- Ebene (Mathematik)
-
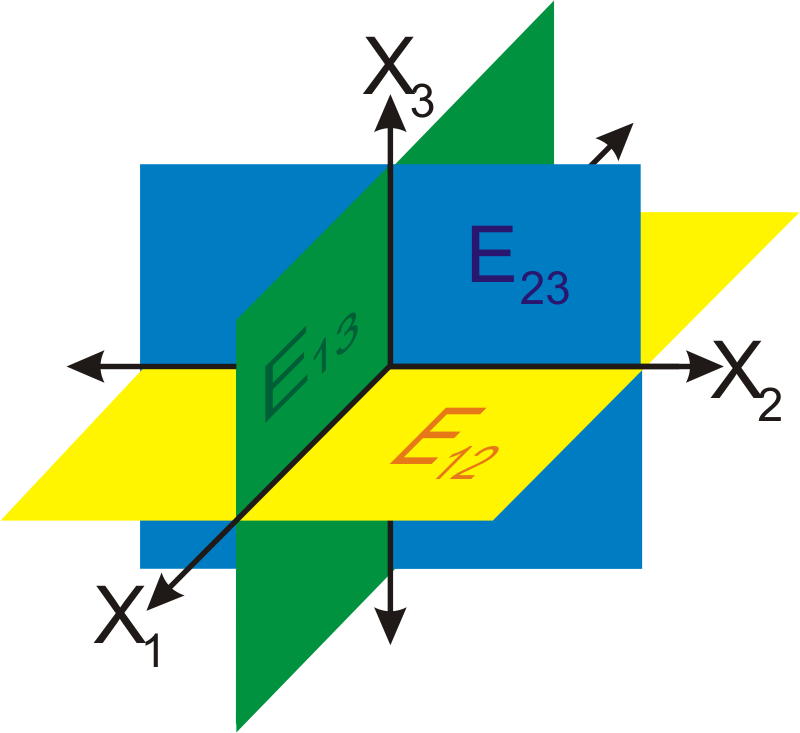
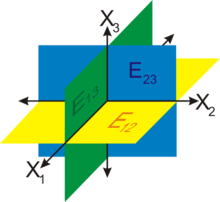 Die 3 Koordinatenebenen
Die 3 Koordinatenebenen
Die Ebene ist ein Grundbegriff der Geometrie. Allgemein handelt es sich um ein unbegrenzt ausgedehntes flaches zweidimensionales Objekt.
- Hierbei bedeutet unbegrenzt ausgedehnt und flach, dass zu je zwei Punkten auch eine durch diese verlaufende Gerade vollständig in der Ebene liegt.
- Zweidimensional bedeutet, dass – abgesehen von enthaltenen Geraden – kein echter Teilraum ebenfalls diese Eigenschaft hat.
Konkreter bezeichnet man mit Ebene, je nach Teilgebiet der Mathematik, allerdings durchaus verschiedene Objekte.
Inhaltsverzeichnis
Ebene als eigenständiges Objekt
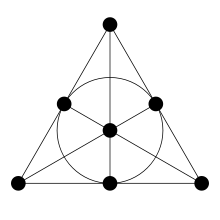 kleinste projektive Ebene (sieben Punkte, sieben Geraden)
kleinste projektive Ebene (sieben Punkte, sieben Geraden)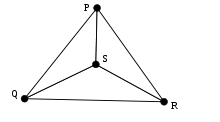 kleinste affine Ebene (vier Punkte, sechs Geraden)
kleinste affine Ebene (vier Punkte, sechs Geraden)Der klassische Ebenenbegriff nach Euklid
In der klassischen Geometrie etwa im Sinne von Euklids Elementen bildet die (euklidische) Ebene – in diesem Zusammenhang üblicherweise mit dem bestimmten Artikel bezeichnet – den Rahmen geometrischer Untersuchungen, etwa für Konstruktionen mit Zirkel und Lineal. Man kann sie sich vorstellen als Abstraktion der Zeichenebene (Papier) als unendlich ausgedehnt und unendlich flach, so wie die Gerade eine als unendlich dünn und unendlich lang vorgestellte Abstraktion des gezeichneten Strichs (Bleistiftlinie) ist. Die euklidische Geometrie wird heutzutage durch Hilberts Axiomensystem der euklidischen Geometrie beschrieben.
Seit Descartes die euklidische Ebene mit Koordinaten versehen hat, kann man die euklidische Ebene identifizieren mit der Menge
 aller Paare reeller Zahlen. Oder andersherum: bildet ein Modell für die Hilbertschen Axiome der Ebene. Dieser reelle Vektorraum wird daher ebenfalls als Ebene bezeichnet.
aller Paare reeller Zahlen. Oder andersherum: bildet ein Modell für die Hilbertschen Axiome der Ebene. Dieser reelle Vektorraum wird daher ebenfalls als Ebene bezeichnet.Die Projektive Ebene
Ergänzt man Euklids affine Ebene um eine unendlich ferne Gerade und auf ihr liegende unendlich ferne Punkte, erhält man eine projektive Ebene.
Auch die projektive Ebene lässt sich algebraisch beschreiben, nämlich als die Menge aller eindimensionalen Unterräume im
 . Man fasst also die durch den Ursprung verlaufenden Geraden als Punkte der projektiven Ebene auf. Die Geraden der projektiven Ebene sind dann genau die zweidimensionalen Untervektorräume von , also die durch den Ursprung verlaufenden „herkömmlichen“ Ebenen.
. Man fasst also die durch den Ursprung verlaufenden Geraden als Punkte der projektiven Ebene auf. Die Geraden der projektiven Ebene sind dann genau die zweidimensionalen Untervektorräume von , also die durch den Ursprung verlaufenden „herkömmlichen“ Ebenen.Verallgemeinerungen
Schwächt man das Hilbertsche Axiomensystem ab, so sind sogar endliche Strukturen möglich, die auch als affine oder projektive Ebene bezeichnet werden. Die Abbildung rechts zeigt eine endliche projektive Ebene mit sieben Punkten und sieben Geraden. Durch Entfernen einer beliebigen Gerade und der auf ihr liegenden Punkte erhält man eine endliche affine Ebene mit vier Punkten und sechs Geraden.
In Verallgemeinerung des kartesischen Modells der euklidischen Ebene wird auch für beliebige Körper K der zweidimensionale Vektorraum K2 als affine Ebene bezeichnet; entsprechend für die projektive Ebene. Man beachte: Ist K der Körper
 der komplexen Zahlen, die ja durch die Gaußsche Zahlenebene veranschaulicht werden, so ist bereits (reell) zweidimensional, wird aber als komplexe Gerade bezeichnet. Die Ebene
der komplexen Zahlen, die ja durch die Gaußsche Zahlenebene veranschaulicht werden, so ist bereits (reell) zweidimensional, wird aber als komplexe Gerade bezeichnet. Die Ebene  ist reell vierdimensional, aber nur ein zweidimensionaler komplexer Vektorraum. Der Körper K kann auch ein endlicher Körper sein. Im Fall
ist reell vierdimensional, aber nur ein zweidimensionaler komplexer Vektorraum. Der Körper K kann auch ein endlicher Körper sein. Im Fall  erhält man die oben beschriebene kleinste endliche affine Ebene mit vier Punkten bzw. die projektive Ebene mit sieben Punkten.
erhält man die oben beschriebene kleinste endliche affine Ebene mit vier Punkten bzw. die projektive Ebene mit sieben Punkten.Eine Fläche im Sinne der Topologie ist die Ebene (auch die projektive) nur im Fall
 ; im Falle
; im Falle  handelt es sich immerhin noch um eine differenzierbare Mannigfaltigkeit.
handelt es sich immerhin noch um eine differenzierbare Mannigfaltigkeit.Ebene als Teilraum
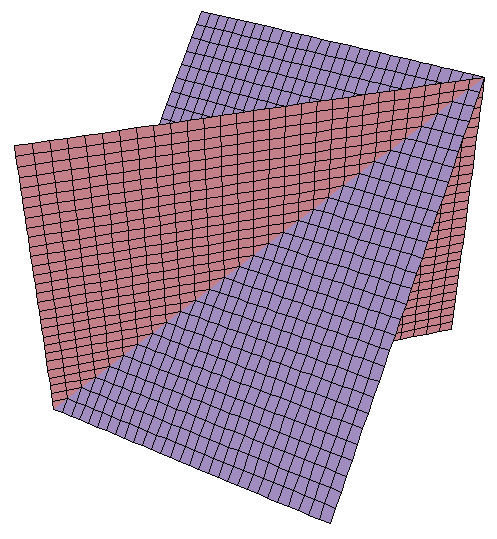
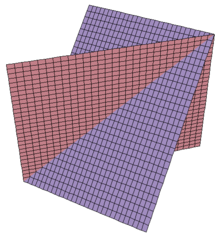 Zwei sich schneidende Ebenen
Zwei sich schneidende EbenenBetrachtet man höherdimensionale geometrische Räume, so bezeichnet man jeden Teilraum, der isomorph zu einer Ebene im obigen Sinne ist, als eine Ebene. In einem dreidimensionalen Euklidischen Raum ist eine Ebene dabei festgelegt durch
- drei nicht kollineare Punkte
- eine Gerade und einen nicht auf ihr liegenden Punkt
- zwei sich schneidende Geraden oder
- zwei echt parallele Geraden
Liegen zwei Geraden windschief zueinander, so liegen sie dagegen nicht in einer gemeinsamen Ebene. Stattdessen gibt es dann zwei parallele Ebenen, deren jede je eine der Geraden enthält.
Zwei Ebenen sind entweder parallel, schneiden sich in einer Geraden oder sind identisch. Sie können im (dreidimensionalen) Raum also nicht windschief zueinander liegen. Im ersten Fall ist jede zur ersten Ebene senkrechte Gerade auch senkrecht zur zweiten. Die Länge der Strecke, die die Ebenen auf solch einer Geraden begrenzen, bezeichnet man als den Abstand der Ebenen. Im zweiten Fall betrachtet man eine zur Schnittgeraden senkrechte Ebene. Mit dieser schneiden sich die beiden ersten Ebenen in zwei Geraden. Den Winkel zwischen diesen Geraden bezeichnet man als Winkel zwischen den beiden Ebenen.
Jeder zweidimensionale Untervektorraum von
 (bzw. Kn) bildet eine Ebene. Affine zweidimensionalen Unterräume sind parallel verschobene Ebenen, die den Nullpunkt des Raums nicht enthalten.
(bzw. Kn) bildet eine Ebene. Affine zweidimensionalen Unterräume sind parallel verschobene Ebenen, die den Nullpunkt des Raums nicht enthalten.Nicht jedes unter den Begriff der Ebene fallende mathematische Objekt lässt sich als Teilraum eines entsprechenden höherdimensionalen Raumes auffassen. So ist etwa die Moulton-Ebene eine affine Ebene, in der der Satz von Desargues nicht gilt, während er in jedem dreidimensionalen affinen Raum – und damit in jeder enthaltenen Ebene – immer gilt.
Ebenengleichung
Im Falle einer Teilebene höherdimensionale Räume, insb. des
 , lässt sich diese Ebene auf verschiedene Weise beschreiben durch geeignete Gleichungen für den Ortsvektor
, lässt sich diese Ebene auf verschiedene Weise beschreiben durch geeignete Gleichungen für den Ortsvektor  bzw. für die Koordinaten x,y,z (ggf. weitere).
bzw. für die Koordinaten x,y,z (ggf. weitere).Gleichungen im dreidimensionalen Raum
Bekannt ist vor allem die Normalenform (oder implizite Form), die sich eines Normalenvektors
 der Ebene bedient. Weiter wird eine Zahl λ angegeben, um die Position der Ebene zu bestimmen, da der Normalvektor nur die Schräglage der Ebene festlegt; er definiert eine Schar von parallelen Ebenen. λ ergibt sich dabei aus
der Ebene bedient. Weiter wird eine Zahl λ angegeben, um die Position der Ebene zu bestimmen, da der Normalvektor nur die Schräglage der Ebene festlegt; er definiert eine Schar von parallelen Ebenen. λ ergibt sich dabei aus  , wobei
, wobei  einen beliebigen Punkt in der Ebene repräsentiert. Die Vektoren
einen beliebigen Punkt in der Ebene repräsentiert. Die Vektoren  vom Ursprung zu einem Punkt auf der Ebene (Ortsvektoren) erfüllen dann die Gleichung
vom Ursprung zu einem Punkt auf der Ebene (Ortsvektoren) erfüllen dann die Gleichung .
.
Beispiel:
Eine andere gängige Variante ist die Parameterdarstellung, bei der ein Punkt P auf der Ebene gegeben ist und zwei in der Ebene verlaufende linear unabhängige Vektoren
 (Richtungsvektoren oder Spannvektoren).
(Richtungsvektoren oder Spannvektoren).Die Ebene wird definiert durch die Gleichung
 ,
,
- wobei
 .
.
Jedes Wertepaar
 liefert den Ortsvektor eines Punktes der Ebene. Dieser Vektor erfüllt die oben angeführte Normalgleichung.
liefert den Ortsvektor eines Punktes der Ebene. Dieser Vektor erfüllt die oben angeführte Normalgleichung.Die obige Beispielebene sieht in Parameterdarstellung so aus:
Um von der Parameterdarstellung zur Normalenform zu gelangen, bildet man das Kreuzprodukt der beiden Richtungsvektoren und erhält so einen Normalenvektor:
 .
.
Verallgemeinerungen auf höhere Dimensionen
In höherdimensionalen Räumen
funktioniert die Parameterdarstellung weiterhin. Es gibt aber kein Kreuzprodukt mehr, mit dem man hieraus einen (bis auf die Länge) eindeutig bestimmten Normalvektor erhält. Stattdessen muss man ein der Normalform analoges Verfahren anders beschreiben. Man benötigt insgesamt n − 2 linear unabhängige Normalvektoren zu der Ebene und hat dann für jeden hiervon eine Gleichung der Form  ,
,  , welche alle simultan zu erfüllen sind. Dies kann man zusammenfassen zu
, welche alle simultan zu erfüllen sind. Dies kann man zusammenfassen zuwobei A eine
 -Matrix und
-Matrix und  ein Vektor mit n − 2 Komponenten ist. Die Zeilen von A entsprechen den
ein Vektor mit n − 2 Komponenten ist. Die Zeilen von A entsprechen den  , die Komponenten von den bi. Die Bedingung, dass die linear unabhängig sein müssen, entspricht der Bedingung, dass A den Rang n − 2 haben muss.
, die Komponenten von den bi. Die Bedingung, dass die linear unabhängig sein müssen, entspricht der Bedingung, dass A den Rang n − 2 haben muss.Siehe auch
- Affine Ebene
- Hessesche Normalform
- Planarität, das Maß für die Ebenheit
- Spurgerade
- Formelsammlung Analytische Geometrie
Weblinks
- lernzentrum.de Erklärungen zu Geraden, Ebenen, ihrer gegenseitigen Lage, Abständen und Winkeln mit frei drehbaren dreidimensionalen Applets
- Mathewiki: Ebene Darstellungsformen von Ebenen mit Beispielen







Wikimedia Foundation.