- Gleichstrommaschine
-
Eine Gleichstrommaschine, auch Gleichstrommotor, Kommutatormotor oder Kommutatormaschine, ist eine rotierende elektrische Maschine, die mit Gleichstrom betrieben wird oder Gleichstrom erzeugt. Je nach Richtung des Leistungflusses wird zwischen dem Gleichstrommotor (ein Elektromotor, dem elektrische Energie zugeführt und mechanische Energie entnommen wird)) und dem Gleichstromgenerator (ein elektrischer Generator) unterschieden. Gleichstrommaschinen haben gute Anlaufverhalten und eine gute Regelbarkeit.
Merkmal der klassischen Gleichstrommaschinen ist ein mechanischer Wechselrichter, welcher als Kommutator (Polwender) bezeichnet wird und auf der Achse der rotierenden Maschine angebracht ist. Er dient im Motorbetrieb als Polwender und erzeugt im Rotor einen drehzahlabhängigen Wechselstrom. Im Generatorbetrieb richtet er die vom Rotor gelieferte Wechselspannung gleich und erzeugt eine pulsierende Gleichspannung. In einigen Anwendungsfällen kann die Gleichstrommaschine als Motor oder als Generator betrieben werden.
Eine Sonderform der Gleichstrommaschine ohne Kommutator stellt die Unipolarmaschine dar.
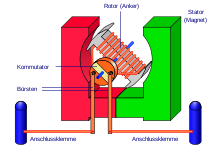
 Schnittdarstellung durch eine permanent erregte Gleichstrommaschine
Schnittdarstellung durch eine permanent erregte Gleichstrommaschine
Inhaltsverzeichnis
Geschichte
 Historische Gleichstrommaschine
Historische GleichstrommaschineBegünstigt durch die Entwicklung der ersten galvanischen Elemente in der ersten Hälfte des 19. Jahrhunderts, waren die ersten elektromechanischen Energiewandler Gleichstrommaschinen. Im Jahr 1832 baute der Franzose Hippolyte Pixii den ersten Gleichstromgenerator. Antonio Pacinotti baute um 1860 einen Gleichstrommotor mit vielteiligem Kommutator. Friedrich von Hefner-Alteneck entwickelte 1872 den Trommelanker, welcher mit den Arbeiten von Werner von Siemens zu dem dynamoelektrischen Prinzip die Möglichkeit der Selbsterregung und den industriellen Einsatz im Bereich des Großmaschinenbaus eröffnete.[1]
In den folgenden Jahrzehnten verlor die Gleichstrommaschine, bedingt durch die Entwicklung des Dreiphasenwechselstroms, im Großmaschinenbau an Bedeutung. Insbesondere die Synchronmaschinen und für wartungsarme Antriebssysteme der Asynchronmotor lösten die Gleichstrommaschine in vielen Anwendungsbereichen ab. Durch die gute Regelbarkeit der Gleichstrommaschine, dies ist durch die getrennte Steuerung des Stromes sowohl durch die Ankerwicklung als auch durch die Rotorwicklung bedingt, hat die Gleichstrommaschine insbesondere im Bereich hochdynamischer Antriebssysteme eine gewisse Bedeutung behalten. Dazu zählen beispielsweise Antriebsmotoren in Werkzeugmaschinen mit präziser Drehzahl- und Drehmomentensteuerung. Im Kleinstleistungsbereich, wie beispielsweise bei Modellbahnen, ist vor allem der permanent erregte Gleichstrommotor des einfachen Aufbaues wegen üblich.
Aufbau
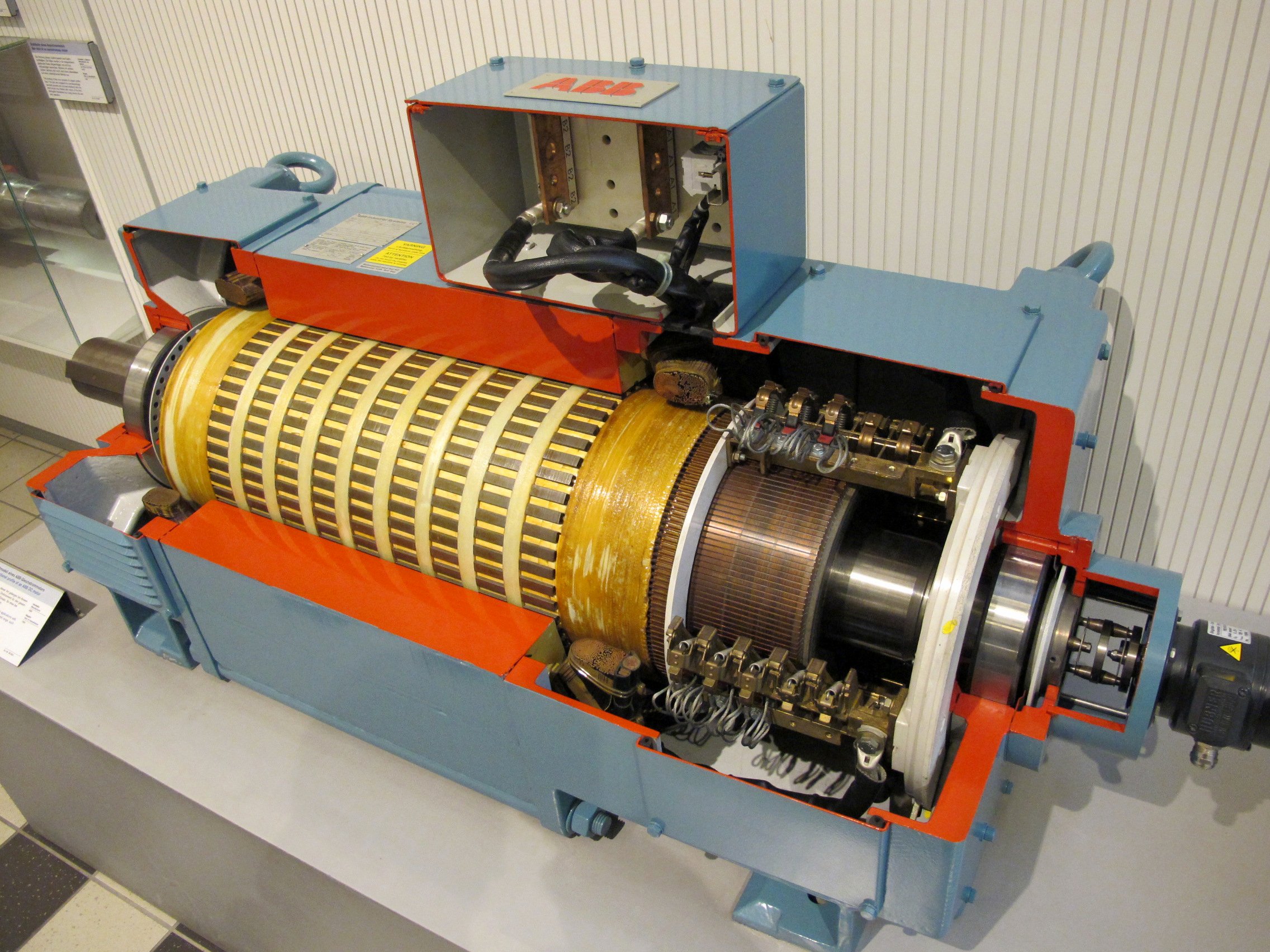
 Schnittmodell durch einen industriellen Gleichstrommotor
Schnittmodell durch einen industriellen GleichstrommotorDie Maschine besitzt einen unbeweglichen Teil, den Stator. Er besteht aus einem Joch in Form eines Hohlzylinders. Daran befestigt sind ausgeprägte Pole. Die Hauptpole und bei größeren Maschinen auch Wendepole. Der Stator ist nicht geblecht, sondern besteht aus massiven Material, da hier kein magnetisches Wechselfeld wirkt und somit keine Wirbelströme auftreten. Der Hauptpolkern trägt die Hauptpol- oder auch Erregerwicklung, es sei denn, die Maschine ist permanentmagneterregt. Bei diesen erzeugen Permanentmagnete den nötigen Hauptpolfluss. In den Polschuhen sitzt bei größeren Maschinen die Kompensationswicklung. Außerdem gibt es einen drehbar gelagerten Teil, den Rotor, welcher bei konventionellen Maschinen auch als Anker bezeichnet wird. Der Rotor ist geblecht ausgeführt, da hier sonst durch die auftretenden Ummagnetisierungen große Wirbelstromverluste auftreten würden. Die meisten Gleichstrommaschinen sind als Innenläufer ausgeführt: der Rotor ist der innere Teil, der Stator der äußere. Bei dem Außenläufer ist es umgekehrt. Bei kleineren Maschinen kann der Stator aus Permanentmagneten bestehen, diese werden als permanent erregte Gleichstrommaschine bezeichnet.
Eine oder mehrere Spulen auf dem Anker werden in einem magnetischen Feld (Stator) so platziert, dass durch die Lorentzkraft ein Drehmoment erzeugt wird. Die Wicklungen des Ankers werden hierzu über einen Kommutator (Polwender) angeschlossen. Die Schleifkontakte am Kommutator (Bürsten oder Kohlebürsten) sind so angeordnet, dass sie während der Drehung die Polung der Ankerwicklungen so wechseln, dass immer diejenigen Wicklungen von Strom entsprechender Richtung durchflossen werden, die sich quer zum Erregerfeld bewegen.
Die Bürsten sind aus einem Material gefertigt, welches eine verschleißarme gute Kontaktierung bietet (oft selbstschmierender Graphit, teilweise gemischt mit Kupferpulver; bei kleinen Motoren für Kassettentonbandgeräte kommen auch Edelmetall-Bürsten zum Einsatz, siehe Kohlebürste).
Durch Umkehrung des Prinzips (Anker wird bewegt) erhält man einen Generator. Zur Nutzung als Generator zur Stromerzeugung werden nur permanent- oder fremderregte Bauweisen benutzt. Der Kommutator ermöglicht die Wandlung des erzeugten Wechselstroms in Gleichstrom.
Das allgemeine Motorverhalten wird durch die Feldstärke der Feldwicklung und die Eigenschaften der Ankerwicklung (Windungszahl, Anzahl der Pole) bestimmt.
Permanenterregte Gleichstrommaschine
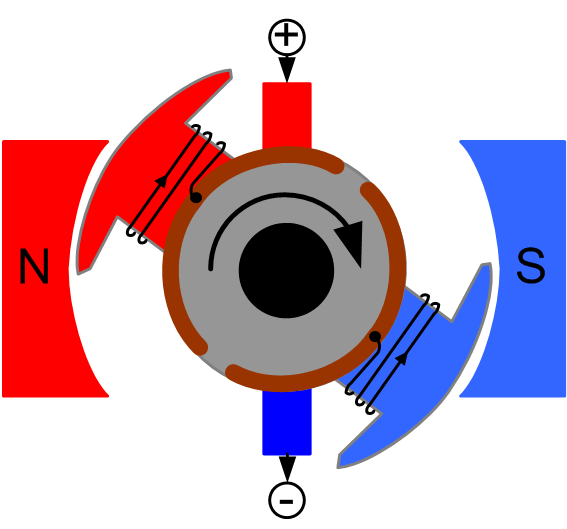
 Schematische Darstellung der Arbeitsweise einer permanenterregten Gleichstrommaschine
Schematische Darstellung der Arbeitsweise einer permanenterregten GleichstrommaschineDas Stator-Magnetfeld wird bei kleineren Motoren (Spielzeug, Stellantriebe, Gebläse und Kühler-Ventilatoren in Kraftfahrzeugen) oft durch Permanentmagnete erzeugt. Diese Magnete sind mit der Entwicklung der Gleichstrommotoren immer leistungsfähiger geworden und gestatten heute den Bau von Motoren, die in ihrer Leistung denen mit elektrischer Erregung in Nichts nachstehen. Die Kosten der Permanentmagnete sind jedoch bei größeren Motoren oft höher als diejenigen einer Erregerwicklung.
Permanenterregte Motoren haben, wie auch fremderregte Maschinen, sehr hohe Einschaltströme. Ihr Betriebsverhalten ist in den mathematischen Grundlagen erklärt. Permanenterregte Maschinen haben den Vorteil, dass zur Erzeugung des Magnetfeldes keine Energie benötigt wird. Das verbessert besonders bei kleiner Gesamtleistung den Wirkungsgrad. Der Nachteil besteht darin, dass Feldschwächung unmöglich und damit der mögliche Drehzahlbereich kleiner ist.
Elektrisch erregte Gleichstrommaschine
Wird das Statorfeld durch einen Elektromagneten erzeugt, spricht man von elektrischer Erregung. Ist die Erregerwicklung vom Ankerstromkreis unabhängig, spricht man von Fremderregung. Sind die Rotor- und Statorwicklung miteinander verbunden, unterscheidet man:
Reihenschlussmaschine
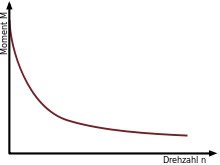 Kennlinie einer Reihenschlussmaschine
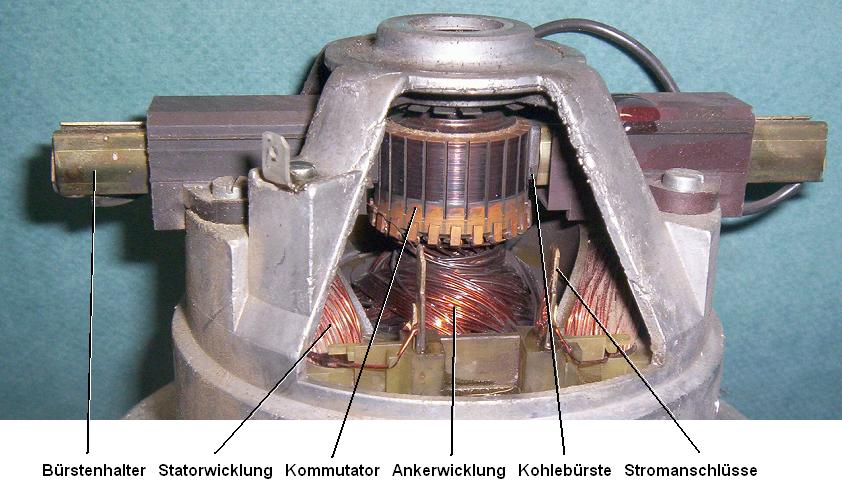
Kennlinie einer Reihenschlussmaschine Reihenschlussmotor (Antrieb der Radialturbine eines Staubsaugers)
Reihenschlussmotor (Antrieb der Radialturbine eines Staubsaugers) Funktionsprinzip Reihenschlussmotor
Funktionsprinzip Reihenschlussmotor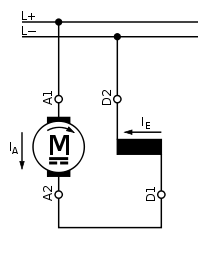 Reihenschlussmotor (interne Verschaltung)
Reihenschlussmotor (interne Verschaltung)Der Reihenschlussmotor wird auch Hauptschlussmaschine genannt, bei ihm sind Erregerwicklung und Ankerwicklung in Reihe geschaltet. Die Erregerwicklung muss daher im Gegensatz zum Nebenschlussmotor niederohmig sein. Bei einer Speisung mit Wechselspannung wechseln sowohl Erregerfeld als auch der Ankerstrom ihre Richtung nach jeder Halbwelle, so dass der Motor auch an Wechselspannung verwendbar ist. Der Eisenkern des Stators muss hierzu jedoch, um Wirbelströme zu vermeiden, aus einem Blechpaket bestehen.
Einphasen-Reihenschlussmotoren wurden früher in Elektrolokomotiven (daher der Frequenzkompromiss 16,7 Hz im Bahnstromnetz) und auch heute noch in Straßenbahntriebwagen verwendet. Unter dem Begriff Universalmotor oder Allstrommotor treiben sie viele Haushaltsmaschinen, wie Staubsauger, Küchenmaschinen, Bohrmaschinen und andere Elektro-Handgeräte, an. Auch die Anlasser von Verbrennungsmotoren sind Reihenschlussmotoren.
Um einen Reihenschlussmotor als Generator (z. B. beim elektrischen Bremsen von Straßenbahnen) betreiben zu können, muss seine Erregerwicklung umgepolt werden, ansonsten hebt der generierte, durch die Feldwicklung fließende Strom das Erregerfeld auf.
Das Drehmoment einer Reihenschlussmaschine ist stark drehzahlabhängig (Reihenschlussverhalten). Bei geringer Drehzahl ist auch die Gegeninduktionsspannung der Ankerwicklung gering. Daher fließt ein sehr großer Strom durch den Anker und damit wegen der Reihenschaltung auch durch die Erregerwicklung. Als Folge kann von der Maschine im Stillstand und bei geringer Drehzahl ein sehr großes Drehmoment aufgebracht werden. Da die Gegeninduktionsspannung im Stromkreis mit der Drehzahl ansteigt, sinkt der Strom durch diesen. Das Erregerfeld wird dadurch im Vergleich zum Stillstand geschwächt und damit auch das Drehmoment der Maschine.
Reihenschlussmotoren haben, insbesondere bei Wechselspannungsbetrieb („Universalmotor“, z. B. in Staubsaugern), einen wesentlich geringeren Einschaltstrom, als Nebenschluss- oder permanenterregte Motoren. Sie liefern dabei jedoch kurzzeitig ein hohes Anlaufmoment. Deswegen werden sie in Anlassern, Straßenbahnfahrzeugen und Elektrolokomotiven verwendet, wo sie im Kurzbetrieb extrem überlastbar sind.
Bei Betrieb mit Wechselstrom gibt das Netz eine pulsierende (doppelte Netzfrequenz) Leistung ab. Daher ist auch das Drehmoment pulsierend, so dass bei großen Motoren elastische Elemente zwischengeschaltet werden müssen. Das gilt auch für Einphasen-Synchronmaschinen.
Die Anschlüsse des Ankers werden mit A1 und A2 bezeichnet, die der Erregerwicklung mit D1 und D2. In der dargestellten Beschaltung dreht der Motor rechts herum (im Uhrzeigersinn), erkennbar am eingezeichneten Pfeil im Anker.
Nebenschlussmaschine
 Kennlinie einer Nebenschlussmaschine
Kennlinie einer Nebenschlussmaschine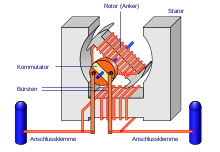 Nebenschlussmaschine
Nebenschlussmaschine Nebenschlussmotor (interne Verschaltung)
Nebenschlussmotor (interne Verschaltung)Bei der Nebenschlussmaschine sind Erreger- und Ankerwicklung parallelgeschaltet. Ein Wechselspannungsbetrieb ist schlecht möglich, da Erreger- und Ankerstrom aufgrund des hohen Blindanteiles des Stromes durch die Erregerwicklung (große Induktivität) eine unterschiedliche Phasenlage besitzen. Die Drehzahl großer Nebenschlussmaschinen ist nahezu drehmomentunabhängig und proportional mit der Versorgungsspannung einstellbar, wodurch sie sich besonders für drehzahlvariable Antriebe von Walzwerken und anderen Arbeitsmaschinen mit konstantem Gegenmoment, z.B. Förderbänder und Hebezeuge eignen. In alle diese Bereiche ist aber inzwischen auch die Asynchronmaschine vorgedrungen.
Nebenschlussmotoren können bei Unterbrechung des Erregerkreises durchgehen, da beim Zusammenbrechen des Erregerfeldes die Drehzahl und Stromaufnahme bei gleicher Versorgungsspannung drastisch ansteigt.
Nebenschlussmotoren können als Generator (z. B. zur Bremsung) arbeiten, wenn eine Hilfsspannungsquelle oder eine Restmagnetisierung dafür sorgen, dass beim Start des Bremsvorganges eine Erregung vorhanden ist. Mit steigender Erregung oder Drehzahl steigt auch die generierte Spannung – es ist die Spannung, die auch bei Motorbetrieb dem speisenden Strom entgegen wirkt und für eine konstante Drehzahl sorgt. Sie wird daher auch Gegen-EMK genannt.
Die Anschlüsse des Ankers werden mit A1 und A2 bezeichnet, die der Erregerwicklung mit E1 und E2. In der dargestellten Beschaltung dreht der Motor rechts herum (im Uhrzeigersinn), erkennbar am eingezeichneten Pfeil im Anker.
Das maximal erreichbare Drehmoment wird durch den zulässigen Ankerstrom begrenzt, dieser ist hauptsächlich von den getroffenen Kühlmaßnahmen abhängig. Große Nebenschlussmaschinen in Walzwerken werden fremdbelüftet, um auch bei geringer Drehzahl einen hohen Ankerstrom, und damit ein hohes Drehmoment zu ermöglichen.Wird eine Nebenschlussmaschine plötzlich an ihre Nennbetriebsspannung gelegt fließt durch den Anker ein sehr hoher Einschaltstrom, der die Schutzorgane auslösen kann. Große Maschinen müssen daher mit geringerer Spannung angefahren werden. Dadurch wird die Kennlinie parallel zu geringen Drehzahlen hin verschoben, so dass sie die Momentenachse in einem Bereich außerhalb der Überlast schneidet. Das Anlaufmoment sowie der Ankerstrom im Stillstand sind dann begrenzt. Zusammen mit der folgenden Erhöhung der Antriebsdrehzahl kann auch die Spannung erhöht werden. Alternativ können zum Anfahren Vorwiderstände im Ankerkreis verwendet werden, dadurch wird die Kennlinie flacher, so dass sie wiederum die Achse in einem Bereich außerhalb der Überlast schneidet. Der Nachteil dieser Methode ist die Verlustleistung am Widerstand, dieser muss dann ebenfalls aktiv gekühlt werden.
Verbundmaschine
Der Doppelschlussmotor (auch Verbund- oder Compound-Motor genannt) vereinigt die Eigenschaften des Neben- und des Reihenschlussmotors in einer Maschine. Er hat eine Reihenschluss- und eine Nebenschlusswicklung. Je nach Auslegung hat der Doppelschlussmotor unterschiedliches Betriebsverhalten. Bei richtiger Compoundierung hat er ein etwas geringeres Anzugsdrehmoment als ein gleichwertiger Reihenschlussmotor. Seine Drehzahl sinkt dann bei Belastung etwas mehr ab als die eines entsprechenden Nebenschlussmotors. Bei Leerlauf geht er nicht durch. Wird der Doppelschlussmotor überkompoundiert, so hat er vorwiegend Reihenschlussverhalten, also ein hohes Anzugsmoment, aber eine instabile Drehzahl. Bei Unterkompoundierung hat er überwiegend Nebenschlussverhalten, also hohe Drehzahlstabilität, aber geringeres Anzugsmoment. Der Doppelschlussmotor wird wegen seines gleichen Drehzahl-Drehmoment-Verhaltens zum Antrieb z. B. von Pressen und Stanzen verwendet.
Fremderregte Maschinen
Hier werden Anker- und Erregerwicklung aus unterschiedlichen Spannungsquellen gespeist. Während bei der Nebenschlussmaschine die Erregerspannung gleich der Ankerspannung ist, kann man bei fremderregten Maschinen durch Verringerung des Erregerstroms (Feldschwächung) die Drehzahl erhöhen oder durch Verringerung der Ankerspannung absenken. Drehmomentschwankungen ergeben geringe Drehzahländerungen.
Fremderregte Maschinen wurden früher z. B. im Leonardsatz eingesetzt, dem früher einzigen drehzahlvariablen Antrieb für große Leistungen, der aus einem Drehstrom-Asynchronmotor, einem jeweils fremderregten Gleichstrom-Generator und Gleichstrom-Motor bestand. Weitere Anwendungen sind bzw. waren Pendelmaschinen in Motorprüfständen und Antriebe von Werkzeugmaschinen und Scheibenwischern. Auch als Fahrmotoren in den elektrischen Stadtschnellbahntriebzügen der DB-Baureihe 420 werden fremderregte Motoren verwendet, da hier in Verbindung mit einer Phasenanschnittsteuerung deren Vorteile voll ausgespielt werden können.
Spezielle Bauformen
Glockenanker-Maschinen
 Rotor einer Glockenanker-Maschine der Firma maxon motor ag mit umfangparalleler Fadenwicklung und grauer Auswuchttränkung seitlich
Rotor einer Glockenanker-Maschine der Firma maxon motor ag mit umfangparalleler Fadenwicklung und grauer Auswuchttränkung seitlich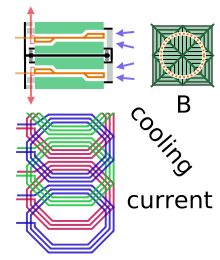 Schema eines Glockenanker-Motors, oben: Längs- und Querschnitt, unten: Anordnung der Spulenstränge auf der Zylinderfläche; B = Magnetfluss, current = Stromfluss
Schema eines Glockenanker-Motors, oben: Längs- und Querschnitt, unten: Anordnung der Spulenstränge auf der Zylinderfläche; B = Magnetfluss, current = StromflussKleine Maschinen bis etwa 100 Watt mit Permanentmagneten können auch mit einem hohlen Rotor gebaut werden. Der Rotor ist eisenlos, selbsttragend gewickelt und kunstharzgetränkt.
Der Stator, ein Permanentmagnet, liegt in diesem Fall innerhalb des Rotors. Das außenliegende Motorgehäuse aus Eisen bildet den notwendigen Rückschluss für den magnetischen Fluss des Stators. Der elektrische Aufbau entspricht der ersten Illustration.
Durch den eisenlosen Aufbau des Rotors bildet der Motor kein Rastmoment aus, er lässt sich vollkommen frei drehen.
Da im Gegensatz zu allen anderen Motoren im Betrieb keine Eisenteile ummagnetisiert werden müssen, ist dieser Motor frei von Eisenverlusten und erreicht bei hohen Drehzahlen höhere Wirkungsgrade. Insbesondere ist jedoch sein Rotations-Trägheitsmoment geringer, weshalb damit hochdynamische, leichte Antriebe realisiert werden können. Die Egger-Modellbahn (2003) fährt damit ruckfrei und langsam.
Nachteilig ist der große Luftspalt im Erregerkreis, der eine verringerte Magnetflussdichte zur Folge hat. Die selbsttragende Bauweise stellt hohe technologische Anforderungen, da die Fliehkräfte aufgenommen werden müssen und ein nachträgliches Auswuchten des Ankers durch Materialabtrag nicht möglich ist. Nötige Stoßfestigkeit limitiert die Ankergröße.Der Scheibenläufermotor ist ähnlich aufgebaut, allerdings ist die Läufer-Wicklung nicht in Form eines Zylinders, sondern als Scheibe ausgeführt.
Bürstenlose Gleichstrom-Maschinen
Nachteil der Gleichstrommaschinen sind Funken, die bei den Bürsten entstehen („Bürstenfeuer“). Das Bürstenfeuer ist die Hauptursache für hochfrequente Störungen, die der Motor im Betrieb in das Leitungsnetz zurückspeist und die andere elektrische Verbraucher stören. Es begrenzt auch die maximale Drehgeschwindigkeit, da die Bürsten bei hohen Drehzahlen heiß werden und besonders schnell verschleißen. Weiterhin bewirken hohe Drehzahlen auch höhere Induktionsspannungen, die bis hin zum umlaufenden Bürstenfeuer führen können.
Mit der Entwicklung der Elektronik können kleinere permanenterregte Synchronmotoren so betrieben werden, dass sie von außen ähnlich beschrieben werden können wie eine Gleichstrommaschine. Diese Motoren mit Elektronik-Umrichter wurden besonders im englischen Sprachraum als brushless direct current (BLDC) beworben, auf Deutsch übersetzt bürstenlose Gleichstrommaschine. Die Maschine wird auch als EC-Motor (EC für electronically commutated) bezeichnet. Vom Aufbau her sind diese Motoren ungedämpften permanenterregten Synchronmaschinen gleich und können in Anwendungen, die eine genügende Eigendämpfung haben auch als Synchronmaschine angesteuert werden.[2]
Spezielle Effekte
Ankerrückwirkung
Da der Anker stromdurchflossen ist, bildet sich auch um diesen ein magnetisches Feld. Dieses verstärkt das Hauptfeld auf der einen Seite des Leiters und schwächt es auf der anderen. Insgesamt führt dies dazu, dass sich der neutrale Bereich, in dem die Polung des Stromes umgeschaltet werden muss, etwas verspätet, d. h. im Generatorbetrieb in Drehrichtung und im Motorbetrieb gegen die Drehrichtung verschiebt. Da sich jedoch der Kommutator nicht anpasst (also stets senkrecht zu den Polschuhen umschaltet und nicht senkrecht zu den „effektiven“ Feldlinien), liegt zu dem Zeitpunkt des Umschaltens (Kommutierung) noch eine Induktionsspannung an den Kohlebürsten an, und es kommt zur Funkenbildung, dem Bürstenfeuer. In Anlagen, die ein gleichmäßiges Drehmoment verlangen und nur in einer Laufrichtung betrieben werden (z. B. starke Lüfter), kann das Bürstenfeuer verringert werden, indem der Bürstenträger leicht verdreht montiert wird und dann im Betriebszustand doch senkrecht zu den effektiven Feldlinien umschaltet. Dies erfordert jedoch eine Justierung im Betrieb und wird heute aus Kostengründen kaum noch durchgeführt. Stattdessen werden in großen Maschinen Wendepolwicklungen und Kompensationswicklungen eingesetzt, die die Feldlinien gleichsam in die ideale Lage „zurückbiegen“.
Gegenspannung
Der Anker dreht sich im Motor innerhalb des Statorfeldes. Nach dem Generatorprinzip wird so in dessen Spulen auch bei Motorbetrieb eine Spannung induziert. Diese induzierte Spannung ist wie die Betriebsspannung gepolt und wirkt daher dem Rotorstrom entgegen. Sie wird Gegenspannung oder Gegen-EMK genannt. Sie ist ein wichtiger Parameter von Motoren, mit ihrer Hilfe lässt sich in etwa die Leerlaufdrehzahl permanenterregter Motoren bestimmen.
Der Ankerstrom führt zu einem ohmschen Spannungsabfall am Ankerwiderstand (Kupfer), dieser Spannungsabfall steigt somit mit der Belastung des Motors (steigende Stromaufnahme) an und bewirkt bei Motoren einen Abfall der Drehzahl. Bei großen fremderregten Motoren ist dieser Drehzahlrückgang sehr gering.
Die Gegen-EMK ist streng linear abhängig von der Drehzahl des Ankers und der Stärke der Erregung. Die Gegen-EMK kann von Regelschaltungen genutzt werden, um die Drehzahl permanenterregter Motoren exakt zu stabilisieren; dies wird z. B. bei Kassetten-Tonbandgeräten angewendet.
Die Gegen-EMK macht bei Umkehr der Stromrichtung (Klemmenspannung < EMK) aus dem Motor einen Generator, sie kann zur Bremsung und zur Energierückspeisung (Nutzbremsung) dienen.
Bei Motorstillstand gibt es keine Gegenspannung. Deshalb haben fremd- und permanenterregte Gleichstrommotoren einen hohen Einschaltstrom – der Widerstand der Rotorspulen ist vergleichsweise klein und somit der Strom im Moment des Einschaltens sehr groß.
Ohne Begrenzung des Anlaufstromes werden große Motoren oder das speisende Netz eventuell überlastet, man verwendet daher in Reihe zum Anker Anlasswiderstände, die nach dem Hochlaufen stufenweise kurzgeschlossen werden.
Auch die Reihenschlussmotoren von Straßenbahnen wurden früher über Fahrschalter (Stufenwiderstand) angefahren, heute wird dies verlustärmer über Schaltregler (Chopperbetrieb) erreicht.
Bei Elektrolokomotiven verwendete man Transformatoren mit Stufenschaltern, an denen sich kleinere Stelltransformatoren von Stufe zu Stufe „hangelten“. Auch hier verwendet man heute stattdessen Leistungselektronik (IGBT-Schalter)Mathematische Grundlagen
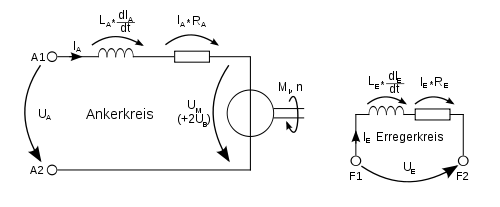 Ersatzschaltbild von Anker und Erregerwicklung (Feldwicklung)
Ersatzschaltbild von Anker und Erregerwicklung (Feldwicklung)Unter Vorgabe des Verbraucher-Zählpfeil-Systems (wie z. B. beim Ohmschen Gesetz vorausgesetzt) gilt
 (1)
(1)
Setzt man den Strom als zeitlich konstant voraus
 , folgt
, folgt bzw.
bzw. 
Berücksichtigt man zusätzlich das Induktionsgesetz, wird daraus
 (1a)
(1a)
Diese Gleichung lässt sich wie folgt deuten:
Für konstantes UA und dem in der Praxis kleinen RA ist die induzierte Spannung Uind unwesentlich kleiner als UA. Damit ist bei konstantem Drehmoment n ungefähr proportional der Ankerspannung. Im Bereich − Unenn < UA < Unenn ist damit die Drehzahl über die Ankerspannung steuerbar. Man spricht vom Ankerstellbereich. Für den Fall UA = Unenn und n = nnenn spricht man vom Typenpunkt. Oberhalb des Typenpunktes ist bei konstanter Ankerspannung UA eine Drehzahlsteigerung durch eine Verringerung des magnetischen Flusses über eine Verringerung des Erregerstromes möglich (Feldschwächbereich). Hierbei sind jedoch einige Randbedingungen zu beachten. Die Drehzahl darf einen zugelassenen Maximalwert nicht überschreiten. Wegen der Wirkung der Lorentzkraft gilt
n ungefähr proportional der Ankerspannung. Im Bereich − Unenn < UA < Unenn ist damit die Drehzahl über die Ankerspannung steuerbar. Man spricht vom Ankerstellbereich. Für den Fall UA = Unenn und n = nnenn spricht man vom Typenpunkt. Oberhalb des Typenpunktes ist bei konstanter Ankerspannung UA eine Drehzahlsteigerung durch eine Verringerung des magnetischen Flusses über eine Verringerung des Erregerstromes möglich (Feldschwächbereich). Hierbei sind jedoch einige Randbedingungen zu beachten. Die Drehzahl darf einen zugelassenen Maximalwert nicht überschreiten. Wegen der Wirkung der Lorentzkraft gilt  und folglich wird das zulässige Drehmoment M proportional mit kleiner.
und folglich wird das zulässige Drehmoment M proportional mit kleiner. (2)
(2)

Darin ist
 der Ankerstrom,
der Ankerstrom,  die Ankerspannung,
die Ankerspannung,  der Wicklungswiderstand,
der Wicklungswiderstand,  die Induktivität der Ankerwicklung,
die Induktivität der Ankerwicklung,  die Erregerspannung,
die Erregerspannung,  der Erregerstrom, der Wicklungswiderstand
der Erregerstrom, der Wicklungswiderstand  und die Induktivität
und die Induktivität  der Erregerwicklung,
der Erregerwicklung,  die Winkelgeschwindigkeit des Rotors,
die Winkelgeschwindigkeit des Rotors,  die im Anker induzierte Spannung,
die im Anker induzierte Spannung,  der Erregerfluss, der Luftspaltfluss, n die Drehzahl, M das Drehmoment, k1 und k2 je eine Maschinenkonstante.
der Erregerfluss, der Luftspaltfluss, n die Drehzahl, M das Drehmoment, k1 und k2 je eine Maschinenkonstante.
Die Gleichungen des mechanischen Systems mit der Annahme, dass der Erregerkreis nicht gesättigt ist:
 (3)
(3) (4)
(4)
Darin ist
 – die Anzahl der Windungen der Erregerwicklung,
– die Anzahl der Windungen der Erregerwicklung,  das Massenträgheitsmoment des Ankers und aller damit starr verbundenen Massen,
das Massenträgheitsmoment des Ankers und aller damit starr verbundenen Massen,  der Drehwinkel des Ankers, die Winkelgeschwindigkeit des Ankers,
der Drehwinkel des Ankers, die Winkelgeschwindigkeit des Ankers,  die Summe aller Lastmomente am Anker.
die Summe aller Lastmomente am Anker.  bezeichnet die sog. Maschinenkonstante.
bezeichnet die sog. Maschinenkonstante.
Einige Gleichungen anders angeschrieben:
- UA … Ankerspannung
- UE … Erregerspannung
- Uq … induzierte Spannung
- c … Maschinenkonstante
- Φ … magnetischer Fluss des Hauptfeldes
Literatur
- Rolf Fischer: Elektrische Maschinen. 14. Auflage. Hanser, 2009, ISBN 978-3-446-41754-0.
- Hans Otto Seinsch: Grundlagen elektrische Maschinen und Antriebe. Teubner, 1999, ISBN 3-519-06164-3.
- Klaus Fuest, Peter Döring: Elektrische Maschinen und Antriebe. Vieweg, 2004, ISBN 3-528-54076-1.
Einzelnachweise
- ↑ Rolf Fischer: Elektrische Maschinen. 14. Auflage. Hanser, 2009, ISBN ISBN 978-3-446-41754-0, S. 32 bis 33.
- ↑ Patent DE10102235A1 14. August 2002: Bürstenlose Gleichstrommaschine
Weblinks
- walter-fendt.de Animiertes Modell zum Prinzip des Elektromotors
- walter-fendt.de Animiertes Modell zum Prinzip des Generators
- Flash-Animation zum Gleichstrom-Motor (dwu-Unterrichtsmaterialien)
- Schöne Animation eines BLDC Motors in verschiedenen Schaltungsarten ( Block, Star, Sinus und Sensorless) - auch im Vergleich zum Schrittmotor. Flash














Wikimedia Foundation.