- Albert Hubo
-
Hubo Siehe auch: Koreanischer NameHangeul: 휴보 Revidiert: Hyubo McCune-R.: Hyubo  Albert HUBO, ein von HUBO Labs gebauter humanoider Roboter
Albert HUBO, ein von HUBO Labs gebauter humanoider RoboterDas Humanoid Robot Research Center (HUBO Labs) ist eine 1985 am KAIST gegründete Institution, die sich unter anderem mit dem Bau von humanoiden Robotern - zum Beispiel Albert Hubo - beschäftigt.
Inhaltsverzeichnis
Aufgabenbereiche der HUBO Labs
Im Hubo Lab forscht in 2 Bereichen:
- Im Bereich der Regelungstheorie beschäftigt man sich mit der optimalen Steuerung, neuronalen Netzen, Fuzzy-Reglern und der Sliding mode control.
- Im zweiten, experimentellen Bereich forscht man im Bereich der Robotik, zum Beispiel an sich bipedal fortbewegenden Robotern und am Aussehen der Sensore und Systeme.
Roboter der HUBO Labs
Übersicht
Name KHR-0 KHR-1 KHR-2 Hubo (KHR-3) Hubo FX-1 Albert Hubo Huboway Hubo 2 Roboter ferngesteuerter
humanoider
Roboterferngesteuerter
humanoider
Roboterferngesteuerter
humanoider
Roboterteilweise
ferngesteuerter
humanoider
Roboterferngesteuerter
bipedaler
Transport-
roboterhumanoider
Roboter"Segway-
Stehroller"teilweise
ferngesteuerter
humanoider
RoboterBeginn der Forschung Anfang 2003 Sep. 2004 Fertigstellung 2001 Jan. 2002 Anfang 2004 1.6.2005 Nov. 2005 2009 Größe 110 cm 120 cm 120 cm 125 cm 175 cm 137 cm 90 bis 130 cm 130 cm Masse 29 kg 48 kg 56 kg 56 kg 150 kg 57 kg 45 kg Betriebszeit 1 h 30 min 2 h, 30 min 2 bis 3 h Geschwindigkeit 1,25 km/h 20 km/h 3,3 km/h Haupt-Betriebssystem DOS Windows 2000
mit RTXWindows XP
mit RTXWindows XP
mit RTXWindows XP
mit RTXTI,
TMS320F2808Freiheitsgrade (DOFs) 12 21 41 41 12 66 40 DOFs - Beine (zusammen) 12 12 12 12 12 12 DOFs - Rumpf 1 1 1 1 1 DOFs - Arme (zusammen) 8 12 12 12 14 DOFs - Hände (zusammen) 10 10 10 10 DOFs - Nacken 2 2 2 3 DOFs - Kopf 4 4 29 Website hier hier ;
hierhier ;
hierhier ;
hierhier ;
hierhier ;
hierAnfänge
Die ersten von Hubo Labs gebauten humanoiden Roboter waren nur dazu gedacht, einen Prototypen für einen Laufroboter zu entwickeln. Sie besaßen 4 Freiheitsgrade und wurden noch fergesteuert.
KHR-0
Der 2001 fertiggestellte KHR-1 (Abkürzung für KAIST Humanoid Robot platform-1) besaß hingegen schon fortschrittliche 12 Freiheitsgrade, jedoch befanden sich diese nur in der Unterkörperkonstruktion, da bei ihm überwiegend auf eine große Beweglichkeit der Beine geachtet wurde. Er war 110 cm groß und wog 29 kg.
KHR-1
KHR-1, welcher im Januar 2002 fertiggestellt wurde, besaß hingegen auch 1 Freiheitsgrad im Rumpf und zusätzlich noch 4 pro Arm. Auch seine Abmessungen wurden gegenüber KHR-0 vergrößert. Er war nun 120 cm groß und besaß eine Masse von 48 kg. Er konnte stabil Laufen, wobei darauf geachtet worden war, dass er nur menschliche Bewegungen ausführen konnte (er konnte weder Rückwärtslaufen, noch konnte er sich Drehen, dafür konnte er Treppensteigen).
KHR-2
Sein Nachfolger KHR-2 hatte wiederum ein paar zusätzliche Funktionen. Er konnte als erster KAIST-Roboter teilweise Bewegungen unabhängig ausführen, wird aber dennoch teilweise ferngesteuert. Statt mit DOS lief er mit Microsoft Windows 2000 und konnte zusätzlich zu den Armen auch noch die Finger bewegen, von denen er als erster humanoider Roboter 10 unabhängig voneinander bewegen konnte. 2 weitere Freiheitsgrade sorgten nun dafür, dass er auch seinen Kopf bewegen konnte, darüber hinaus besaß er 2 Freiheitsgrade pro Auge, mit Hilfe deren er 2 CCD-Sensoren (1 pro Auge) unabhängig voneinander bewegen konnte. Außerdem konnte er gegenüber seinen Vorgängern nun auf unebenen Flächen laufen, dafür war es ihm nicht mehr möglich, Treppen zu bewältigen. Er wurde Anfang 2004 fertiggestellt, war 1,20 m hoch und wog 56 kg. Man konnte zusätzlich noch mit ihm mittles sprechen kommunizieren.
Hubo (KHR-3)
Der nächste Roboter ist der Januar 2005 fertiggestellte humanoide Roboter HUBO (Humanoider Roboter), der auch als KHR-3 bezeichnet wird. Überwiegend besaß er die gleichen Eigenschaften wie KHR-2, er besaß hingegen eine verbessterte Hülle, lief mit Microsoft Windows XP und seine Batterien hielten länger. Darüber hinaus besaß er noch ein paar weitere Verbesserungen. Wie sein Vörgänger standen ihm 2 Freiheitsgrade pro Auge, 2 im Nacken, 3 je Schulter, 1 pro Ellenbogen, 2 pro Hand plus 1 pro Finger, 1 im Rumpf, 3 je Hüfte, 1 pro Knie und 2 pro Fuß zur Verfügung, insgesamt also 41 zur Verfügung. Mit 1,25 m Höhe und 56 kg Masse hat er etwa die gleichen Ausmaße wie sein Vorgänger.
Die Entwicklung von Hubo kostete etw 1.000.000 USD, was wesentlich weiger ist als die 300.000.0000 USD, die ASIMOs Entwicklung kostete[1]Hubo FX-1
Der nächste Roboter der Hubo Labs, war diesmal kein humanoider Roboter, sondern glich eher einem sich bipedal vorbewegendem Rollstuhlersatz. Der 1,75 m große und 150 kg schwere Transport-Laufrobter verfügt über 3 Freiheitsgrade pro Hüftgelenk, 1 pro Kniegelenk und 2 pro Fuß und kann bis zu 100 kg schwere Personen und Gegestände transportieren. Man kann ihn mittels eines Joysticks lenken, außerdem verfügt er über Sensoren und Stoßdämpfer, die die Fortbewegung etwas angenehmer machen. Er läuft ebenfalls mit Microsoft Windows XP und kann unter anderem als Rollstuhlersatz, Transportroboter oder dem Militär dienen.
Eine etwas kleiner, von Toyota entwickelt und hergestellte ist der Toyota Mountable, ein Toyota Partner RobotAlbert Hubo
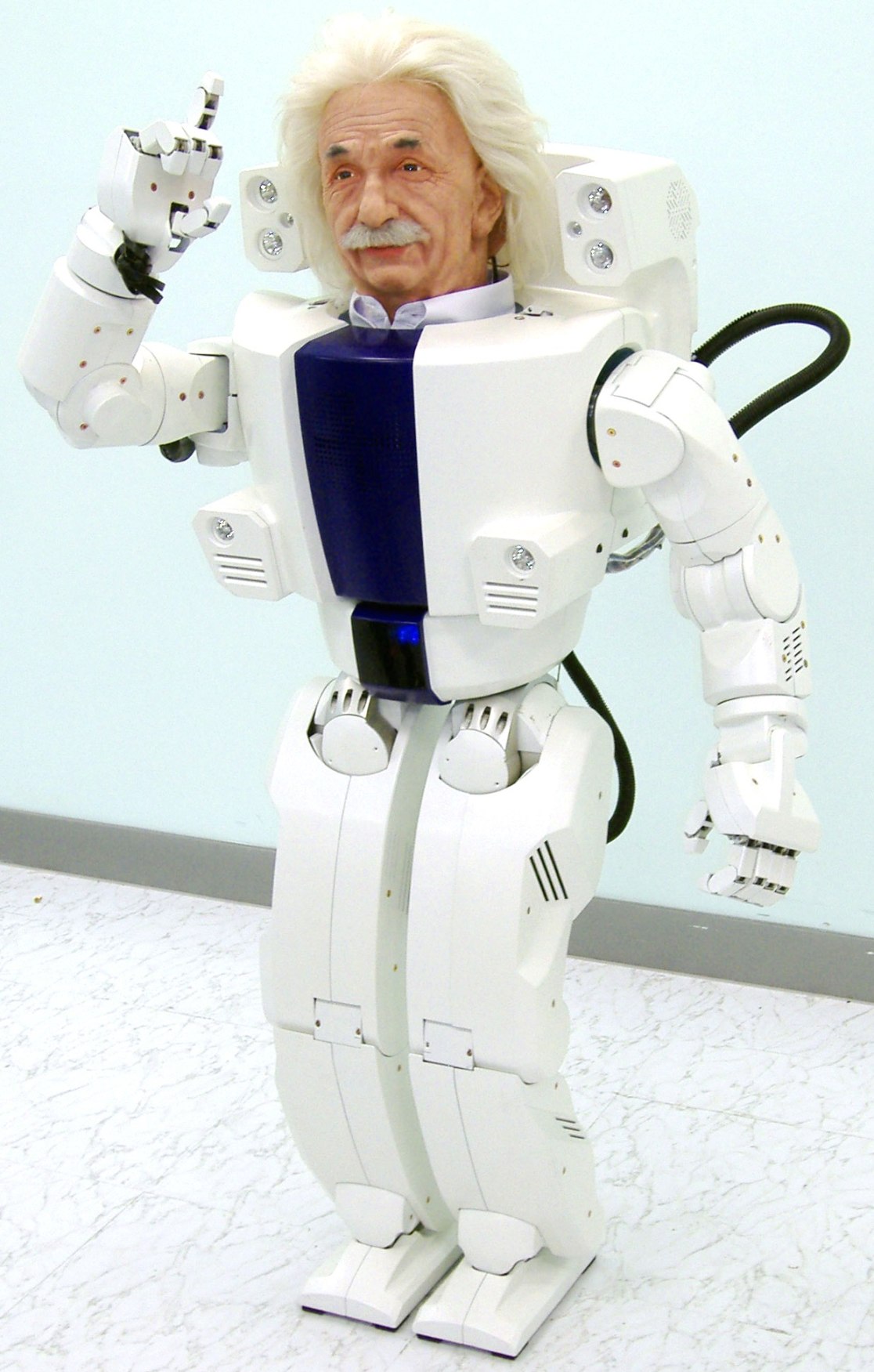
Albert HUBO, März 2005Der aktuelle humanoide Roboter der Hubo Labs ist Albert Hubo, welcher seit November 2005 zu sehen ist. Er funktioniert ebenfalls mit Microsoft Windows XP, ist 1,37 m groß und 57 kg schwer. Die Betriebzeit beträgt 2 Stunden und 30 Minuten.
Er besitzt genauso viele Freiheitsgrade wie KHR-3, plus 25 zusätzliche im Gesicht, in dem er eine Ganzkopfmaske von Albert Einstein trägt. Sie ist beweglich, so dass Albert Hubo sämtliche Mimik darstellen kann, beispielsweise Emotionen oder die passende Lippenbewegung zur Sprechwiedergabe. Er ist der erste Roboter überhaupt mit einer solchen menschenähnliche Ganzkopfmaske. Diese ist aus Frubber, welches auch des öfteren in Hollywood zur Maskenbildung eingesetzt wird. Sie wurde von Hanson Robotics angefertigt.
Außerdem kann Albert Hubo Begrüßungsrituale widergeben und selbstständig von einem Punkt zu einem anderen laufen. Er soll später, wie auch einige andere Roboter, neben der Unterhaltung anderer Personen älteren und bedürftigen Menschen helfen. Außerdem ist geplant, dass er irgendwann Treppensteigen kann.
Huboway
Der Huboway ist ein Steh-Elektroroller, der einem Segway Personal Transporter gelicht. Mit einer Maximalgeschwindigkeit von 20 km/h ist er auch genauso schnell wie ein Segway. Die Bleisäure-Batterie ermöglicht es etwa 2 bis 3 Stunden damit fahren zu können, bevor die Batterie wieder aufgeladen werden muss. Er ist höhenverstellbar, 90 bis 130 cm und wird von 2 Gleichstromelektromotoren mit 1 kW Leistung angetrieben. Das Fußtrittbrett ist 34,2 mal 36 cm groß, der Wendekreisradius beträgt 0, wie auch beim Segway.
Neben Menschen kann der Segway auch noch den humanoiden Roboter Hubo tragen, Ziel der Entwicklung ist unteranderm ein humanoider Roboter, der sich dann genause wie ein Segway forbewegt, wie es heute schon der Toyota Rolling beherrscht.Hubo 2
 Hobo 2 auf der Hannover Messe 2009
Hobo 2 auf der Hannover Messe 2009Hubo 2 ist eine 2009 erschienene neue Variante von Hubo (KHR-3), die sogar schon in Deutschland zu Besuch war (Hannover Messe 2009). Er ist 5 cm größer und 11 kg leichter als Hubo, besitzt allerdings "nur" 40 Freiheitsgrade. Hubo 2 kann allerdings mit einer Geschwindigkeit von bis zu 3,3 km/h rennen, sein Geh-Tempo liegt bei 1,4 km/h. Wie auch schon sein Vorgänger kann er Gegenstände greifen und Begrüßungsgesten (Handschütteln) ausführen. Darüber hinaus kann er "tanzen" und beherrscht das Taijiquan.
Weblinks
- HUBO Labs (engl.)
- Hanson-Robotics (engl.)
- http://ornella.iwr.uni-heidelberg.de/ROBOTICSLAB/TEACHING/HUMROB/v09.pdf
Einzelnachweise

Wikimedia Foundation.