- Kreuzprodukt
-
 Kreuzprodukt
Kreuzprodukt
Das Kreuzprodukt (auch Vektorprodukt, vektorielles Produkt oder äußeres Produkt genannt) ist eine Verknüpfung im dreidimensionalen euklidischen Vektorraum, die zwei Vektoren wieder einen Vektor zuordnet. Um es von anderen Produkten, insbesondere vom Skalarprodukt, zu unterscheiden, wird es mit einem Malkreuz als Multiplikationszeichen geschrieben.
Das Kreuzprodukt der Vektoren
 und
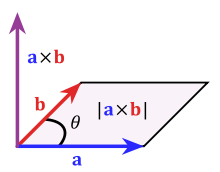
und  ist ein Vektor, der senkrecht auf der von den beiden Vektoren aufgespannten Ebene steht und mit ihnen ein Rechtssystem bildet. Die Länge dieses Vektors entspricht dem Flächeninhalt des Parallelogramms, das von den Vektoren und aufgespannt wird.
ist ein Vektor, der senkrecht auf der von den beiden Vektoren aufgespannten Ebene steht und mit ihnen ein Rechtssystem bildet. Die Länge dieses Vektors entspricht dem Flächeninhalt des Parallelogramms, das von den Vektoren und aufgespannt wird.In der Physik tritt das Kreuzprodukt beispielsweise bei der Berechnung der Lorentzkraft sowie in diversen Drehgrößen wie Drehmoment, Drehimpuls usw. auf.
Inhaltsverzeichnis
Geometrische Definition
 Rechte-Hand-Regel
Rechte-Hand-RegelDas Kreuzprodukt
 von zwei Vektoren und im dreidimensionalen Anschauungsraum ist ein Vektor, der orthogonal zu und , und damit zu der von und aufgespannten Ebene ist.
von zwei Vektoren und im dreidimensionalen Anschauungsraum ist ein Vektor, der orthogonal zu und , und damit zu der von und aufgespannten Ebene ist.Dieser Vektor ist so orientiert, dass
, und in dieser Reihenfolge ein Rechtssystem bilden, das heißt,  und verhalten sich wie Daumen, Zeigefinger und abgespreizter Mittelfinger der rechten Hand (Rechte-Hand-Regel).
und verhalten sich wie Daumen, Zeigefinger und abgespreizter Mittelfinger der rechten Hand (Rechte-Hand-Regel).
Der Betrag von
gibt den Flächeninhalt des von und aufgespannten Parallelogramms an. Ausgedrückt durch den von und eingeschlossenen Winkel θ giltDabei bezeichnen
 und
und  die Längen der Vektoren
die Längen der Vektoren  und
und  , und
, und  ist der Sinus des von ihnen eingeschlossenen Winkels θ.
ist der Sinus des von ihnen eingeschlossenen Winkels θ.Zusammenfassend gilt also
wobei der Vektor
 derjenige zu und senkrechte Einheitsvektor ist, der diese zu einem Rechtssystem ergänzt.
derjenige zu und senkrechte Einheitsvektor ist, der diese zu einem Rechtssystem ergänzt.Begriff und Schreibweisen
In verschiedenen Ländern sind für das Vektorprodukt zum Teil verschiedene Schreibweisen gebräuchlich. Im englisch- und deutschsprachigen Raum wird für das Vektorprodukt zweier Vektoren
und für gewöhnlich die Schreibweise verwendet, in Frankreich wird dagegen die Schreibweise  bevorzugt. In Russland wird das Vektorprodukt oft in der Schreibweise
bevorzugt. In Russland wird das Vektorprodukt oft in der Schreibweise ![\left[\vec{a}\ \vec{b}\right]](7/a375356d71e8b171fc1457d948009851.png) oder
oder ![\left[\vec{a},\vec{b}\right]](c/75c4b67026239c5219a6e08324372463.png) notiert.
notiert.Die Schreibweise
und die Bezeichnung äußeres Produkt werden nicht nur für das Vektorprodukt verwendet, sondern auch für die Verknüpfung, die zwei Vektoren einen sogenannten Bivektor zuordnet, siehe Graßmann-Algebra.Komponentenweise Berechnung
In rechtshändigen kartesischen Koordinaten bzw. im reellen Koordinatenraum
 mit dem Standardskalarprodukt und der Standardorientierung gilt für das Kreuzprodukt:
mit dem Standardskalarprodukt und der Standardorientierung gilt für das Kreuzprodukt:Ein Zahlenbeispiel:
Eine Merkregel für diese Formel beruht auf einer „symbolischen Determinantenschreibweise“. Dabei notiert man eine
 -Matrix, in deren erster Spalte die Symbole
-Matrix, in deren erster Spalte die Symbole  ,
,  und
und  für die Standardbasis stehen. Die zweite Spalte wird von den Komponenten des Vektors und die dritte von denen des Vektors gebildet. Diese Determinante berechnet man nach den üblichen Regeln, zum Beispiel indem man sie nach der ersten Spalte entwickelt
für die Standardbasis stehen. Die zweite Spalte wird von den Komponenten des Vektors und die dritte von denen des Vektors gebildet. Diese Determinante berechnet man nach den üblichen Regeln, zum Beispiel indem man sie nach der ersten Spalte entwickeltoder mit Hilfe der Regel von Sarrus:
Mit dem Levi-Civita-Symbol εijk schreiben sich die Komponenten als
Eigenschaften
Das Kreuzprodukt ist bilinear, für alle Zahlen α, β und γ und alle Vektoren
, und  gilt
giltDa die Fläche jedes Parallelogramms, das ein Vektor mit sich selbst aufspannt, verschwindet
ist das Kreuzprodukt antisymmetrisch,
Bei Vertauschung der Vektoren ändert sich also das Vorzeichen. Das Kreuzprodukt ist antikommutativ oder schiefsymmetrisch.
Für jeden Vektor
 gilt
gilt ,
,
wobei der Malpunkt das Skalarprodukt bezeichnet. Durch diese Bedingung ist das Kreuzprodukt eindeutig bestimmt.
Doppeltes Kreuzprodukt
Graßmann-Identität
Das Kreuzprodukt ist nicht assoziativ. Die Graßmann-Identität (nach Hermann Graßmann), auch Graßmannscher Entwicklungssatz genannt, für das wiederholte Kreuzprodukt von drei Vektoren lautet
Sie heißt auch BAC-CAB-Formel, wobei der Name das Ergebnis ausspricht.
Jacobi-Identität
Außerdem gilt die Jacobi-Identität, dass die zyklische Summe wiederholter Kreuzprodukte verschwindet:
Doppeltes Kreuzprodukt mit Nabla-Operatoren
Ist
 der Nabla-Operator, so lässt sich der Graßmann'sche Entwicklungssatz nicht einfach übertragen, da Nabla stets nach rechts auf
der Nabla-Operator, so lässt sich der Graßmann'sche Entwicklungssatz nicht einfach übertragen, da Nabla stets nach rechts auf  wirkt (Notation im Folgenden:
wirkt (Notation im Folgenden:  differenziert nur die Komponenten des Vektors und
differenziert nur die Komponenten des Vektors und  ist der Vektorgradient, also die Jacobi-Matrix von ):
ist der Vektorgradient, also die Jacobi-Matrix von ):Daher gilt, falls
 und der Nabla-Operator und ein Vektorfeld ist, in der Form:
und der Nabla-Operator und ein Vektorfeld ist, in der Form:Für die Rotation des Kreuzprodukts zweier Vektorfelder
 und
und  gilt hingegen:
gilt hingegen:Die zusätzlichen Terme entstehen, weil die Ableitung eines Produktes nach der Produktregel zwei Terme ergibt.
Lagrange-Identität
Für das Skalarprodukt von zwei Kreuzprodukten gilt
Für das Quadrat der Norm erhält man hieraus
also ist der Betrag des Kreuzproduktes
Da θ, der Winkel zwischen
und , immer zwischen 0° und 180° liegt, ist 
Spatprodukt
Die Kombination von Kreuz- und Skalarprodukt in der Form
wird als Spatprodukt bezeichnet. Das Ergebnis ist eine Zahl, die dem orientierten Volumen des durch die drei Vektoren aufgespannten Spats (Parallelepipeds) entspricht.
Zusammenhang mit Lie-Algebra
Das Kreuzprodukt lässt sich für beliebige Körper K für den K-Vektorraum K3 definieren. Dieser bildet dann mit dem Kreuzprodukt eine Lie-Algebra.
Polare und axiale Vektoren
Bei der Anwendung des Kreuzprodukts auf vektorielle physikalische Größen spielt die Unterscheidung in polare Vektoren (das sind solche, die sich wie Differenzen zweier Ortsvektoren verhalten, zum Beispiel Geschwindigkeit, Beschleunigung, Kraft, elektrische Feldstärke) und axiale Vektoren (die sich wie Drehachsen verhalten, zum Beispiel Winkelgeschwindigkeit, Drehmoment, Drehimpuls, magnetische Flussdichte) eine Rolle. Polaren Vektoren ordnet man die Signatur (oder Parität) +1 zu, axialen Vektoren die Signatur -1.
Bei der vektoriellen Multiplikation mit einem polaren Vektor
wechseln Vektoren ihre Signatur: Ist ein polarer Vektor, so ist  ein axialer; ist ein axialer Vektor, so ist ein polarer. Bei der vektoriellen Multiplikation mit einem axialen Vektor bleibt dagegen die Signatur erhalten.
ein axialer; ist ein axialer Vektor, so ist ein polarer. Bei der vektoriellen Multiplikation mit einem axialen Vektor bleibt dagegen die Signatur erhalten.Kreuzprodukt im

Das Kreuzprodukt lässt sich für beliebige Dimension
 auf den verallgemeinern. Dabei ist das Kreuzprodukt im kein Produkt von zwei Faktoren, sondern von n − 1 Faktoren.
auf den verallgemeinern. Dabei ist das Kreuzprodukt im kein Produkt von zwei Faktoren, sondern von n − 1 Faktoren.Das Kreuzprodukt
 der Vektoren
der Vektoren  ist dadurch charakterisiert, dass für jeden Vektor
ist dadurch charakterisiert, dass für jeden Vektor  gilt
giltIn Koordinaten lässt sich das Kreuzprodukt im
 wie folgt berechnen. Es sei
wie folgt berechnen. Es sei  der zugehörige i-te kanonische Einheitsvektor. Für n − 1 Vektoren
der zugehörige i-te kanonische Einheitsvektor. Für n − 1 Vektorengilt
analog zu der oben erwähnten symbolischen Berechnung mit Hilfe einer Determinante.
Der Vektor
ist orthogonal zu  . Die Orientierung ist so, dass die Vektoren
. Die Orientierung ist so, dass die Vektoren  in dieser Reihenfolge ein Rechtssystem bilden. Der Betrag von ist gleich dem (n − 1)-dimensionalen Volumen des von aufgespannten Parallelotops.
in dieser Reihenfolge ein Rechtssystem bilden. Der Betrag von ist gleich dem (n − 1)-dimensionalen Volumen des von aufgespannten Parallelotops.Für n = 2 erhält man dabei kein Produkt, sondern nur eine lineare Abbildung
 ,
,
die Rotation um 90° im Uhrzeigersinn.
Eine noch weitergehende Verallgemeinerung führt auf die Graßmann-Algebren.
Weblinks
 Wiktionary: Kreuzprodukt – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Kreuzprodukt – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen- Java-Applet der Universität von Syracuse zum Vektor- oder Kreuzprodukt
- Kreuzprodukt-Rechner: Berechnet einfach das Kreuzprodukt von zwei Vektoren
Literatur
- Gerd Fischer: Lineare Algebra, Vieweg-Verlag, ISBN 3-528-97217-3.

























Wikimedia Foundation.