- Koordinatentransformation
-
Bei einer Koordinatentransformation werden Koordinaten von einem Koordinatensystem in ein anderes übertragen. Formal gesehen ist dies der Übergang von den ursprünglichen Koordinaten (x1,x2,...,xN) zu den neuen Koordinaten (x'1,x'2,...,x'N). Die häufigsten Anwendungen finden sich in der Geometrie, der Geodäsie, der Bildmessung und bei technischen Aufgabenstellungen.
Typische Transformationsvorgänge sind: Drehung (Rotation), Skalierung (Veränderung des Maßstabs), Scherung und Verschiebung (Translation), die bei komplexeren Transformationen (mehr als etwa 4 Transformationsparameter) auch kombiniert werden.
Die x'i können beliebige Funktionen aller xi sein. In der Regel verwendet man spezielle Transformationen, bei denen diese Funktionen gewissen Einschränkungen – z.B. Differenzierbarkeit, Linearität oder Formtreue – unterliegen. Koordinatentransformationen können angewendet werden, wenn sich ein Problem in einem anderen Koordinatensystem leichter lösen lässt, z. B. bei der Transformation von kartesischen Koordinaten in Kugelkoordinaten oder umgekehrt.
Inhaltsverzeichnis
Lineare Transformationen
Bei linearen Transformationen sind die neuen Koordinaten lineare Funktionen der ursprünglichen, also
- x'1 = a11x1 + a12x2 + ... + a1nxn
- x'2 = a21x1 + a22x2 + ... + a2nxn
- usw.
bzw.
Der Ursprung des neuen Koordinatensystems stimmt dabei mit dem des ursprünglichen Koordinatensystems überein.
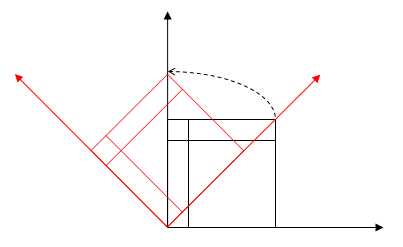
Drehung (Rotation)
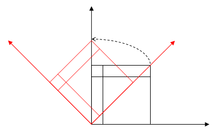 Drehung gegen den Uhrzeigersinn
Drehung gegen den Uhrzeigersinn
Bei einer Drehung wird das Koordinatensystem gedreht. In zwei Dimensionen gibt es nur einen Rotationswinkel als Parameter. Im 3D-Raum kann man um alle drei Koordinatenachsen drehen. Dargestellt wird eine Drehung durch eine Drehmatrix.
Beispiel
Wir betrachten zwei (hier: dreidimensionale) kartesische Koordinatensysteme S und S' mit einer gemeinsamen z-Achse und gemeinsamem Ursprung. S' sei gegenüber S um den Winkel φ um die z-Achse gedreht. Ein Punkt P, der im Koordinatensystem S die Koordinaten
 hat, besitzt dann im Koordinatensystem S' die Koordinaten:
hat, besitzt dann im Koordinatensystem S' die Koordinaten:- x' = xcos φ + ysin φ,
- y' = − xsin φ + ycos φ,
- z' = z.
Somit ergibt sich mit der Drehmatrix für eine Rotation des Koordinatensystems:
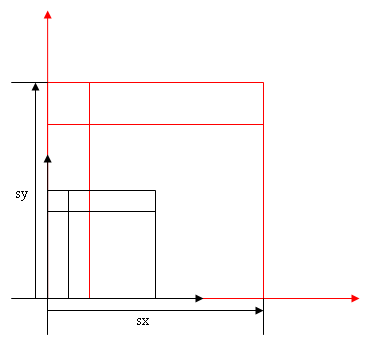
Skalierung
 Skalierung
SkalierungBei der Skalierung werden die „Einheiten“ der Achsen geändert. Das heißt, die Zahlenwerte der Koordinaten xi werden mit konstanten Faktoren λi multipliziert („skaliert“)
Die Parameter dieser Transformation sind die N Zahlen λi. Ein Spezialfall ist die „Maßstabsänderung“, bei der alle Faktoren den gleichen Wert haben
- λi = λ.
Die Skalierung ist ein Spezialfall der linearen Transformation, bei der alle Koordinatenwerte mit dem gleichen Faktor s multipliziert werden. Die Matrix A ist in diesem Fall s mal die Einheitsmatrix.
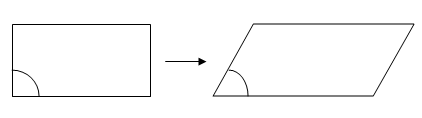
Scherung
 Scherung
ScherungBei der Scherung verändert sich der Winkel zwischen den Koordinatenachsen. Im 2D-Raum gibt es daher einen Parameter und im 3D-Raum drei Parameter.
Affine Transformationen
Affine Transformationen bestehen aus einer oder mehreren einfachen Transformationen.
Sind beide beteiligten Koordinatensysteme linear, (d.h. im Prinzip durch einen Koordinatenursprung und gleichmäßig unterteilte Koordinatenachsen gegeben), so liegt eine affine Transformation vor. Hierbei sind die neuen Koordinaten affine Funktionen der ursprünglichen, also
- x'1 = a11x1 + a12x2 + ... + a1nxn + b1
- x'2 = a21x1 + a22x2 + ... + a2nxn + b2
- usw.
Dies kann man kompakt als Matrixmultiplikation des alten Koordinatenvektors
 mit der Matrix A, die die Koeffizienten aij enthält, und Addition eines Vektors
mit der Matrix A, die die Koeffizienten aij enthält, und Addition eines Vektors  , der die bi enthält, darstellen
, der die bi enthält, darstellenDie Translation ist ein Spezialfall einer affinen Transformation, bei der A die Einheitsmatrix ist.
Verschiebung (Translation)
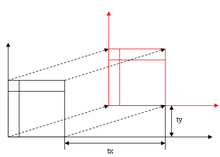 Verschiebung
VerschiebungEine Translation kann entweder als Verschiebung des Koordinatenursprungs oder (leichter vorstellbar) als Verschiebung der abgebildeten Objekte gedeutet werden. Im 2D-Raum erfordert eine Translation zwei Parameter: Verschiebung in x-Richtung (tx) und in y-Richtung (ty), analog dazu gibt es in 3D als dritten Parameter die Verschiebung in z-Richtung (tz).
Beispiel
Wir betrachten zwei Koordinatensysteme S und S'. S' ist gegenüber S um den Vektor
 verschoben. Ein Punkt P, der im Koordinatensystem S die Koordinaten
verschoben. Ein Punkt P, der im Koordinatensystem S die Koordinaten  hat, besitzt dann im Koordinatensystem S' die Koordinaten
hat, besitzt dann im Koordinatensystem S' die Koordinaten  .
.Beispiele
Kartesische Koordinaten und Polarkoordinaten
Ein Punkt in der Ebene wird im kartesischen Koordinatensystem durch seine Koordinaten (x,y) und im Polarkoordinatensystem durch den Abstand r vom Ursprung und dem (positivem) Winkel φ zur x-Achse bestimmt.
Dabei gilt für die Umrechnung von Polarkoordinaten in kartesische Koordinaten:
Für die Umrechnung von kartesischen Koordinaten in Polarkoordinaten gilt:
Weitere Anwendungen
In der Physik sind die Galilei-Transformation und die Lorentz-Transformation wichtig. Häufig gebraucht werden auch Transformationen von Operatoren und Vektoren.
In den Geowissenschaften - insbesondere der Geodäsie und Kartografie gibt es noch weitere Transformationen, die formal Koordinatentransformationen darstellen.
- Transformation von geographischer Breite und Länge in Gauß-Krüger-Koordinaten
- Die Umrechnungen zwischen astronomischen Koordinaten
- 7-Parameter-Transformation (Verschiebung, Drehung, Maßstab zwischen zwei Koordinatensystemen auf demselben oder anderen Referenzellipsoid(en), auch Helmert-Transformation ("Dreh-Streckung")).
Im Bereich Robotik gilt die Denavit-Hartenberg-Transformation als das Standardverfahren.
Literatur
- I. N. Bronstein, K. A. Semendjajew, G. Musiol: Taschenbuch der Mathematik. 6. vollständig überarbeitete und ergänzte Auflage. Verlag Harry Deutsch, Frankfurt am Main 2005, ISBN 3-8171-2006-0.
- Siegfried Heitz: Koordinaten auf geodätischen Bezugsflächen. Dümmler, Bonn 1985, ISBN 3-427-78981-0.
- Siegfried Heitz: Mechanik fester Körper. Band 1: Grundlagen. Dynamik starrer Körper. Dümmler, Bonn 1980, ISBN 3-427-78921-7.
Weblinks
- Transformation von Koordinaten und Höhen in der Landesvermessung (PDF-Datei; 939 kB)
- Freies Programm für ebene und räumliche Transformationen
- WTRANS Software zur Berechnung der Parameter für 2D/3D-Koordinatentransformationen für kartesische Koordinaten und geographische Koordinaten (Molodenski-Ansatz), Projektionen, Geodätische Hauptaufgaben









Wikimedia Foundation.