiert werden. Vertiefende Informationen finden sich im Hauptartikel Affine Translationsebene.
Ortsvektoren ermöglichen es, für die Beschreibung von Punkten, von Punktmengen und von Abbildungen die Vektorrechnung zu benutzen. Legt man ein kartesisches Koordinatensystem zu Grunde, dann wählt man in der Regel den Koordinatenursprung als Bezugspunkt für die Ortsvektoren der Punkte. In diesem Fall stimmen die Koordinaten eines Punktes bezüglich dieses Koordinatensystems mit den Koordinaten seines Ortsvektors überein.
In der analytischen Geometrie werden Ortsvektoren verwendet um Abbildungen eines affinen oder euklidischen Raums zu beschreiben und um Punktmengen (wie zum Beispiel Geraden und Ebenen) durch Gleichungen und Parameterdarstellungen zu beschreiben.
In der Physik werden Ortsvektoren verwendet um die Bewegung eines (oft als punktförmig) gedachten Körpers zu beschreiben.
Inhaltsverzeichnis
Schreibweisen
In der Geometrie wird der Bezugspunkt (Ursprung) in der Regel mit O (für lat. origo) bezeichnet. Die Schreibweise für den Ortsvektor eines Punktes P ist dann
 .
.
Gelegentlich werden auch die Kleinbuchstaben mit Vektorpfeil benutzt, die den Großbuchstaben entsprechen, mit denen die Punkte bezeichnet werden, zum Beispiel
 .
.
In der Physik wird der Ortsvektor Radiusvektor genannt und als oder
oder  geschrieben.
geschrieben.Beispiele und Anwendungen in der Geometrie
Verbindungsvektor
Für den Verbindungsvektor
 zweier Punkte P und Q mit den Ortsvektoren
zweier Punkte P und Q mit den Ortsvektoren  und
und  gilt
giltKartesische Koordinaten
Der Ortsvektor
des Punkts P(p1 | p2 | p3) hat die KoordinatenVerschiebung
Eine Verschiebung um den Vektor
 bildet den Punkt X auf den Punkt
bildet den Punkt X auf den Punkt  ab. Dann gilt für die Ortsvektoren
ab. Dann gilt für die Ortsvektoren bzw.
bzw. 
Drehung um den Ursprung
Eine Drehung in der Ebene mit Drehzentrum O um den Winkel ϕ gegen den Uhrzeigersinn kann in kartesischen Koordinaten wie folgt mit Hilfe einer Drehmatrix beschrieben werden: Ist
 der Ortsvektor eines Punktes X und
der Ortsvektor eines Punktes X und  der Ortsvektor des Bildpunkts
der Ortsvektor des Bildpunkts  , so gilt:
, so gilt:Parameterdarstellung einer Geraden
Die Gerade durch die Punkte P und Q enthält genau die Punkte X, deren Ortsvektor
 eine Darstellung
eine Darstellung mit
mit 
besitzt.
Normalenform der Ebenengleichung
Die Ebene durch den Punkt P (Stützpunkt) mit Normalenvektor
 enthält genau die Punkte X, deren Ortsvektor die Gleichung
enthält genau die Punkte X, deren Ortsvektor die Gleichungerfüllt. Dabei ist
 der Ortsvektor des Stützpunkts P (Stützvektor), der Malpunkt bezeichnet das Skalarprodukt.
der Ortsvektor des Stützpunkts P (Stützvektor), der Malpunkt bezeichnet das Skalarprodukt.Ortsvektor in verschiedenen Koordinatensystemen
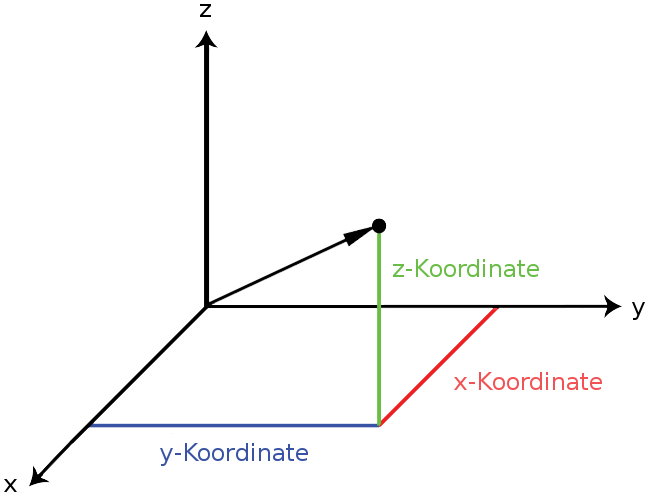
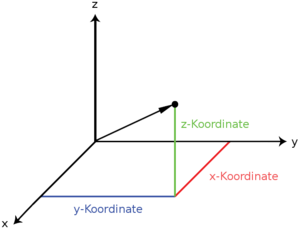 Kartesisches Koordinatensystem
Kartesisches Koordinatensystem
Der durch einen Ortsvektor beschriebene Punkt kann durch die Koordinaten eines Koordinatensystems ausgedrückt werden, wobei der Bezugspunkt des Ortsvektors normalerweise in den Koordinatenursprung gelegt wird.
Kartesische Koordinaten
Üblicherweise wird der Ortsvektor in kartesischen Koordinaten in der Form
definiert. Daher sind die kartesischen Koordinaten gleichzeitig die Komponenten des Ortsvektors.
Zylinderkoordinaten
Der Ortsvektor als Funktion von Zylinderkoordinaten ergibt sich durch Umrechnen der Zylinderkoordinaten in die entsprechenden kartesischen Koordinaten zu
Hier bezeichnet R den Abstand des Punktes von der z-Achse, der Winkel ϕ wird von der x-Achse in Richtung der y-Achse gezählt. R und ϕ sind als die Polarkoordinaten des orthogonal auf die x-y-Ebene projizierten Punkts.
Kugelkoordinaten
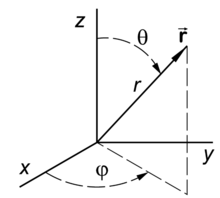
Der Ortsvektor als Funktion von Kugelkoordinaten ergibt sich durch Umrechnen der Kugelkoordinaten in die entsprechenden kartesischen Koordinaten zu
Hierbei bezeichnet r den Abstand des Punkts vom Ursprung (also die Länge des Ortsvektors), der Winkel ϕ wird in der x-y-Ebene von der x-Achse aus in Richtung der y-Achse gemessen, der Winkel θ ist der Winkel zwischen der z-Achse und dem Ortsvektor.
Basisvektoren
Die Basisvektoren in den verschiedenen Koordinatensystemen ergeben sich durch Normierung der partiellen Ableitungen des Ortsvektors nach den jeweiligen Koordinaten. Allgemein ergibt sich der zur Koordinate k gehörende Basisvektor zu
Kartesische Koordinaten
Die Basisvektoren
 ,
,  und
und  sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.Zylinderkoordinaten
Die Basisvektoren
 ,
,  und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.Kugelkoordinaten
Die Basisvektoren
 ,
,  und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.Wegelement
Ein Wegelement oder Linienelement
 kann als totales Differential
kann als totales Differential  des Ortsvektors dargestellt werden. Allgemein ergibt sich für das vektorielle Wegelement bei Verwendung der Koordinaten
des Ortsvektors dargestellt werden. Allgemein ergibt sich für das vektorielle Wegelement bei Verwendung der Koordinaten  :
:Mit der obenstehenden Gleichung für die Basisvektoren kann man auch schreiben
Die Beträge der Ableitungen des Ortsvektors
nach den Koordinaten heißen metrische KoeffizientenDamit kann man das vektorielle Wegelement in der Form
darstellen. Für die bisher betrachteten Koordinatensysteme ergeben sich daraus die folgenden Darstellungsformen:
- Kartesische Koordinaten:
- Zylinderkoordinaten:
- Kugelkoordinaten:
Relativistische Koordinaten
In der speziellen Relativitätstheorie (SRT) werden Raum und Zeit als eine zusammenhängende, vierdimensionale pseudoriemannsche Mannigfaltigkeit, der sogenannten Raumzeit, beschrieben. Ein Punkt auf dieser Mannigfaltigkeit, der durch 3 Raumkoordinaten und eine Zeitkoordinate festgelegt wird, wird als Ereignis bezeichnet. Für jeweils zwei Ereignisse kann durch die Minkowski-Metrik ein Linienelement ds definiert werden, welches zur Eigenzeit proportional ist.
- ds2 = ημνdxμdxν = c2dt2 − dx2 − dy2 − dz2.
Hierbei bezeichnet ημν = diag(1, − 1, − 1, − 1) die Minkowski-Metrik und dxμ das Vierervektordifferential.
Physik
Trajektorie
In der Physik wird die Bewegung eines Punktes (zum Beispiel eines Massenpunkts oder des Schwerpunkts eines Körpers) durch eine Funktion beschrieben, die jedem Zeitpunkt t den Ortsvektor
 des Massenpunkts zum Zeitpunkt t zuordnet. Die so beschriebene Kurve heißt auch Trajektorie oder Bahnkurve.
des Massenpunkts zum Zeitpunkt t zuordnet. Die so beschriebene Kurve heißt auch Trajektorie oder Bahnkurve.Die Ableitung dieser vektorwertigen Funktion
nach der Zeit t ergibt den Geschwindigkeitsvektor .
.
Durch nochmalige Ableitung ergibt sich der Beschleunigungsvektor
 .
.
Für die Länge des zwischen den Zeitpunkten t1 und t2 zurückgelegten Weges gilt
Himmelsmechanik
Um die Position eines Himmelskörpers, der sich auf einer Umlaufbahn um ein Schwerezentrum bewegt, anzugeben, wird in der Himmelsmechanik als Ursprung des Ort- oder Radiusvektors dieses Schwerezentrum gewählt. Der Radiusvektor liegt dann stets in Richtung der Gravitationslinie. Die Strecke des Ortsvektors wird Fahrstrahl genannt. Der Fahrstrahl spielt eine zentrale Rolle beim zweiten keplerschen Gesetz (Flächensatz).
Siehe auch
Einzelnachweise
- ↑ Istvan Szabó: Einführung in die Technische Mechanik, Springer, 1999, ISBN 3-540-44248-0, S. 12
Literatur
- Alexander Heigl: Mathematische Einführung in die Elektrizitätslehre (PDF, 634 kB). Lehrstuhl für Technische Elektrophysik, Technische Universität München. 18. Oktober 2006.
- Klaus Desch: Mathematische Ergaenzungen zur Physik II, Kapitel 11: Vektoranalysis (PDF, 210 kB). Institut für Experimentalphysik, Hamburg.




















Wikimedia Foundation.