- Fahrmotoren
-
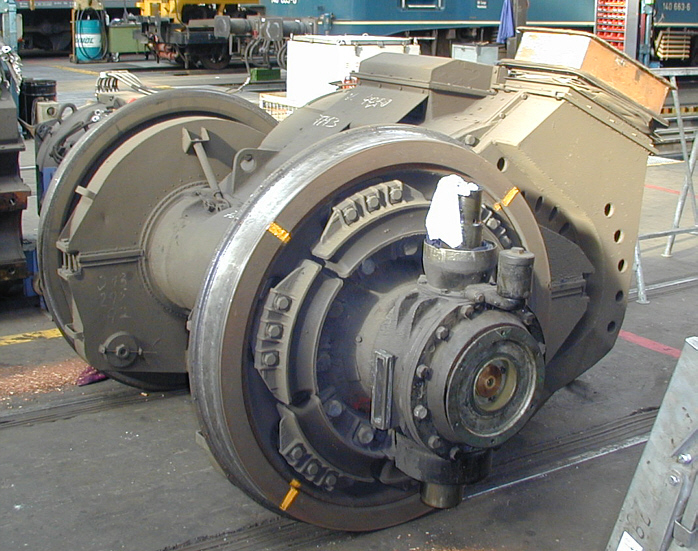
 Treibradsatz mit Fahrmotor. An der Außenseite sind die Gummisegmentfedern zu erkennen, die den Radkörper elastisch mit dem Motorgetriebe verbinden. Der Schachtstutzen rechts oben dient zur Kühlluftzufuhr.
Treibradsatz mit Fahrmotor. An der Außenseite sind die Gummisegmentfedern zu erkennen, die den Radkörper elastisch mit dem Motorgetriebe verbinden. Der Schachtstutzen rechts oben dient zur Kühlluftzufuhr.Als Fahrmotoren werden die Motoren bezeichnet, mit denen ein Radsatz eines Triebfahrzeugs unmittelbar angetrieben wird. Dies betrifft vor allem den Elektromotor für den Antrieb von Bahnfahrzeugen bzw. von Lokomotiven und Triebwagen.
Inhaltsverzeichnis
Bauformen-Unterscheidungen
Bei anfänglich niedrigen Geschwindigkeiten und einfachen Ansprüchen lagen wesentliche Unterschiede bei den Fahrmotoren zunächst in der elektrischen Betriebsart. Hierin lassen sich Unterscheidungen nach dem verwendeten Speisestromsystem machen, wobei insbesondere nach Gleichstrom-, Einphasenwechselstrom mit 16 2/3 oder 50 Hz und Drehstrom bzw. Dreiphasenwechselstrom differenziert werden kann.
Diese Unterscheidungen werden für moderne Bahnen selten angewendet, da vielfach flächendeckend ein einheitliches Stromsystem besteht, für das alle Motoren der jeweiligen Bahn ohnehin ausgelegt sein müssen. Prägnanter sind daher innerhalb eines Bahnsystems oder an einem speziellen Fahrzeug die mechanischen Unterschiede nach der Art der Motoraufhängung zwischen Lokomotivkasten und Radsatz einerseits sowie nach der Art der Kraftübertragung vom Motor auf das Rad (siehe unten).
Unterscheidung nach dem Stromsystem
Gleichstrommotor
Der Gleichstrom-Reihenschlussmotor hat ein hohes Anlauf-Drehmoment und ist damit hervorragend für den Antrieb von Fahrzeugen geeignet. Die vergleichsweise niedrigen nötigen Rad-Drehzahlen begünstigen zudem den Einsatz hinsichtlich von Kommutierungsproblemen, die bei höheren Drehzahlen verstärkt auftreten. Mit Gleichstrommotoren wird meist ein „Direktantrieb“ mit der aus der Oberleitung abgenommenen Spannung durchgeführt, eventuell unter Zwischenschaltung von Steuerelementen. Unproblematisch zeigte sich dies bei Straßenbahnen und U-Bahnen, die bei der begrenzten Streckenlänge gut mit wenigen Hundert Volt Spannung betrieben werden konnten. Bei Fernbahnen war für die Übertragung einerseits eine hohe Spannung günstig, andererseits jedoch ungünstig für den Motorenbau. Die verwendeten Stromsysteme pendelten sich hier bei 1.500 und 3.000 Volt ein. Bei 3.000 Volt wurden meist je zwei Motoren hintereinandergeschaltet, um die Spannung je Motor zu halbieren. Dennoch zeigte sich die Gleichstrom-Übertragung über große Entfernungen als wirtschaftlich aufwendig.
Wechselstrommotor
Ebenso wie der Gleichstrom-Reihenschlussmotor hat der Einphasenwechselstrom-Reihenschlussmotor ein hohes Anzugsmoment. Die Anwendung des für Bahnbetriebe speziell entwickelten Wechselstrommotors lässt es zu, den finanziellen Aufwand für die Stromübertragung durch Überleitung von hohen Spannungen zu vermindern. Dies jedoch unter der Bedingung, dass auf der Lokomotive (im Unterschied zum Gleichstrom-„Direktantrieb“) ein entsprechend großer Transformator und Hochspannungs-Stufenschalter mitgeführt wurden, um die letztlich 15.000 bis 25.000 Volt betragende Spannungen und Ströme auf motor-verträgliche Größen herunterzuspannen.
Als problematisch zeigte sich zunächst, die verbreitete Industriefrequenz von 50 Hz zu verwenden. Bei den großem Motoren wurden durch diese Frequenz in den jeweils momentan in der „neutralen Zone“ befindlichen Wicklungsspulen unerwünscht hohe Induktionsspannungen erzeugt, die zu starker Funkenbildung und Verschleiß an den Kommutatoren und Übertragungs-Bürsten führten. Versuche zeigten, dass sich das Problem bei niedrigen Frequenzen besser beherrschen ließ. Dies führte um 1912 zu einer Einigung der deutschsprachigen Länder auf eine Wechselstrom-Fahrleitungsspannung von 15.000 Volt bei einer Frequenz von einem Drittel des 50 Hz-Maßes, also von 16 2/3 Hz. Später übernahmen auch andere Länder wie Schweden und Norwegen dieses durchaus erfolgreiche Betriebssystem. Dennoch konnten sich daneben auch weltweit Systeme mit höheren Spannungen und Frequenzen angewendet werden, so vor allem das 25 kV / 50 Hz-System.
Beim Stand seit dem Jahr 1990 verlieren die Einphasenwechselstrommotoren an Bedeutung, da nunmehr durch moderne Stromrichter und Steuerungstechnik doch wieder die betrieblich günstigeren Drehstrommotoren zum Einsatz kommen können.
Drehstrommotor
Der Drehstrom-Asynchronmotor bietet durch seinen sehr einfachen Aufbau, bei dem vor allem eine Stromübertragung auf den rotierenden Anker entfällt, einige Vorteile. Deshalb wurden die ersten Wechselstrom-Bahnantriebe mit Drehstrommotoren durchgeführt. Nachteilig waren hierbei zwei wesentliche Punkte: zum Einen lässt sich der Drehstrommotor nur mit bestimmten Drehzahlen betreiben, die durch die Frequenz des Drehstroms und der Polzahl der Motorwicklung bestimmt werden. Umschaltbare Motoren lassen lediglich eine grobe Geschwindigkeitssteuerung in maximal sechs Stufen zu. Der andere Punkt ist die aufwendige Fahrleitung die entweder dreipolig oder zweipolig (bei Hinzunahme der Schienen als drittem Pol) ausgeführt werden muss. Technisch und betrieblich ist dabei vor allem die Leitungsführung über Weichen und Kreuzungen kompliziert.
Dennoch wurde das Drehstromsystem beispielsweise bei der Italienischen Staatsbahn von 1904 bis 1976 in großem Umfang verwendet. Seit den 1990er Jahren kann jedoch mit modernen Stromrichtern und Steuerungstechnik auf dem Triebfahrzeug selbst Drehstrom zum Motorantrieb mit beliebiger Frequenz aus dem Gleich- oder Einphasenwechselstrom der Fahrleitung generiert werden. Das ermöglicht jetzt die Anwendung von einfachen, robusten und leistungsfähigen Drehstrommotoren mit stufenloser Drehzahlregelung.
Unterscheidung nach der Lagerungsart
Unterscheidung nach der Kraftübertragung
- Westinghouse-Federantrieb
- Buchli-Antrieb
- Federtopfantrieb
- Gummiringsegmentantrieb
- Kardan-Gummiringfederantrieb
- Kegelringfeder-Antrieb
Mechanische Aufbauvarianten
Die beim Betrieb des Fahrmotors entstehende Verlustwärme muss abgeführt werden. Dies erfolgt entweder mit direkt auf der Motorwelle aufgesteckten Lüfterräder (eigenbelüftet) oder mit speziellen Fahrmotorlüftern, die außerhalb des Fahrmotors angeordnet sind und einen eigenen Antrieb haben. Eigenbelüftete Motoren kommen in leichten Triebwagen zum Einsatz, fremdbelüftete Motoren werden in Lokomotiven und anderen Fahrzeugen mit hohen Antriebsleistungen eingesetzt.
Der Fahrmotor bildet zusammen mit der Kraftübertragung auf den Radsatz den Antrieb. Daraus ergeben sich verschiedene Bauformen der Fahrmotoren:
- Achsmotor - Der Motor ist vollständig auf der Radsatzwelle angeordnet - früher in den USA verwendet
- Schwebemotor - Der Rotor ist auf der Achswelle angeordnet, der Stator ist im gefederten Fahrwerk untergebracht - früher in den USA verwendet
- Tatzlagermotor - Fahrmotor stützt sich teilweise auf die Achse ab, hohe Rad/Schiene-Kräfte
- Gestellmotor - Fahrmotor ist vollständig im gefederten Fahrwerk untergebracht und überträgt die Kraft mit Stangen, Hohlwellen oder Kardanwellen auf den Radsatz / die Radsätze.
Früher wurden auch Fahrmotoren verwendet, bei denen zwei Elektromotoren im selben Gehäuse untergebracht waren:
- Zwillingsmotor - die Wellen der beiden Rotoren liegen nebeneinander
- Tandemmotor - die beiden Rotoren liegen auf einer gemeinsamen Welle, angewendet bei italienischen Gleichstromlokomotiven und für 50Hz-Einphasenreihenschlussmotoren.
Die Fahrmotoren können auch nach der Einbaulage im Fahrzeug unterschieden werden:
- Quermotor - die häufigste Anordnung in Lokomotiven und Triebwagen
- Längsmotor - bei Straßenbahntriebwagen und Hochgeschwindigkeitszügen
- Vertikalmotor - bei einigen Lokomotiven angewendet
Die meisten E-Loks verfügen über Rekuperationsbremsen (Elektrobremse), wobei die Motoren dann als Generator funktionieren, ähnlich wie bei einem Hybridauto und somit eine zusätzliche Bremswirkung zur Verfügung stellen. Die dabei erzeugte elektrische Leistung kann bei modernen E-Loks wieder in die Oberleitung zurückgespeist werden oder wird bei älteren E-Loks über Bremswiderstände in Wärme umgewandelt und über Luftaustritte am Dach der Lok an die Umgebung abgegeben.
Siehe auch Repulsionsmotor
Wikimedia Foundation.